A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 13
Issue 4
Volume 13
Issue 4
IEEE/CAA Journal of Automatica Sinica
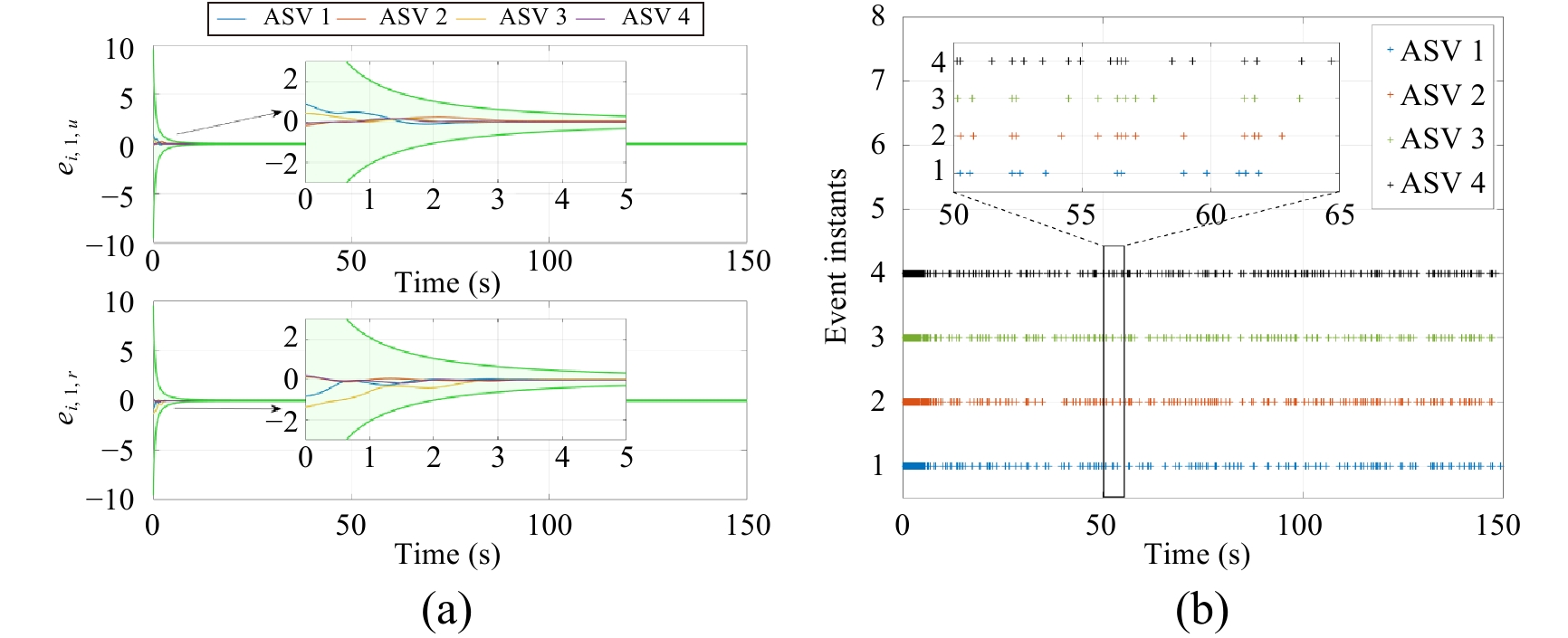
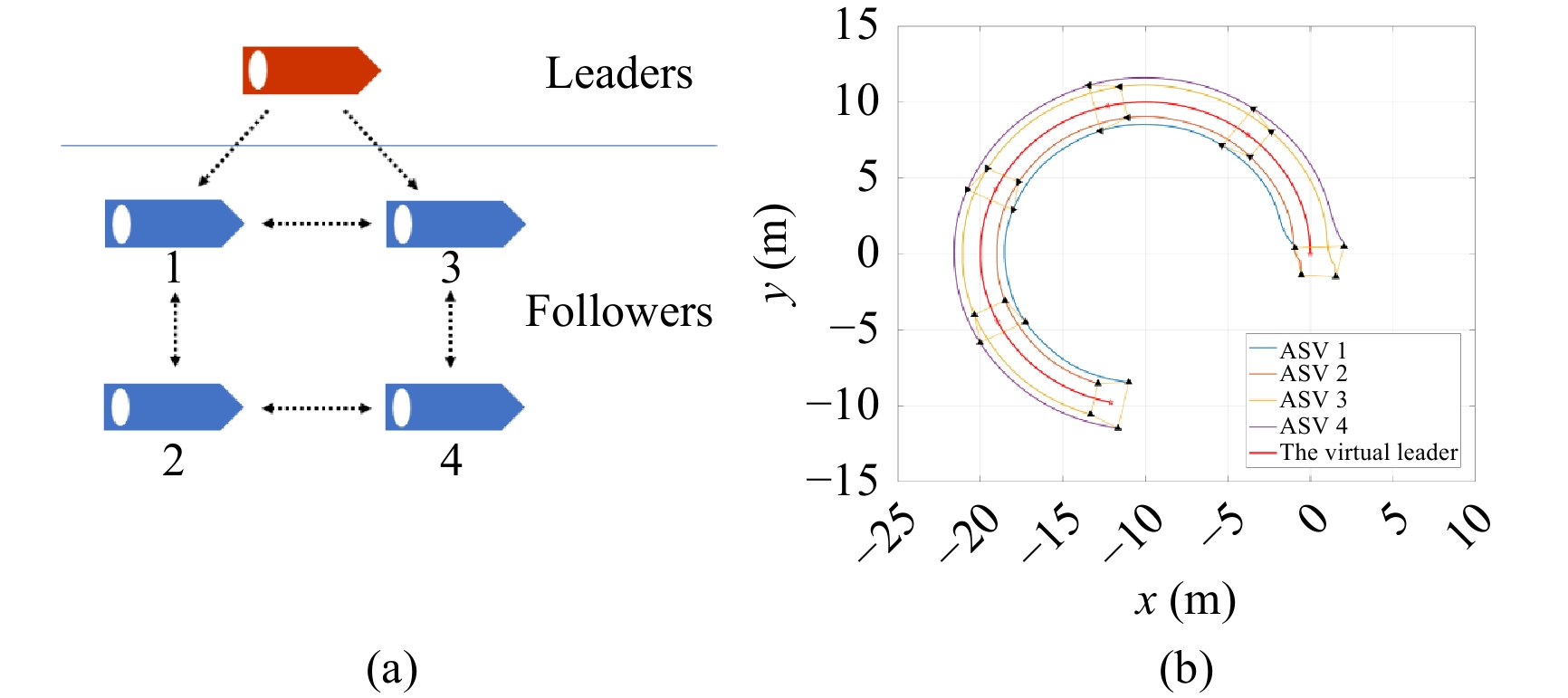
| Citation: | S. Yao, Z. Feng, and H. Du, “Dynamic event-triggered optimized formation control for ASVs with prescribed performance,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 4, pp. 998–1000, Apr. 2026. doi: 10.1109/JAS.2025.125681

|

| [1] |
L. Ma, Y.-L. Wang, and Q.-L. Han, “Cooperative target tracking of multiple autonomous surface vehicles under switching interaction topologies,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 673–684, 2023. doi: 10.1109/JAS.2022.105509
|
| [2] |
C. Wang, Y. Wang, Q.-L. Han, and Y. Wu, “MUTS-based cooperative target stalking for a multi-USV system,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 7, pp. 1582–1592, 2023. doi: 10.1109/JAS.2022.106007
|
| [3] |
J.-X. Zhang and T. Chai, “Singularity-free continuous adaptive control of uncertain underactuated surface vessels with prescribed performance,” IEEE Trans. Syst. Man Cybern. Syst., vol. 52, no. 9, pp. 5646–5655, 2022.
|
| [4] |
J.-X. Zhang, T. Yang, and T. Chai, “Neural network control of underactuated surface vehicles with prescribed trajectory tracking performance,” IEEE Trans. Neural Netw. Learn. Syst., vol. 35, no. 6, pp. 8026–8039, 2024. doi: 10.1109/TNNLS.2022.3223666
|
| [5] |
L. Chen, S.-L. Dai, and C. Dong, “Adaptive optimal tracking control of an underactuated surface vessel using actor–critic reinforcement learning,” IEEE Trans. Neural Netw. Learn. Syst., vol. 35, no. 6, pp. 7520–7533, 2024. doi: 10.1109/TNNLS.2022.3214681
|
| [6] |
Y. Zhang, X. Liang, D. Li, S. S. Ge, B. Gao, H. Chen, and T. H. Lee, “Adaptive safe reinforcement learning with full-state constraints and constrained adaptation for autonomous vehicles,” IEEE Trans. Cybern., vol. 54, no. 3, pp. 1907–1920, 2024. doi: 10.1109/TCYB.2023.3283771
|
| [7] |
J. Qin, J. Du, and J. Li, “Adaptive finite-time trajectory tracking event-triggered control scheme for underactuated surface vessels subject to input saturation,” IEEE Trans. Intell. Transp. Syst., vol. 24, no. 8, pp. 8809–8819, 2023. doi: 10.1109/TITS.2023.3256094
|
| [8] |
W. Zhou, J. Fu, H. Yan, X. Du, Y. Wang, and H. Zhou, “Event-triggered approximate optimal path-following control for unmanned surface vehicles with state constraints,” IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 1, pp. 104–118, 2023.
|
| [9] |
Z. Feng and S. Yao, “Dynamic event-triggered active disturbance rejection formation control for constrained underactuated AUVs,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 2, pp. 460–462, 2025. doi: 10.1109/JAS.2024.124617
|
Figures(2) / Tables(3)






 DownLoad:
DownLoad: