A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 8
Issue 11
Volume 8
Issue 11
IEEE/CAA Journal of Automatica Sinica
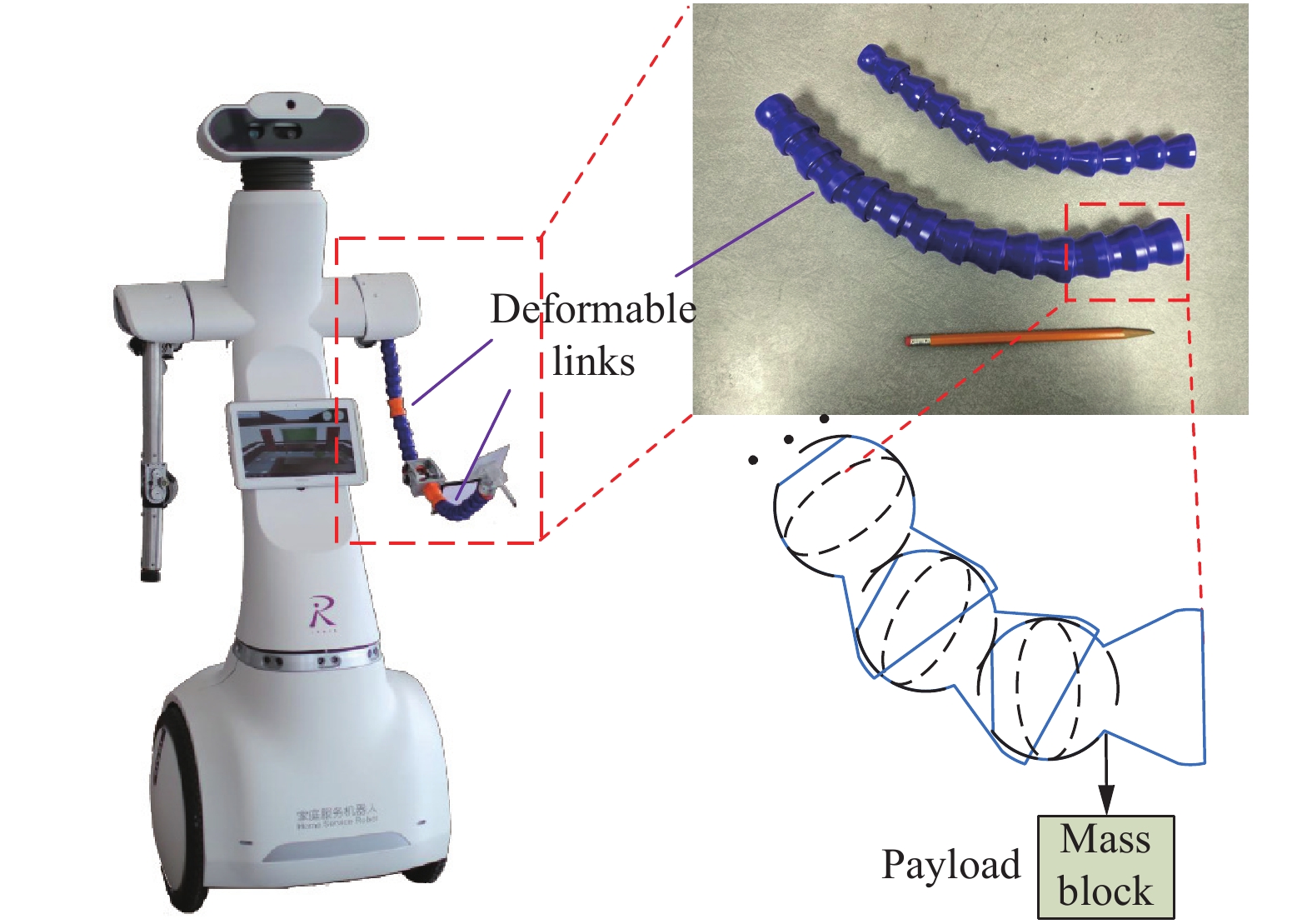
| Citation: | G. F. Li, D. Z. Song, L. Sun, S. Xu, H. P. Wang, and J. T. Liu, "Static Force-Based Modeling and Parameter Estimation for a Deformable Link Composed of Passive Spherical Joints With Preload Forces," IEEE/CAA J. Autom. Sinica, vol. 8, no. 11, pp. 1817-1826, Nov. 2021. doi: 10.1109/JAS.2019.1911549

|

| [1] |
R. C. Luo, M. C. Ko, Y. T. Chung, and R. Chatila, “Repulsive reaction vector generator for whole-arm collision avoidance of 7-DoF redundant robot manipulator,” in Proc. IEEE/ASME Int. Conf. Advanced Intelligence Mechatronics, Besancon, France, 2014, pp. 1036–1041.
|
| [2] |
T. S. Li, C. J. Lin, P. H. Kuo, and Y. H. Wang, Grasping Posture Control Design for a Home Service Robot using an ABC-based Adaptive PSO Algorithm, International Journal of Advanced Robotic Systems, vol. 13, no. 3, p. 118, 2016.
|
| [3] |
A. Kazakidi, X. Zabulis, and D. P. Tsakiris, “Vision-based 3D motion reconstruction of octopus arm swimming and comparison with an 8-arm underwater robot,” in Proc. IEEE Int. Conf. Robotics and Automation, Seattle, USA, 2015, pp. 1178–1183.
|
| [4] |
M. Sfakiotakis, A. Kazakidi, A. Chatzidaki, T. Evdaimon, and D. P. Tsakiris, “Multi-arm robotic swimming with octopus-inspired compliant web,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Chicago, USA, 2014, pp. 302–308.
|
| [5] |
Y. Sakuhara, H. Shimizu, and K. Ito, “Climbing soft robot inspired by octopus”, in Proc. IEEE Int. Conf. Intell. Syst., Varna, Bulgaria, 2020, pp. 463–468.
|
| [6] |
V. Falkenhahn, F. A. Bender, A. Hildebrandt, R. Neumann, and O. Sawodny, “Online TCP trajectory planning for redundant continuum manipulators using quadratic programming,” in Proc. IEEE Int. Conf. Advanced Intelligent Mechatronics, Alberta, Canada, 2016, pp. 1163–1168.
|
| [7] |
C. Escande, T. Chettibi, R. Merzouki, V. Coelen, and P. M. Pathak, “Kinematic calibration of a multisection bionic manipulator,” IEEE/ASME Trans. Mechatronics, vol. 20, no. 2, pp. 663–674, 2015. doi: 10.1109/TMECH.2014.2313741
|
| [8] |
T. Mahl, A. Hildebrandt, and O. Sawodny, “A variable curvature continuum kinematics for kinematic control of the bionic handling assistant,” IEEE Trans. Robotics, vol. 30, no. 4, pp. 935–949, 2014. doi: 10.1109/TRO.2014.2314777
|
| [9] |
H. B. Gilbert, D. C. Rucker, and R. J. Webster, “Concentric tube robots: The state of the art and future directions,” Robotics Research, 2016, pp. 253–269.
|
| [10] |
C. Bergeles, A. H. Gosline, N. V. Vasilyev, P. J. Codd, P. J. Nido, and P. E. Dupont, “Concentric tube robot design and optimization based on task and anatomical constraints,” IEEE Trans. Robotics, vol. 31, no. 1, pp. 67–84, 2015. doi: 10.1109/TRO.2014.2378431
|
| [11] |
M. F. Rox, D. S. Ropella, R. J. Hendrick, E. Blum, R. P. Naftel, H. C. Bow, S. D. Herrell, K. D. Weaver, L. B. Chambless, and R. J. Webster III, “Mechatronic design of a two-arm concentric tube robot system for rigid neuroendoscopy,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 3, pp. 1432–1443, 2020.
|
| [12] |
G. Li, L. Sun, X. Lu, J. Hao, and J. Liu, “A practical, fast, and lowcost kinematic calibration scheme for a deformable manipulator by using leap motion,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, Qingdao, China, 2016, pp. 719–724.
|
| [13] |
G. Li, S. Xu, L. Sun, and J. Liu, “Kinematic-free position control for a deformable manipulator,” in Proc. 35th Chinese Control Conf., Chengdu, China, 2016, pp. 10302–10307.
|
| [14] |
G. Li, L. Sun, S. Xu, D. Song, and J. Liu, “A hybrid model and kinematic-free control framework for a low-cost deformable manipulatror using in home service,” in Proc. IEEE Int. Conf. Automation Science and Engineering, Fort Worth, Texas, 2016, pp. 1002–1007.
|
| [15] |
M. C. Yip and D. B. Camarillo, “Model-less hybrid position/force control: A minimalist approach for continuum manipulators in unknown,” Constrained Environments,IEEE Robotics and Automation Letters, vol. 1, no. 2, pp. 844–851, 2016. doi: 10.1109/LRA.2016.2526062
|
| [16] |
M. C. Yip and D. B. Camarillo, “Model-less feedback control of continuum manipulators in constrained environments,” IEEE Trans. Robotics, vol. 30, no. 4, pp. 880–889, 2014. doi: 10.1109/TRO.2014.2309194
|
| [17] |
N. G. Cheng, M. B. Lobovsky, S. J. Keating, A. M. Setapen, K. I. Gero, A. E. Hosoi, and K. D. Iagnemma, “Design and analysis of a robust, lowcost, highly articulated manipulator enabled by jamming of granular media,” in Proc. IEEE Int. Conf. Robotics and Automation, Saint Paul, USA, 2012, pp. 4328–4333.
|
| [18] |
H. Jiang, Z. Wang, Y. Jin, X. Chen, P. Li, Y. Gan, S. Lin, and X. Chen, “Hierarchical control of soft manipulators towards unstructured interactions,” The Int. J. of Robot. Research, vol. 40, no. 1, pp. 411–434, 2021.
|
| [19] |
R. H. Sturges and S. Laowattana, “A flexible tendon-controlled device for endoscopy,” The Int. J. Robotics Research, vol. 12, no. 2, pp. 121–131, 1993. doi: 10.1177/027836499301200202
|
| [20] |
K. S. Roh, S. Yoon, Y. D. Kwon, Y. Shim, and Y.-J. Kim, “Single-port surgical robot system with flexible surgical instruments,” in Proc. Int. Conf. Intelligent Robotics and Applications, vol. 9245, pp. 447–459, 2015.
|
| [21] |
J. Lee, Y.-J. Kim, S. Roh, J. Kim, Y. Lee, J. Kim, B. Choi, and K. Roh, “Tension propagation analysis of novel robotized surgical platform for transumbilical single-port access surgery,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Tokyo, Japan, 2013, pp. 3083–3089.
|
| [22] |
A. R. Hanzaki, S. K. Saha, and P. Rao, “An improved dynamic modeling of a multibody system with spherical joints,” Multibody System Dynamics, vol. 21, no. 4, pp. 325–345, 2009. doi: 10.1007/s11044-008-9141-3
|
| [23] |
J. Zhang, H. Guo, R. Liu, and Z. Deng, “Nonlinear characteristic of spherical joints with clearance,” J. Aerospace Technology and Management, vol. 7, no. 2, pp. 179–184, 2015. doi: 10.5028/jatm.v7i2.464
|
| [24] |
P. Flores, J. Ambrósio, J. C. P. Claro, and H. M. Lankarani, “Dynamics of multibody systems with spherical clearance joints,” J. Computational and Nonlinear Dynamics, vol. 1, no. 3, pp. 240–247, 2006. doi: 10.1115/1.2198877
|
| [25] |
A. Faraz and S. Payandeh, “Towards approximate models of coulomb frictional moments in: (I) Revolute pin joints and (II) Spherical-socket ball joints,” J. Engineering Mathematics, vol. 40, no. 3, pp. 283–296, 2001. doi: 10.1023/A:1017545030199
|
| [26] |
A. Uguz and S. H. Oka, “Modeling the effects of mechanical loads: Finite element modeling of ball joints under dynamic loading,” Materialpruefung/Materials Testing, vol. 46, no. 10, pp. 506–512, 2004. doi: 10.3139/120.100618
|
| [27] |
G. G. Adams and M. Nosonovsky, “Contact modeling-forces,” Tribology International, vol. 33, no. 5–6, pp. 431–442, 2000. doi: 10.1016/S0301-679X(00)00063-3
|
| [28] |
T. Schmidt, R. Newcombe, and D. Fox, “DART: Dense articulated realtime tracking with consumer depth cameras,” Autonomous Robots, vol. 39, no. 3, pp. 239–258, 2015. doi: 10.1007/s10514-015-9462-z
|
Figures(12) / Tables(5)







 DownLoad:
DownLoad: