A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 1
Volume 9
Issue 1
IEEE/CAA Journal of Automatica Sinica
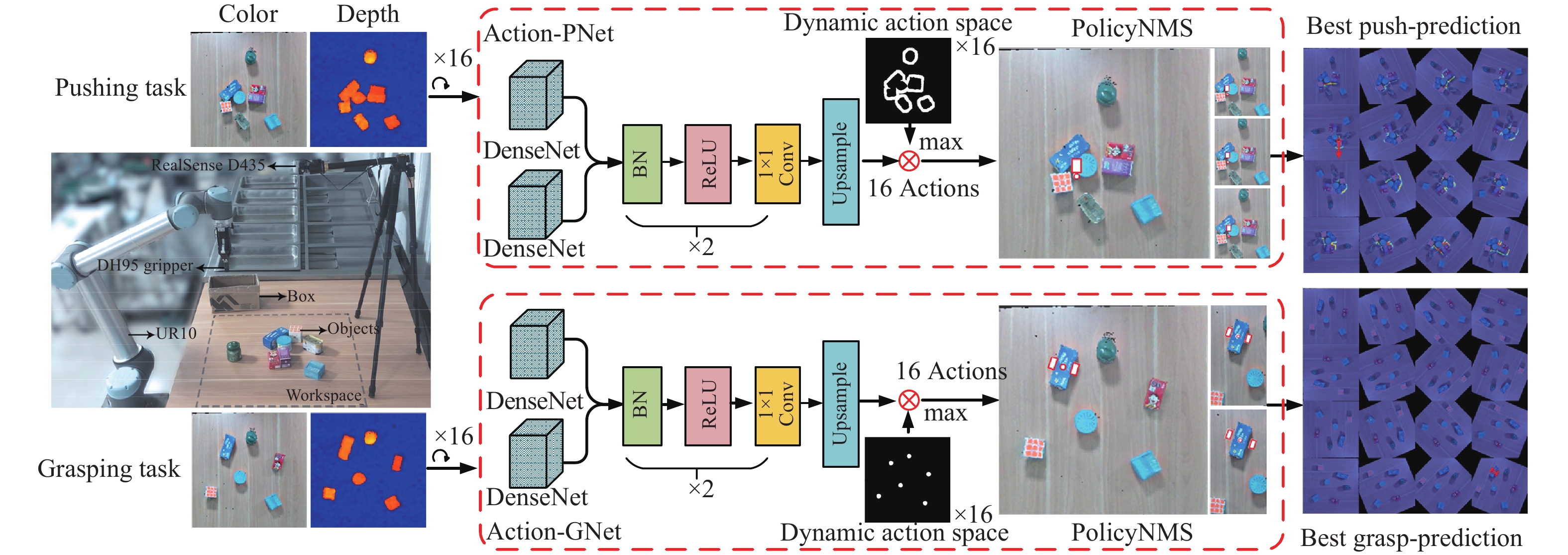
| Citation: | Y. X. Yang, Z. H. Ni, M. Y. Gao, J. Zhang, and D. C. Tao, “Collaborative pushing and grasping of tightly stacked objects via deep reinforcement learning,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 135–145, Jan. 2022. doi: 10.1109/JAS.2021.1004255

|

| [1] |
A. Rakshit, A. Konar, and A. K. Nagar, “A hybrid brain-computer interface for closed-loop position control of a robot arm,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1344–1360, Sep. 2020. doi: 10.1109/JAS.2020.1003336
|
| [2] |
J. Zhang and D. C. Tao, “Empowering things with intelligence: A survey of the progress, challenges, and opportunities in artificial intelligence of things,” IEEE Int. Things J., vol. 8, no. 10, pp. 7789–7817, May 2021. doi: 10.1109/JIOT.2020.3039359
|
| [3] |
A. Bicchi and V. Kumar, “Robotic grasping and contact: A review,” in Proc. IEEE Int. Conf. Robotics and Autom., San Francisco, CA, USA, 2000, pp. 348–353.
|
| [4] |
J. Mahler, J. Liang, S. Niyaz, M. Laskey, R. Doan, X. Y. Liu, J. A. Ojea, and K. Goldberg, “Dex-Net 2.0: Deep learning to plan robust grasps with synthetic point clouds and analytic grasp metrics,” 2017. [Online]. Available: https://arxiv.org/abs/1703.09312.
|
| [5] |
D. Morrison, P. Corke, and J. Leitner, “Closing the loop for robotic grasping: A real-time, generative grasp synthesis approach,” 2018. [Online]. Available: https://arxiv.org/abs/1804.05172.
|
| [6] |
S. Kumra, S. Joshi, and F. “Sahin, Antipodal robotic grasping using generative residual convolutional neural network,” 2021. [Online]. Available: arXiv: https://arxiv.org/abs/1909.04810.
|
| [7] |
I. Popov, N. Heess, T. Lillicrap, R. Hafner, G. Barth-Maron, M. Vecerik, T. Lampe, Y. Tassa, T. Erez, and M. Riedmiller, “Data-efficient deep reinforcement learning for dexterous manipulation,” 2017. [Online]. Available: http://export.arxiv.org/abs/1704.03073.
|
| [8] |
D. Quillen, E. Jang, O. Nachum, C. Finn, J. Ibarz, and S. Levine, “Deep reinforcement learning for vision-based robotic grasping: A simulated comparative evaluation of off-policy methods,” in Proc. IEEE Int. Conf. Robotics and Autom. (ICRA), Brisbane, QLD, Australia, 2018, pp. 6284–6291.
|
| [9] |
M. Breyer, F. Furrer, T. Novkovic, R. Siegwart, and J. Nieto, “Comparing task simplifications to learn closed-loop object picking using deep reinforcement learning,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 1549–1556, Apr. 2019. doi: 10.1109/LRA.2019.2896467
|
| [10] |
U. Viereck, A. ten Pas, K. Saenko, and R. Platt, “Learning a visuomotor controller for real world robotic grasping using simulated depth images,” in Proc. 1st Conf. Robot Learning, Mountain View, United States, 2017, pp. 291–300.
|
| [11] |
M. R. Dogar and S. S. Srinivasa, “A planning framework for nonprehensile manipulation under clutter and uncertainty,” Auton. Robot., vol. 33, no. 3, pp. 217–236, Oct. 2012. doi: 10.1007/s10514-012-9306-z
|
| [12] |
A. Zeng, S. R. Song, S. Welker, J. Lee, A. Rodriguez, and T. Funkhouser, “Learning synergies between pushing and grasping with self-supervised deep reinforcement learning,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), Madrid, Spain, 2018, pp. 4238–4245.
|
| [13] |
A. Hundt, B. Killeen, N. Greene, H. T. Wu, H. Kwon, C. Paxton, and G. D. Hager, ““Good robot!”: Efficient reinforcement learning for multi-step visual tasks with SIM to real transfer,” IEEE Robot. Autom. Lett., vol. 5, no. 4, pp. 6724–6731, Oct. 2020. doi: 10.1109/LRA.2020.3015448
|
| [14] |
B. Tang, M. Corsaro, G. Konidaris, S. Nikolaidis, and S. Tellex, “Learning collaborative pushing and grasping policies in dense clutter,” in Proc. IEEE Int. Conf. Robotics and Autom. (ICRA), Xi’an, China, 2021.
|
| [15] |
G. Peng, J. H. Liao, and S. B. Guan, “A pushing-grasping collaborative method based on deep q-network algorithm in dual perspectives,” 2021. [Online]. Available: https://arxiv.org/abs/2101.00829v1.
|
| [16] |
Z. P. Yang and H. L. Shang, “Robotic pushing and grasping knowledge learning via attention deep q-learning network,” in Proc. Int. Conf. Knowledge Science, Engineering and Management, Hangzhou, China, 2020, pp. 223–234.
|
| [17] |
W. Kehl, F. Manhardt, F. Tombari, S. Ilic, and N. Navab, “SSD-6D: Making RGB-based 3D detection and 6D pose estimation great again,” in Proc. IEEE Int. Conf. Computer Vision, Venice, Italy, 2017, pp. 1530–1538.
|
| [18] |
C. Wang, D. F. Xu, Y. K. Zhu, R. Martín-Martín, C. W. Lu, F. F. Li, and S. Savarese, “DenseFusion: 6D object pose estimation by iterative dense fusion,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Long Beach, CA, USA, 2019, pp. 3338–3347.
|
| [19] |
W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C. Y. Fu, and A. C. Berg, “SSD: Single shot multibox detector,” in Proc. European Conf. Computer Vision, Amsterdam, The Netherlands, 2016, pp. 21–37.
|
| [20] |
S. R. Song, A. Zeng, J. Lee, and T. Funkhouser, “Grasping in the wild: Learning 6DoF closed-loop grasping from low-cost demonstrations,” IEEE Robot. Autom. Lett., vol. 5, no. 3, pp. 4978–4985, Jul. 2020. doi: 10.1109/LRA.2020.3004787
|
| [21] |
D. Kalashnikov, A. Irpan, P. Pastor, J. Ibarz, A. Herzog, E. Jang, D. Quillen, E. Holly, M. Kalakrishnan, V. Vanhoucke, and S. Levine, “Scalable deep reinforcement learning for vision-based robotic manipulation,” in Proc. 2nd Conf. Robot Learning, Zürich, Switzerland, 2018, pp. 651–673.
|
| [22] |
A. Ghadirzadeh, A. Maki, D. Kragic, and M. Björkman, “Deep predictive policy training using reinforcement learning,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 2017, pp. 2351–2358.
|
| [23] |
C. Finn and S. Levine, “Deep visual foresight for planning robot motion,” in Proc. IEEE Int. Conf. Robotics and Autom. (ICRA), Singapore, 2017, pp. 2786–2793.
|
| [24] |
M. Gupta, J. Müller, and G. S. Sukhatme, “Using manipulation primitives for object sorting in cluttered environments,” IEEE Trans. Autom. Sci. Eng., vol. 12, no. 2, pp. 608–614, Apr. 2015. doi: 10.1109/TASE.2014.2361346
|
| [25] |
D. Katz, A. Venkatraman, M. Kazemi, J. A. Bagnell, and A. Stentz, “Perceiving, learning, and exploiting object affordances for autonomous pile manipulation,” Auton. Robot., vol. 37, no. 4, pp. 369–382, Dec. 2014. doi: 10.1007/s10514-014-9407-y
|
| [26] |
A. Eitel, N. Hauff, and W. Burgard, “Learning to singulate objects using a push proposal network,” in Robotics Research, N. M. Amato, G. Hager, S. Thomas, and M. Torres-Torriti, Eds. Puerto Varas, Chile: Springer, 2020, pp. 405–419.
|
| [27] |
M. Andrychowicz, F. Wolski, A. Ray, J. Schneider, R. Fong, P. Welinder, B. McGrew, J. Tobin, P. Abbeel, and W. Zaremba, “Hindsight experience replay,” 2018. [Online]. Available: https://arxiv.org/pdf/1707.01495.pdf.
|
| [28] |
M. Kiatos and S. Malassiotis, “Robust object grasping in clutter via singulation,” in Proc. Int. Conf. Robotics and Autom. (ICRA), Montreal, QC, Canada, 2019, pp. 1596–1600.
|
| [29] |
D. P. Bertsekas, “Feature-based aggregation and deep reinforcement learning: A survey and some new implementations,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 1–31, Jan. 2019. doi: 10.1109/JAS.2018.7511249
|
| [30] |
L. Jiang, H. Y. Huang, and Z. H. Ding, “Path planning for intelligent robots based on deep Q-learning with experience replay and heuristic knowledge,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1179–1189, Jul. 2020. doi: 10.1109/JAS.2019.1911732
|
| [31] |
V. Mnih, K. Kavukcuoglu, D. Silver, A. Graves, I. Antonoglou, D. Wierstra, and M. Riedmiller, “Playing atari with deep reinforcement learning,” 2013. [Online]. Available: https://arxiv.org/abs/1312.5602v1.
|
| [32] |
V. Mnih, K. Kavukcuoglu, D. Silver, A. A. Rusu, J. Veness, M. G. Bellemare, A. Graves, M. Riedmiller, A. K. Fidjeland, G. Ostrovski, S. Petersen, C. Beattie, A. Sadik, I. Antonoglou, H. King, D. Kumaran, D. Wierstra, S. Legg, and D. Hassabis, “Human-level control through deep reinforcement learning,” Nature, vol. 518, no. 7540, pp. 529–533, Feb. 2015. doi: 10.1038/nature14236
|
| [33] |
H. Van Hasselt, A. Guez, and D. Silver, “Deep reinforcement learning with double Q-learning,” in Proc. 13th AAAI Conf. Artificial Intelligence, Phoenix, Arizona, 2016, 2094–2100.
|
| [34] |
G. Huang, Z. Liu, L. Van Der Maaten, and K. Q. Weinberger, “Densely connected convolutional networks,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Honolulu, HI, USA, 2017, pp. 2261–2269.
|
| [35] |
J. Deng, W. Dong, R. Socher, L. J. Li, K. Li, and F. F. Li, “ImageNet: A large-scale hierarchical image database,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Miami, FL, USA, 2009, pp. 248–255.
|
| [36] |
S. Ioffe and C. Szegedy, “Batch normalization: Accelerating deep network training by reducing internal covariate shift,” in Proc. 32nd Int. Conf. Machine Learning, Lille, France, 2015, pp. 448–456.
|
| [37] |
V. Nair and G. E. Hinton, “Rectified linear units improve restricted Boltzmann machines,” in Proc. 27th Int. Conf. Machine Learning, Haifa, Israel, 2010, pp. 807–814.
|
| [38] |
N. Bodla, B. Singh, R. Chellappa, and L. S. Davis, “Soft-NMS-improving object detection with one line of code,” in Proc. IEEE Int. Conf. Computer Vision, Venice, Italy, 2017, pp. 5562–5570.
|
| [39] |
J. Zhang, Z. Chen, and D. C. Tao, “Towards high performance human keypoint detection,” Int. J. Comput. Vis., vol. 129, no. 9, pp. 2639–2662, Sep. 2021. doi: 10.1007/s11263-021-01482-8
|
| [40] |
J. H. Zhang, W. Zhang, R. Song, L. Ma, and Y. B. Li, “Grasp for stacking via deep reinforcement learning,” in Proc. IEEE Int. Conf. Robotics and Autom. (ICRA), Paris, France, 2020, pp. 2543–2549.
|
| [41] |
O. Mees, N. Abdo, M. Mazuran, and W. Burgard, “Metric learning for generalizing spatial relations to new objects,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 2017, pp. 3175–3182.
|
| [42] |
T. Schaul, J. Quan, I. Antonoglou, and D. Silver, “Prioritized experience replay,” 2016. [Online]. Available: https://arxiv.org/abs/1511.05952.
|
Figures(12) / Tables(3)






 DownLoad:
DownLoad: