A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 6
Issue 4
Volume 6
Issue 4
IEEE/CAA Journal of Automatica Sinica
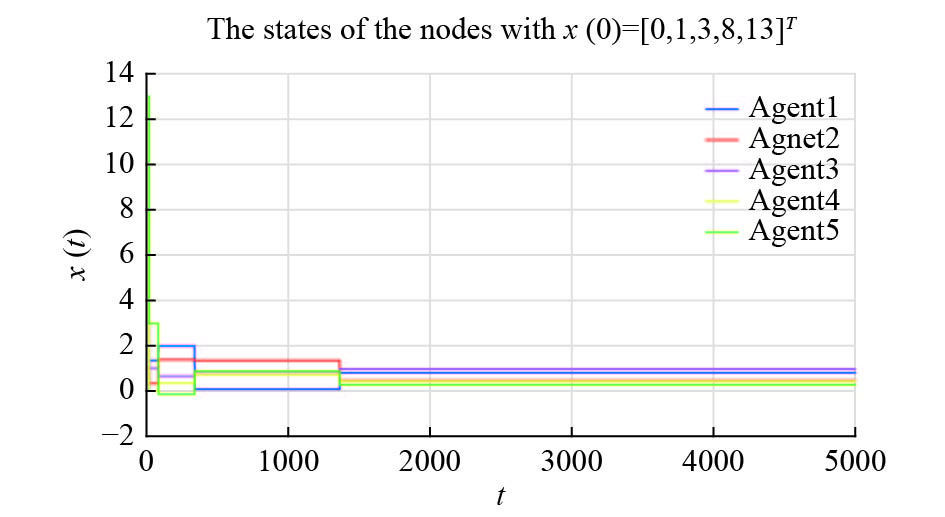
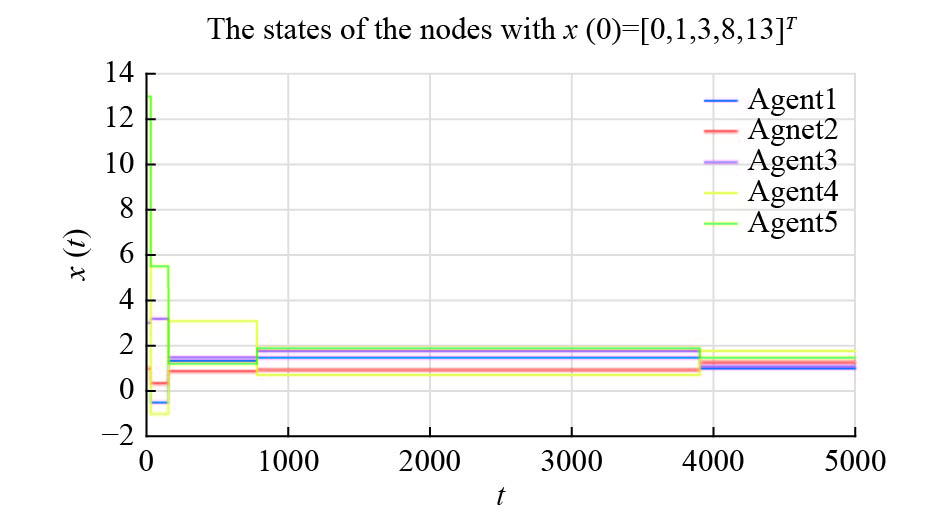
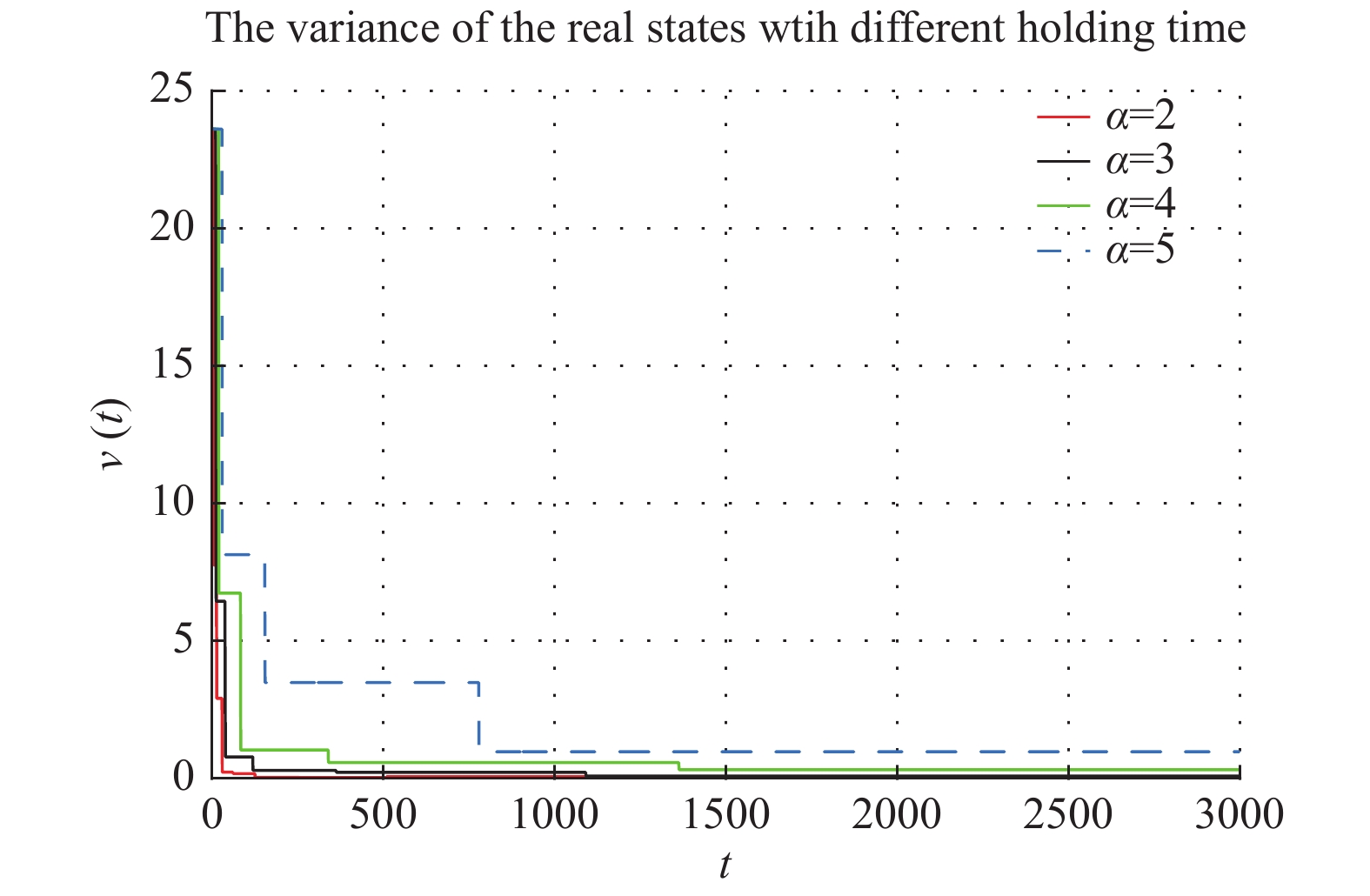
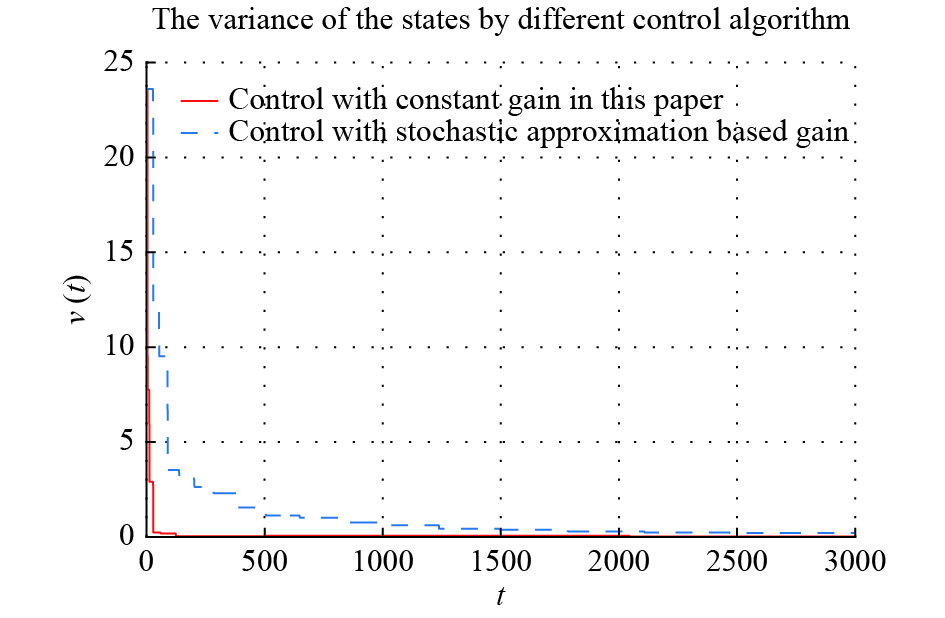
| Citation: | Ting Wang, Min Hu and Yanlong Zhao, "Consensus Control With a Constant Gain for Discrete-time Binary-valued Multi-agent Systems Based on a Projected Empirical Measure Method," IEEE/CAA J. Autom. Sinica, vol. 6, no. 4, pp. 1052-1059, July 2019. doi: 10.1109/JAS.2019.1911594

|

| [1] |
A. Jadbabaie, J. Lin, and A. S. Morse, " Coordination of groups of mobile autonomous agents using nearest neighbor rules,” IEEE Trans. Autom. Control, vol. 48, no. 6, pp. 988–1000, 2003. doi: 10.1109/TAC.2003.812781
|
| [2] |
H. G. Tanner, A. Jadbabaie, and G. J. Pappas, " Flocking in fixed and switching networks,” IEEE Trans. Autom. Control, vol. 52, no. 5, pp. 863–868, 2007. doi: 10.1109/TAC.2007.895948
|
| [3] |
H. Liang, Y. Zhang, T. Huang, and H. Ma, " Prescribed performance cooperative control for multiagent systems with input quantization,” IEEE Trans. Cybernetics, 2019. doi: 10.1109/TCYB.2019.2893645,2019
|
| [4] |
Z. Zhang, H. Liang, C. Wu, and C. K. Ahn, " Adaptive event-triggered output feedback fuzzy control for nonlinear networked systems with packet dropouts and actuator failure,” IEEE Trans. Fuzzy Systems, vol. 99, pp. 1–1, 2019.
|
| [5] |
Y. Jia and W. Zhang, " Distributed adaptive flocking of robotic fish system with a leader of bounded unknown input,” Int. J. Control,Automation and Systems, vol. 12, no. 5, pp. 1049–1058, 2014.
|
| [6] |
N. N. Jia and L. Wang, " Leader-follower flocking of multiple robotic fish,” IEEE-ASME Trans. Mechatronics, vol. 20, no. 3, pp. 1372–1383, 2015. doi: 10.1109/TMECH.2014.2337375
|
| [7] |
R. X. Cui, S. S. Ge, B. V. E. How, and Y. S. Choo, " Leader-follower formation control of underactuated autonomous underwater vehicles,” Ocean Engineering, vol. 37, no. 17, pp. 1491–1502, 2010.
|
| [8] |
J. Yang, X. Wang, and P. Bauer, " V-shaped formation control for robotic swarms constrained by field of view,” Applied Sciences-Basel, vol. 8, no. 11, pp. 401–420, 2004.
|
| [9] |
J. W. Cao, D. P. Spooner, S. A. Jarvis, and G. R. Nudd, " Grid load balancing using intelligent agents,” Future Generation Computer Systems, vol. 21, no. 1, pp. 135–149, 2005. doi: 10.1016/j.future.2004.09.032
|
| [10] |
W. C. Meng, X. Y. Wang, and S. C. Liu, " Distributed load sharing of an inverter-based microgrid with reduced communication,” IEEE Trans. Smart Grid, vol. 9, no. 2, pp. 1354–1364, 2018. doi: 10.1109/TSG.2016.2587685
|
| [11] |
R. W. Beard, J. Lawton, and F. Y. Hadaegh, " A coordination architecture for spacecraft formation control,” IEEE Trans. Control Systems Technology, vol. 9, pp. 777–790, 2001. doi: 10.1109/87.960341
|
| [12] |
W. Ren and R. W. Beard, " Decentralized scheme for spacecraft formation flying via the virtual structure approach,” J. Guidance,Control,and Dynamics, vol. 27, pp. 73–82, 2004. doi: 10.2514/1.9287
|
| [13] |
D. Bauso, L. Giarre, and R. Pesenti, " Attitude alignment of a team of UAVs under decentralized information structure”, in Proc. IEEE Internation Conf. Control Applications, 2003, pp. 486-491.
|
| [14] |
R. Olfati-Saber and R. M. Murray, " Consensus problems in networks of agents with switching topology and time-Delays,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1520–1533, 2004. doi: 10.1109/TAC.2004.834113
|
| [15] |
J. A. Fax and R. M. Murray, " Information flow and cooperative control of vehicle formations,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1465–1476, 2004. doi: 10.1109/TAC.2004.834433
|
| [16] |
W. Ren and Y. Cao, Distributed Coordination of Multi-agent Networks- Emergent Problems, Models, and Issues, London: Springer, 2011.
|
| [17] |
A. Kashyap, T. Basar, and R. Srikant, " Consensus with quantized information updates”, in Proc. 45th IEEE Conf. Decision Control, 2006, pp. 2728-2733.
|
| [18] |
A. Kashyap, T. Basar, and R. Srikant, " Quantized consensus,” Automatica, vol. 43, no. 7, pp. 1192–1203, 2007. doi: 10.1016/j.automatica.2007.01.002
|
| [19] |
P. Frasca, R. Carli, F. Fagnani, and S. Zampieri, " Average consensus on networkswith quantized communication,” Int. J. Nonlinear and Robust Control, vol. 19, no. 16, pp. 1787–1816, 2009. doi: 10.1002/rnc.v19:16
|
| [20] |
S. Liu, T. Li, L. Xie, M. Fu, and J. F. Zhang, " Continuous-time and sampled-data-based average consensus with logarithmic quantizers,” Automatica, vol. 49, no. 11, pp. 3329–3336, 2013. doi: 10.1016/j.automatica.2013.07.016
|
| [21] |
R. Carli, F. Bullo, and S. Zampieri, " Quantized average consensus via dynamic coding/decoding schemes,” Int. J. Nonlinear and Robust Control, vol. 20, no. 2, pp. 156–175, 2010. doi: 10.1002/rnc.v20:2
|
| [22] |
T. Li, M. Fu, L. Xie, and J. F. Zhang, " Distributed consensus with limited communication data rate,” IEEE Trans. Autom. Control, vol. 56, no. 2, pp. 279–292, 2011. doi: 10.1109/TAC.2010.2052384
|
| [23] |
L. Y. Wang, J. F. Zhang, and G. Yin, " System identification using binary sensors,” IEEE Trans. Autom. Control, vol. 48, no. 11, pp. 1892–1907, 2003. doi: 10.1109/TAC.2003.819073
|
| [24] |
J. C. Aguero, G. C. Goodwin, and J. I. Yuz, " System identification using quantized data”, in Proc. 46th IEEE Conf. Decision Control, 2007, pp. 4263-4268.
|
| [25] |
M. Casini, A. Garulli, and A. Vicino, " Time complexity and input design in worst-case identification using binary sensors”, in Proc. 46th IEEE Conf. Decision Control, 2007, pp. 5528-5533.
|
| [26] |
Y. L. Zhao, W. J. Bi, and T. Wang, " Iterative parameter estimate with batched binary-valued observations,” Science China Information Sciences, vol. 59, pp. 052201:1–052201:18, 2016.
|
| [27] |
Y. L. Zhao, T. Wang, and W. J. Bi, " Consensus protocol for multi-agent systems with undirected topologies and binary-valued communications,” IEEE Trans. Automatic Control, vol. 64, no. 1, pp. 206–221, 2019. doi: 10.1109/TAC.2018.2814632
|
| [28] |
T. Wang, H. Zhang, and Y. L. Zhao, " Average consensus of multi-agent systems under directed topologies and binary-valued communications,” IEEE Access, vol. 6, pp. 55995–56006, 2018. doi: 10.1109/ACCESS.2018.2872755
|
| [29] |
X. M. Wang, T. Wang, C. B. Xu, and Y. L. Zhao, " Average Consensus for multi-agent system with measurement noise and binaryvaluedcommunication,” Asian J. Control, vol. 21, no. 4, pp. 1–14, 2019.
|
| [30] |
P. H. Calamai and J. J. More, " Projected gradient methods for linearly constrained problems,” Mathematical Programming, vol. 39, no. 1, pp. 93–116, 1987. doi: 10.1007/BF02592073
|
| [31] |
M. Mesbahi and M. Egerstedt. Graph theoretic methods in multiagent networks. Princeton University Press, 2010.
|
Figures(9)






 DownLoad:
DownLoad: