A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 13
Issue 4
Volume 13
Issue 4
IEEE/CAA Journal of Automatica Sinica
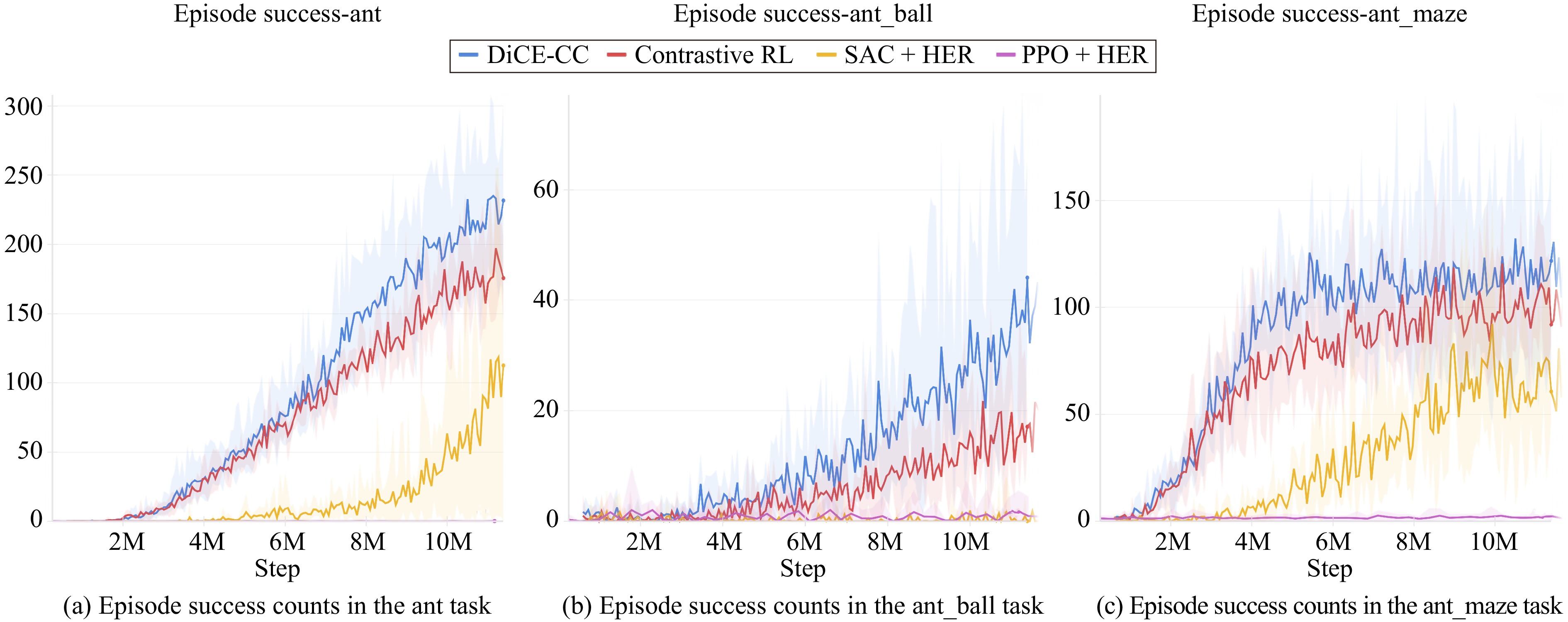
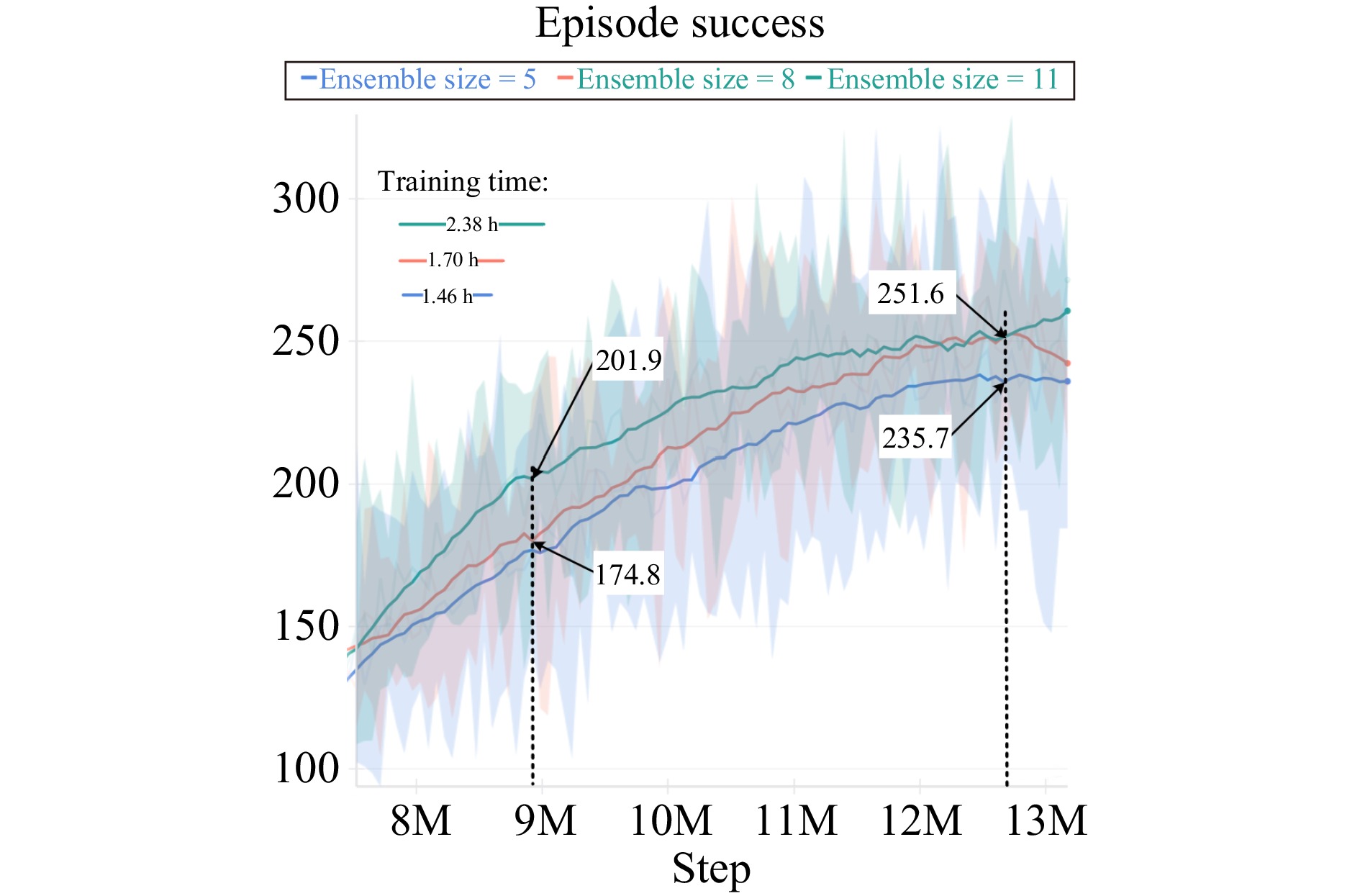
| Citation: | Z. Shi, R. Zhu, S. Wu, W. Tong, G. Zhu, and E. Wu, “Diversity-driven contrastive value ensembles with categorical constraints for goal-conditioned robotic control,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 4, pp. 1001–1003, Apr. 2026. doi: 10.1109/JAS.2025.125885

|

| [1] |
X. Sun, J. Li, A. V. Kovalenko, W. Feng, and Y. Ou, “Integrating reinforcement learning and learning from demonstrations to learn nonprehensile manipulation,” IEEE Trans. Autom. Sci. Eng., vol. 20, no. 3, pp. 1735–1744, July 2023. doi: 10.1109/TASE.2022.3185071
|
| [2] |
Q. Zou and E. Suzuki, “Compact goal representation learning via information bottleneck in goal-conditioned reinforcement learning,” IEEE Trans. Neural Netw. Learn. Syst., vol. 36, no. 2, pp. 2368–2381, Feb. 2025. doi: 10.1109/TNNLS.2023.3344880
|
| [3] |
M. Andrychowicz, F. Wolski, A. Ray, et al., “Hindsight experience replay,” in Proc. Adv. Neural Inf. Process. Syst. 2017, pp. 5048–5058.
|
| [4] |
B. Eysenbach, T. Zhang, S. Levine, and R. R. Salakhutdinov, “Contrastive learning as goal-conditioned reinforcement learning,” in Proc. Adv. Neural Inf. Process. Syst. 2022, vol. 35, pp. 35603–35620.
|
| [5] |
H. Sikchi, R. Chitnis, A. Touati, A. Geramifard, A. Zhang, and S. Niekum, “SMORE: Score models for offline goal-conditioned reinforcement learning”, arXiv preprint arXiv: 2311.02013, 2023.
|
| [6] |
G. Wang, M. Xin, W. Wu, Z. Liu, and H. Wang, “Learning of long-horizon sparse-Reward robotic manipulator tasks with base controllers,” IEEE Trans. Neural Netw. Learn. Syst. vol. 35, no. 3, pp. 4072–4081, Mar. 2024. doi: 10.1109/TNNLS.2022.3201705
|
| [7] |
G. An, S. Moon, J. Kim, and H. O. Song. “Uncertainty-based offline reinforcement learning with diversified q-ensemble,” in Proc. Adv. Neural Inf. Process. Syst. 2021, vol. 34, pp. 7436–7447.
|
| [8] |
M. Bortkiewicz, W. Pałucki, V. Myers, et al. “Accelerating goal-conditioned reinforcement learning algorithms and research” arXiv preprint arXiv: 2408.11052, 2025.
|
Figures(3) / Tables(2)






 DownLoad:
DownLoad: