A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 7
Volume 11
Issue 7
IEEE/CAA Journal of Automatica Sinica
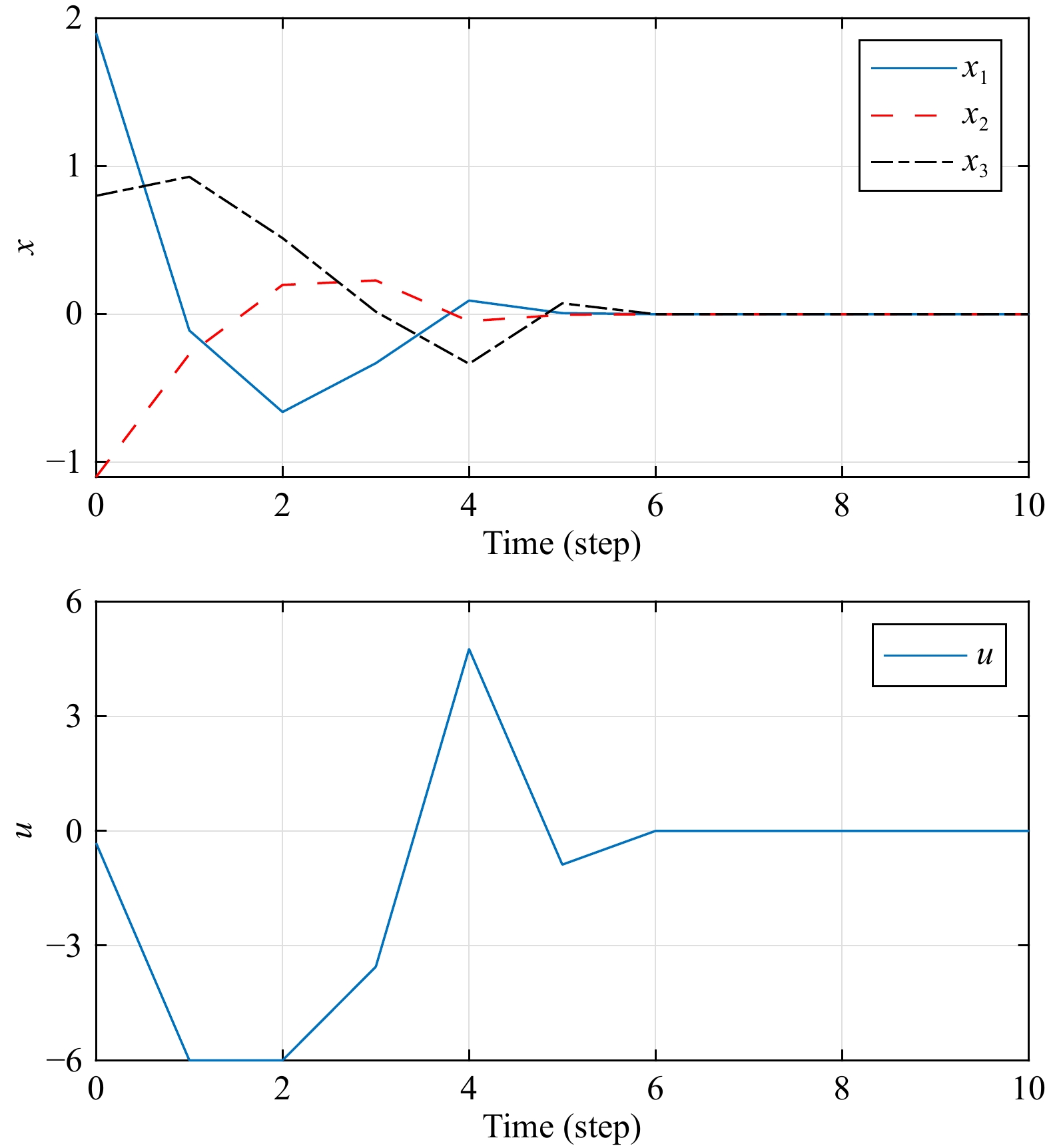
| Citation: | B. Zhu, X. Yuan, L. Dai, and Z. Qiang, “Finite-time stabilization for constrained discrete-time systems by using model predictive control,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 7, pp. 1656–1666, Jul. 2024. doi: 10.1109/JAS.2024.124212

|
In this paper, a model predictive control (MPC) framework is proposed for finite-time stabilization of linear and nonlinear discrete-time systems subject to state and control constraints. The proposed MPC framework guarantees the finite-time convergence property by assigning the control horizon equal to the dimension of the overall system, and only penalizing the terminal cost in the optimization, where the stage costs are not penalized explicitly. A terminal inequality constraint is added to guarantee the feasibility and stability of the closed-loop system. Initial feasibility can be improved via augmentation. The finite-time convergence of the proposed MPC is proved theoretically, and is supported by simulation examples.

| [1] |
R. E. Kalman, “On the general theory of control systems,” IFAC Proc. Volumes, vol. 1, no. 1, pp. 491–502, 1960. doi: 10.1016/S1474-6670(17)70094-8
|
| [2] |
X. Meng, H. Yu, J. Zhang, and K. Yan, “Optimized control strategy based on EPCH and DBMP algorithms for quadruple-tank liquid level system,” J. Process Control, vol. 110, pp. 121–132, 2022. doi: 10.1016/j.jprocont.2021.12.008
|
| [3] |
J. Chen, Y. Fan, M. Cheng, Q. Zhang, and Q. Chen, “Parameter-free ultralocal model-based deadbeat predictive current control for PMVMS using finite-time gradient method,” IEEE Trans. Industrial Electronics, vol. 70, no. 6, pp. 5549–5559, 2023. doi: 10.1109/TIE.2022.3196367
|
| [4] |
K. Yu, Z. Wang, W. Hua, and M. Cheng, “Robust cascaded deadbeat predictive control for dual three-phase variable-flux PMSM considering intrinsic delay in speed loop,” IEEE Trans. Industrial Electronics, vol. 69, no. 12, pp. 12107–12118, 2022. doi: 10.1109/TIE.2022.3142400
|
| [5] |
B. Picasso, D. D. Vito, R. Scattolini, and P. Colaneri, “An MPC approach to the design of two-layer hierarchical control systems,” Automatica, vol. 46, no. 5, pp. 823–831, 2010. doi: 10.1016/j.automatica.2010.02.013
|
| [6] |
A. Ansari and D. S. Bernstein, “Deadbeat unknown-input state estimation and input reconstruction for linear discrete-time systems,” Automatica, vol. 103, pp. 11–19, 2019. doi: 10.1016/j.automatica.2019.01.011
|
| [7] |
Q. C. Zhong, “Control of integral processes with dead time—Part 3: Deadbeat disturbance response,” IEEE Trans. Autom. Control, vol. 48, no. 1, pp. 153–159, 2003. doi: 10.1109/TAC.2002.806670
|
| [8] |
B. Zhu, Z. Zheng, and X. Xia, “Constrained adaptive model-predictive control for a class of discrete-time linear systems with parametric uncertainties,” IEEE Trans. Autom. Control, vol. 65, no. 5, pp. 2223–2229, 2020. doi: 10.1109/TAC.2019.2939659
|
| [9] |
K. Huang, K. Wei, F. Li, C. Yang, and W. Gui, “LSTM-MPC: A deep learning based predictive control method for multimode process control,” IEEE Trans. Industrial Electronics, vol. 70, no. 11, pp. 11544–11554, 2023. doi: 10.1109/TIE.2022.3229323
|
| [10] |
K. Huang, Z. Tao, Y. Liu, D. Wu, C. Yang, and W. Gui, “Errortriggered adaptive sparse identification for predictive control and its application to multiple operating conditions processes,” IEEE Trans. Neural Networks and Learning Systems, pp. 1–14, 2023.
|
| [11] |
J. O’Reilly, “The discrete linear time invariant time-optimal control problem—An overview,” Automatica, vol. 17, no. 2, pp. 363–370, 1981. doi: 10.1016/0005-1098(81)90053-4
|
| [12] |
V. Kucera and M. Sebek, “On deadbeat controllers,” IEEE Trans. Autom. Control, vol. 29, no. 8, pp. 719–722, 1984. doi: 10.1109/TAC.1984.1103621
|
| [13] |
B. Leden, “Dead-beat control and the riccati equation,” IEEE Trans. Autom. Control, vol. 21, no. 5, pp. 791–792, 1976. doi: 10.1109/TAC.1976.1101318
|
| [14] |
F. Lewis, “A generalized inverse solution to the discrete-time singular riccati equation,” IEEE Trans. Autom. Control, vol. 26, no. 2, pp. 395–398, 1981. doi: 10.1109/TAC.1981.1102599
|
| [15] |
A. Emami-Naeini and G. Franklin, “Deadbeat control and tracking of discrete-time systems,” IEEE Trans. Autom. Control, vol. 27, no. 1, pp. 176–181, 1982. doi: 10.1109/TAC.1982.1102818
|
| [16] |
K. Sugimoto, A. Inoue, and S. Masuda, “A direct computation of state deadbeat feedback gains,” IEEE Trans. Autom. Control, vol. 38, no. 8, pp. 1283–1284, 1993. doi: 10.1109/9.233169
|
| [17] |
W. M. Haddad and J. Lee, “Finite-time stability of discrete autonomous systems,” Automatica, vol. 122, p. 109282, 2020. doi: 10.1016/j.automatica.2020.109282
|
| [18] |
S. E. Tuna, “State deadbeat control of nonlinear systems: Construction via sets,” Automatica, vol. 48, no. 9, pp. 2201–2206, 2012. doi: 10.1016/j.automatica.2012.06.017
|
| [19] |
J. Wing and C. A. Desoer, “The multiple input minimal time regulator problem (general theory),” IEEE Trans. Autom. Control, vol. 8, no. 2, pp. 125–136, 1963. doi: 10.1109/TAC.1963.1105535
|
| [20] |
S.-W. Kang, J.-H. Soh, and R.-Y. Kim, “Symmetrical three-vector-based model predictive control with deadbeat solution for IPMSM in rotating reference frame,” IEEE Trans. Industrial Electronics, vol. 67, no. 1, pp. 159–168, 2019.
|
| [21] |
J. Kreiss, M. Bodson, R. Delpoux, J.-Y. Gauthier, J.-F. Trégouët, and X. Lin-Shi, “Optimal control allocation for the parallel interconnection of buck converters,” Control Engineering Practice, vol. 109, p. 104727, 2021. doi: 10.1016/j.conengprac.2021.104727
|
| [22] |
P. Wang, Y. Bi, F. Gao, T. Song, and Y. Zhang, “An improved deadbeat control method for single-phase PWM rectifiers in charging system for evs,” IEEE Trans. Vehicular Technology, vol. 68, no. 10, pp. 9672–9681, 2019. doi: 10.1109/TVT.2019.2937653
|
| [23] |
J.-N. Juang and M. Phan, “Deadbeat predictive controllers,” Tech. Rep., 1997.
|
| [24] |
J. M. Maciejowksi, “Predictive control with constraints,” Prentice Hall, 2000.
|
| [25] |
C. V. Rao, “Sparsity of linear discrete-time optimal control problems with l1 objectives,” IEEE Trans. Autom. Control, 2018.
|
| [26] |
C. V. Rao and J. B. Rawlings, “Linear programming and model predictive control,” J. Process Control, vol. 10, no. 2, pp. 283–289, 2000.
|
| [27] |
S. D. Cairano and A. Bemporad, “Model predictive control tuning by controller matching,” IEEE Trans. Autom. Control, vol. 55, no. 1, pp. 185–190, 2010. doi: 10.1109/TAC.2009.2033838
|
| [28] |
X. Cheng and B. Krogh, “Stability-constrained model predictive control,” IEEE Trans. Autom. Control, vol. 46, no. 11, pp. 1816–1820, 2001. doi: 10.1109/9.964698
|
| [29] |
X. Cheng and B. Krogh, “Stability constrained model predictive control for nonlinear systems,” in Proc. 36th IEEE Conf. Decision and Control, vol. 3, 1997, pp. 2091–2096.
|
| [30] |
R. L. Sutherland, I. V. Kolmanovsky, A. R. Girard, F. A. Leve, and C. D. Petersen, “On closed-loop lyapunov stability with minimum-time mpc feedback laws for discrete-time systems,” in Proc. IEEE 58th Conf. Decision and Control. 2019, pp. 5231–5237.
|
| [31] |
T. Cunis and I. Kolmanovsky, “Viability, viscosity, and storage functions in model-predictive control with terminal constraints,” Automatica, vol. 131, p. 109748, 2021. doi: 10.1016/j.automatica.2021.109748
|
| [32] |
F. Blanchini and S. Miani, Set-Theoretic Methods in Control. Springer, 2008, vol. 78.
|
| [33] |
W. M. Wonham, Linear Multivariable Control: A Geometric Approach. Springer-Verlag, 1974.
|
| [34] |
L. Zhang, S. Zhuang, and R. D. Braatz, “Switched model predictive control of switched linear systems: Feasibility, stability and robustness,” Automatica, vol. 67, pp. 8–21, 2016. doi: 10.1016/j.automatica.2016.01.010
|
| [35] |
E. Aranda-Bricaire, Ü. Kotta, and C. H. Moog, “Linearization of discrete-time systems,” SIAM J. Control and Optimization, vol. 34, no. 6, pp. 1999–2023, 1996. doi: 10.1137/S0363012994267315
|
| [36] |
J. Grizzle and P. Kokotovic, “Feedback linearization of sampled-data systems,” IEEE Trans. Autom. Control, vol. 33, no. 9, pp. 857–859, 1988. doi: 10.1109/9.1316
|
| [37] |
G. Jayaraman and H. Chizeck, “Feedback linearization of discrete-time systems,” in Proc. 32nd IEEE Conf. Decision and Control, 1993, pp. 2972–2977.
|
| [38] |
P. Sun, S. Li, B. Zhu, Z. Zuo, and X. Xia, “Vision-based fixed-time uncooperative aerial target tracking for UAV,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1322–1324, 2023. doi: 10.1109/JAS.2023.123510
|
| [39] |
Z. Luo, B. Zhu, J. Zheng, and Z. Zheng, “Robust distributed model predictive control for formation tracking of nonholonomic vehicles,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 560–562, 2024.
|
Figures(5)






 DownLoad:
DownLoad: