2021, 8(10): 1709-1714.
doi: 10.1109/JAS.2021.1004147
Abstract:
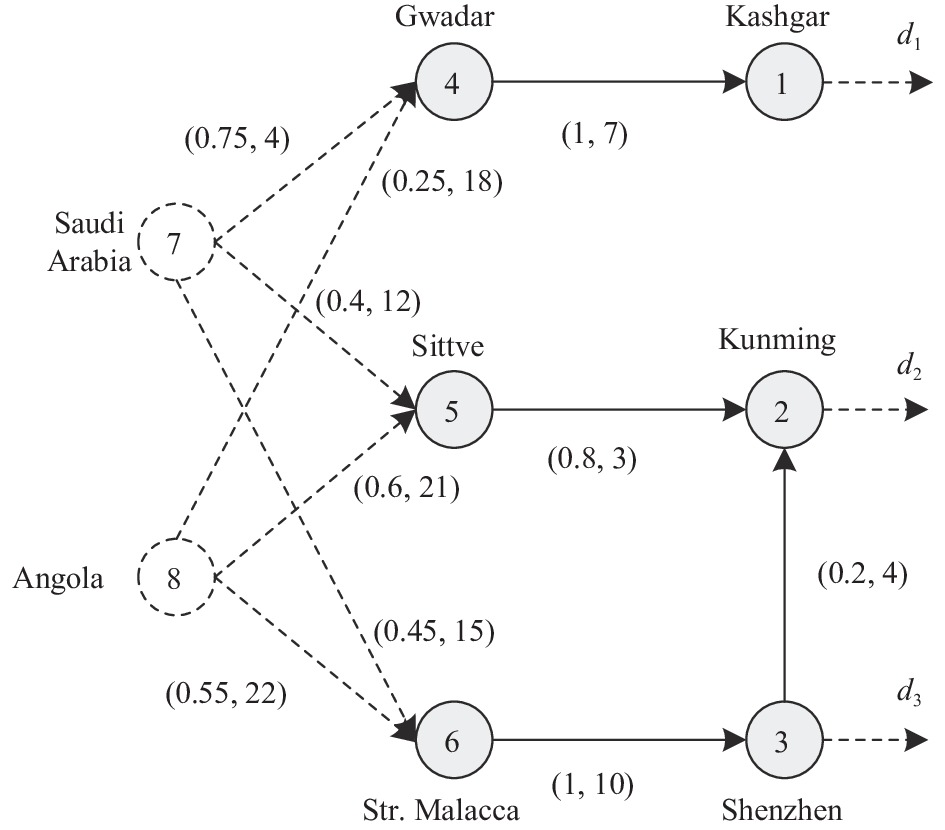
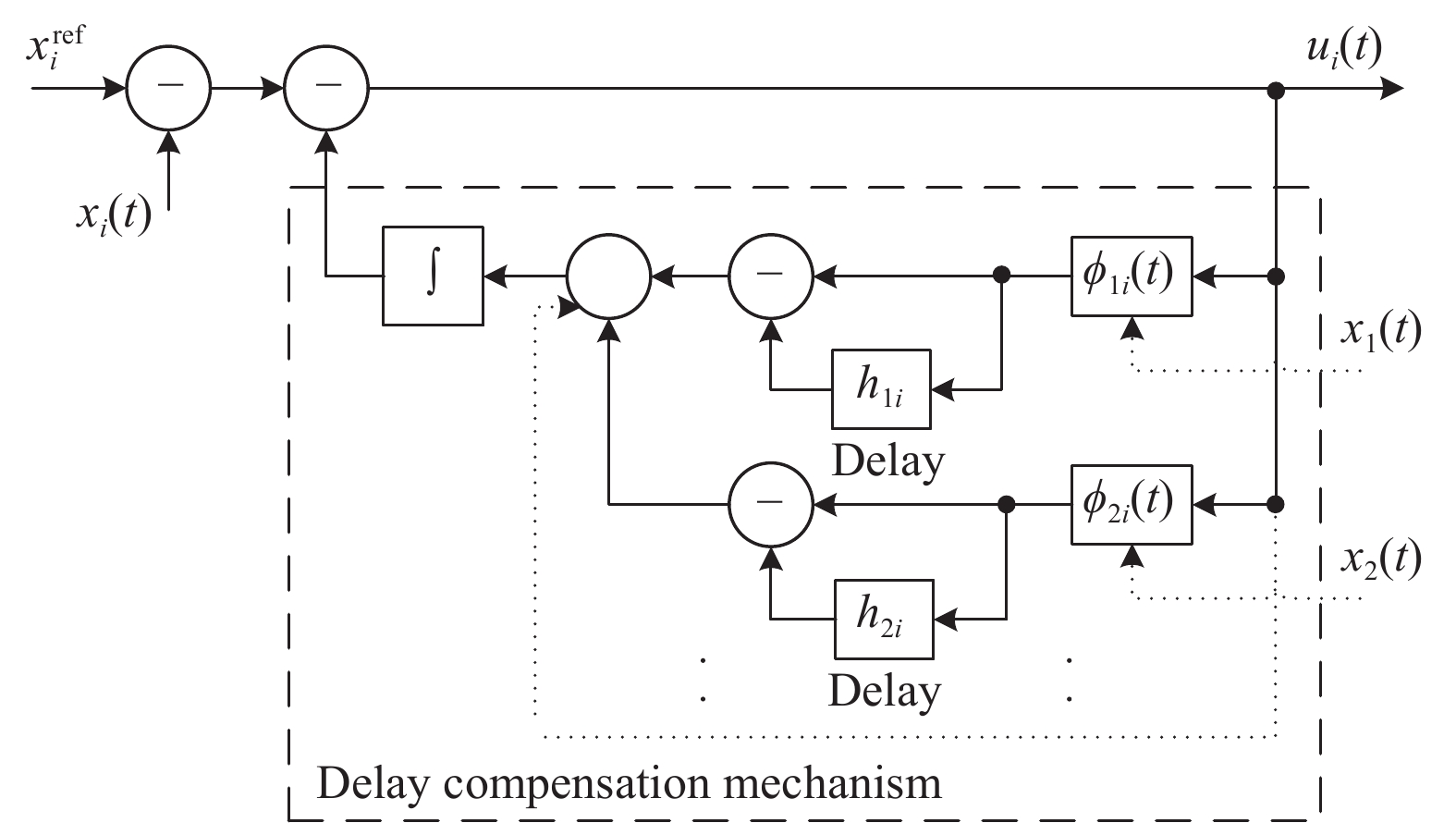
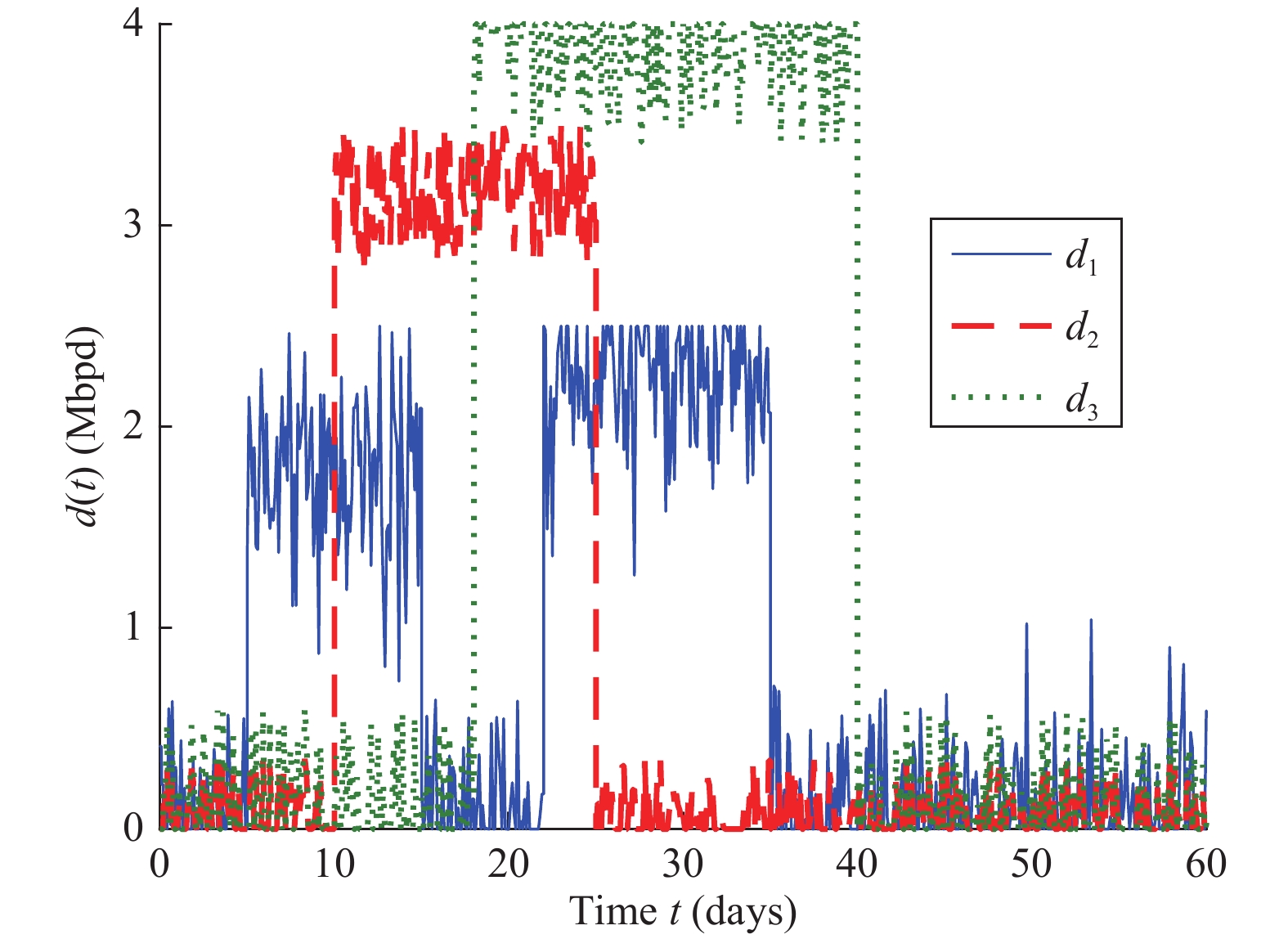
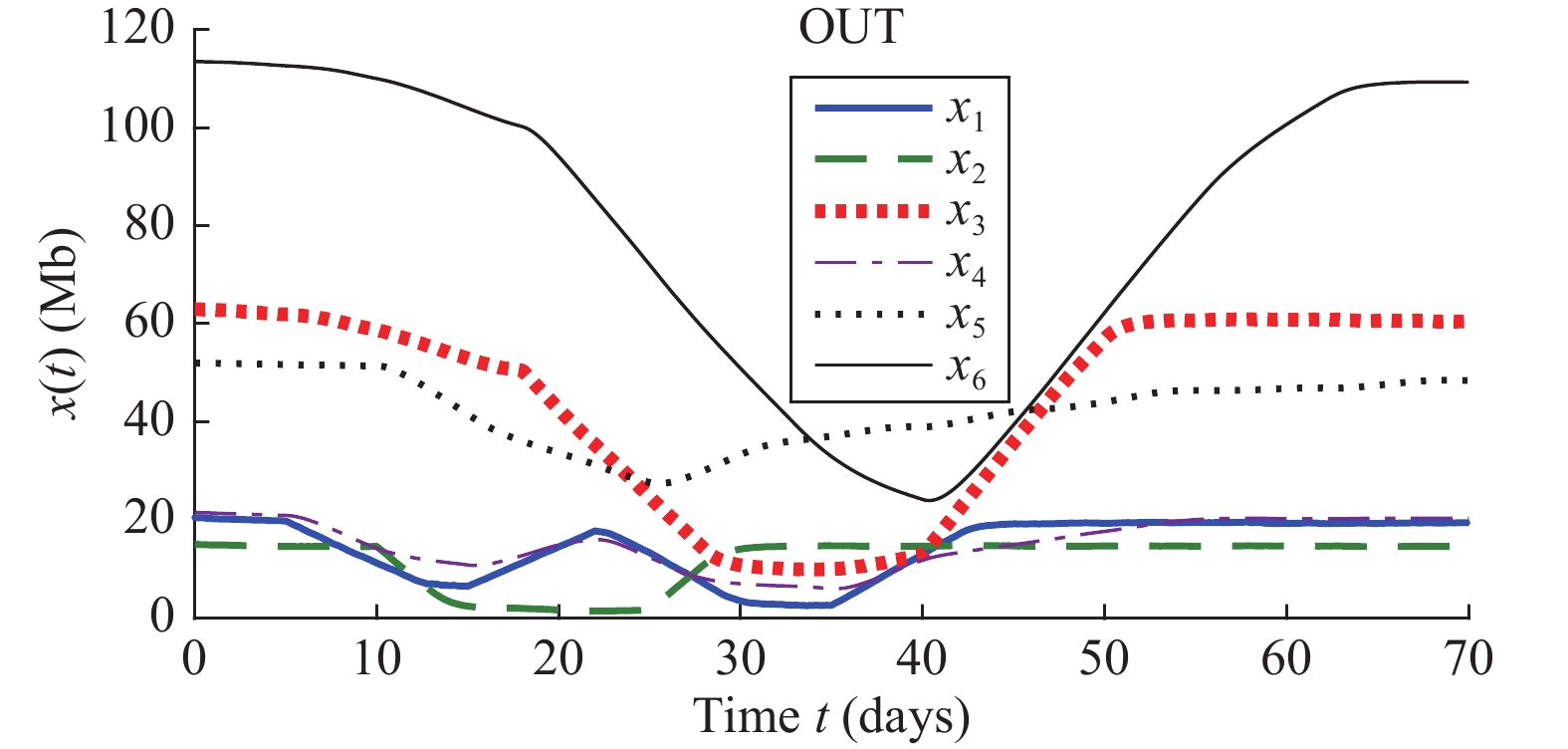
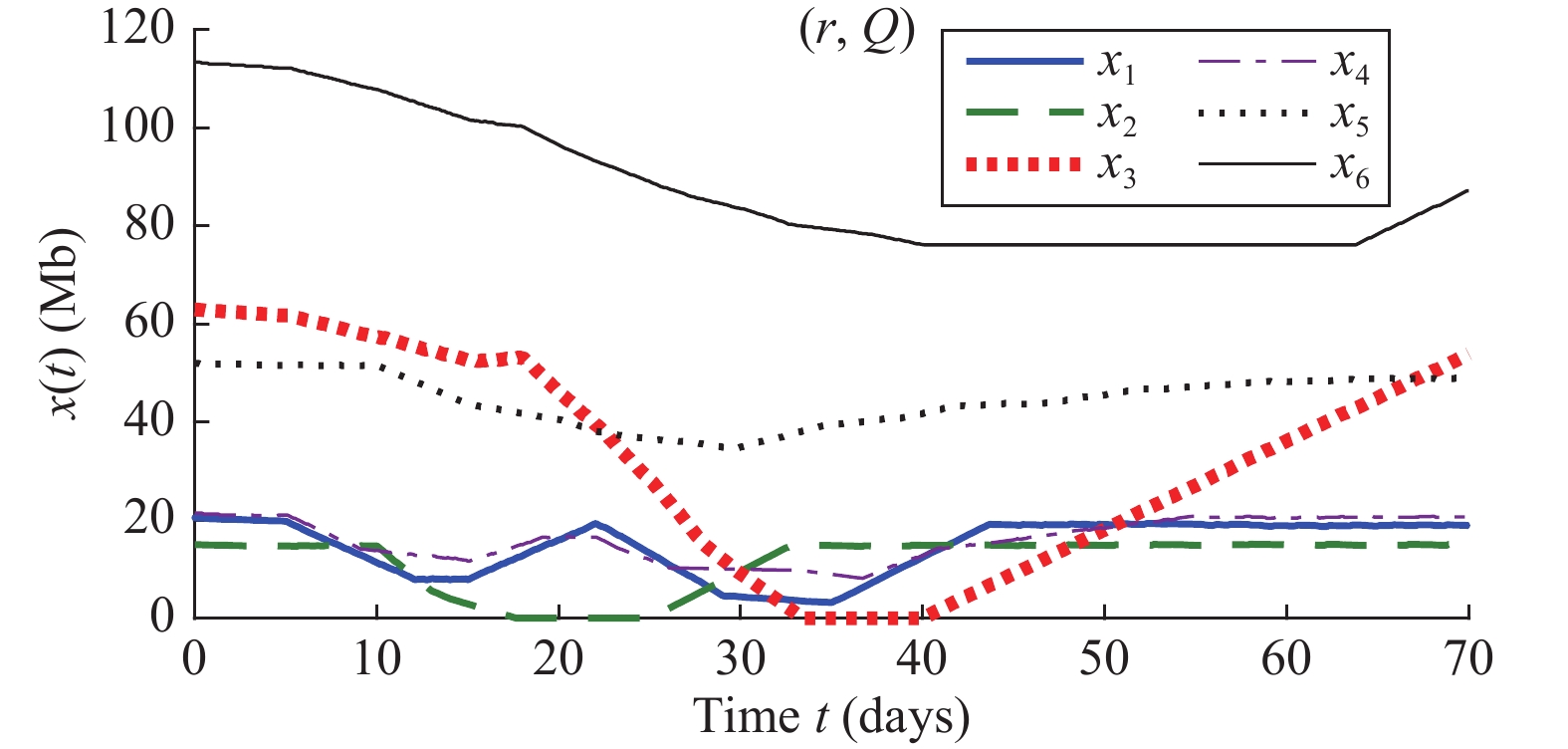
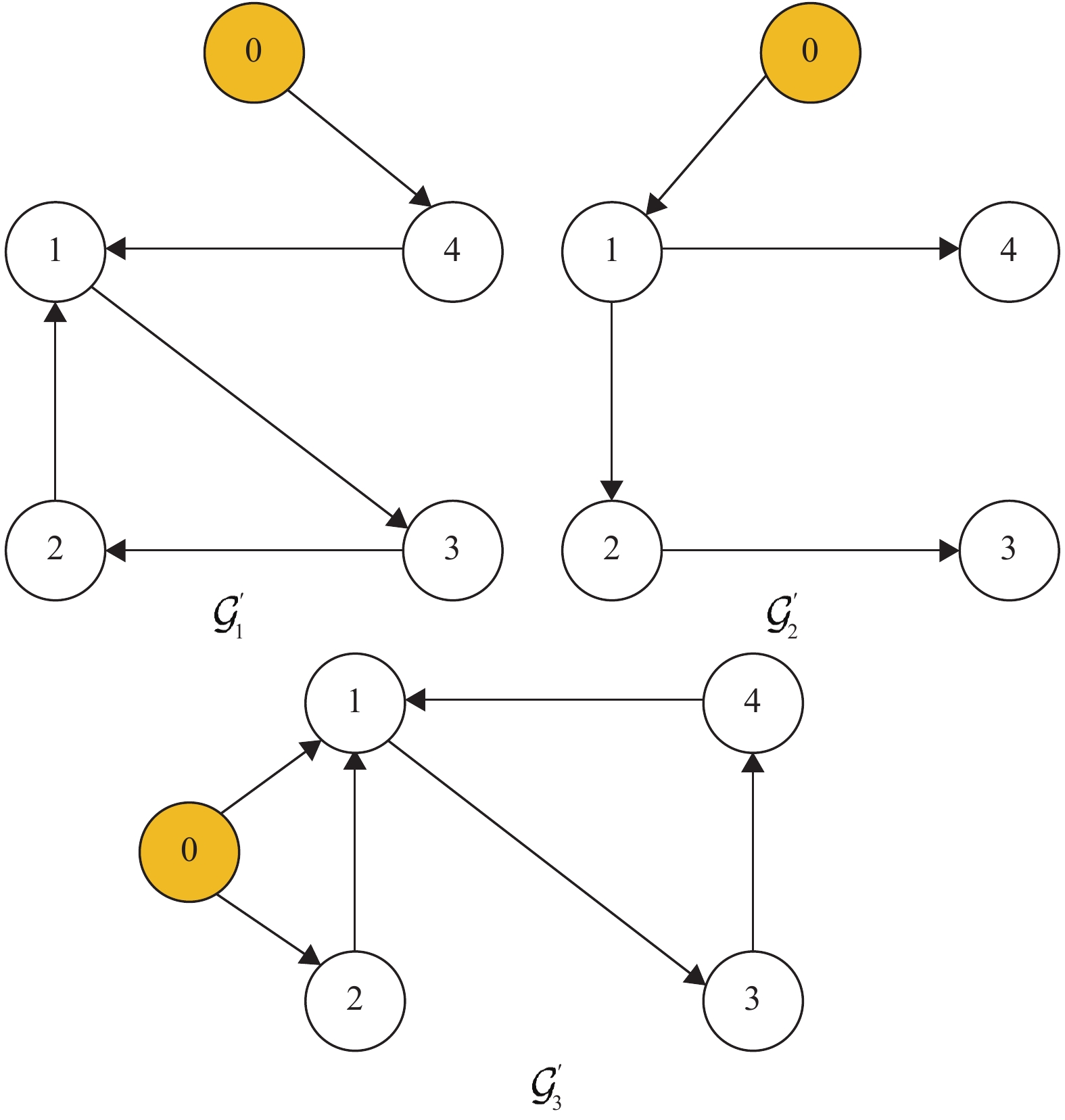
In this work, the dynamics of networked goods distribution systems subject to the control of a continuous-review order-up-to inventory policy are investigated. In the analytical study, as opposed to the earlier models constrained to the serial and arborescent interconnection structures, an arbitrary multi-echelon topology is considered. This external, uncertain demand, following any distribution, may be imposed on all network nodes, not just conveniently selected contact points. As in the physical systems, stock relocation to refill the reserves is subject to non-negligible delay, which poses a severe stability threat and may lead to cost-inefficient decisions. A state-space model is created and used as the framework for analyzing system properties. In particular, it is formally demonstrated that despite unpredictable demand fluctuations, a feasible (nonnegative and bounded) reserves replenishment signal is generated at all times, and the stock gathered at the nodes does not surpass a finite, precisely determined level. The theoretical content is illustrated with a case study of the Chinese oil supply system.








 E-mail Alert
E-mail Alert