A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 5
Volume 11
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | M. Li and Z. Zeng, “Nested saturated control of uncertain complex cascade systems using mixed saturation levels,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 5, pp. 1163–1174, May 2024. doi: 10.1109/JAS.2023.124176

|
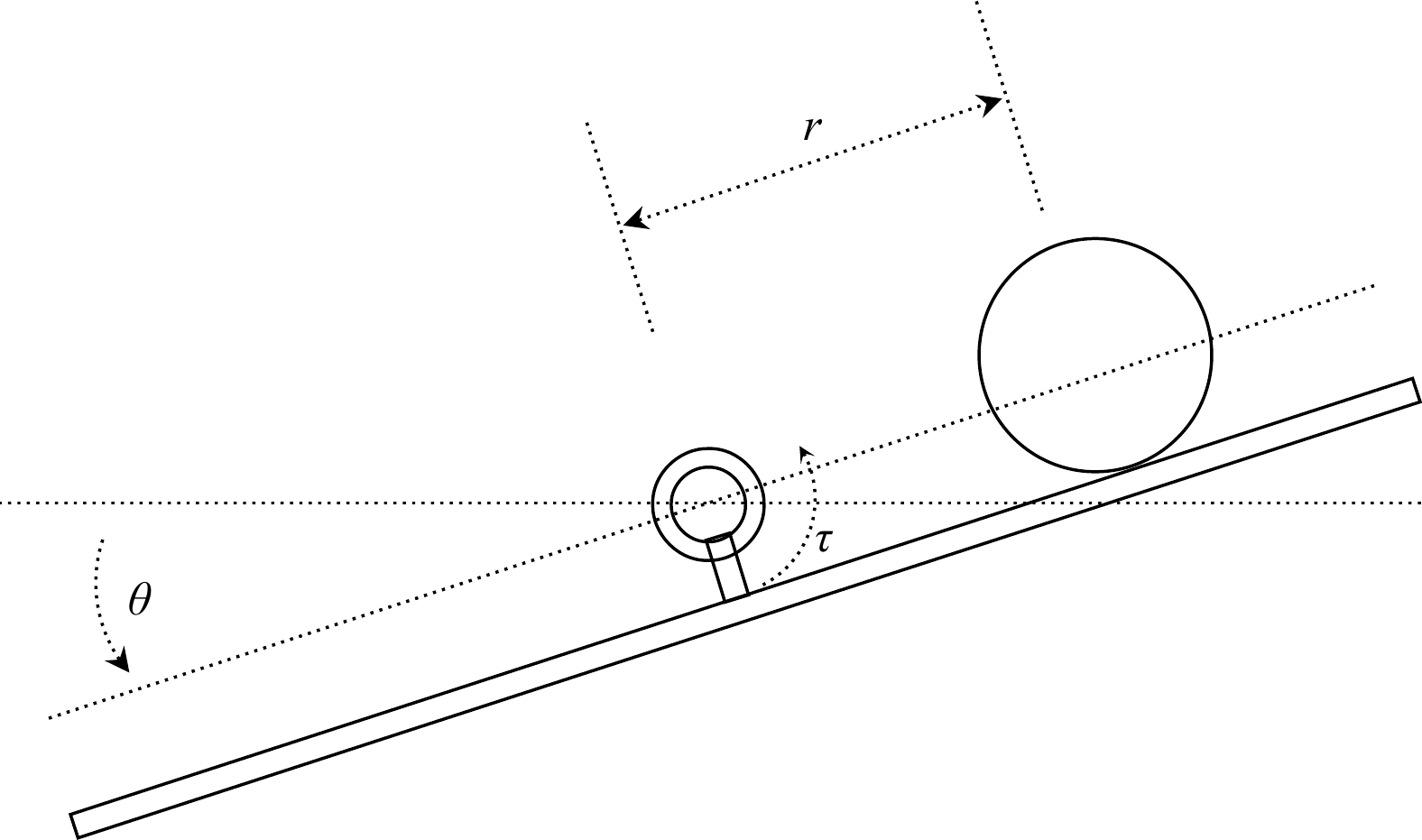
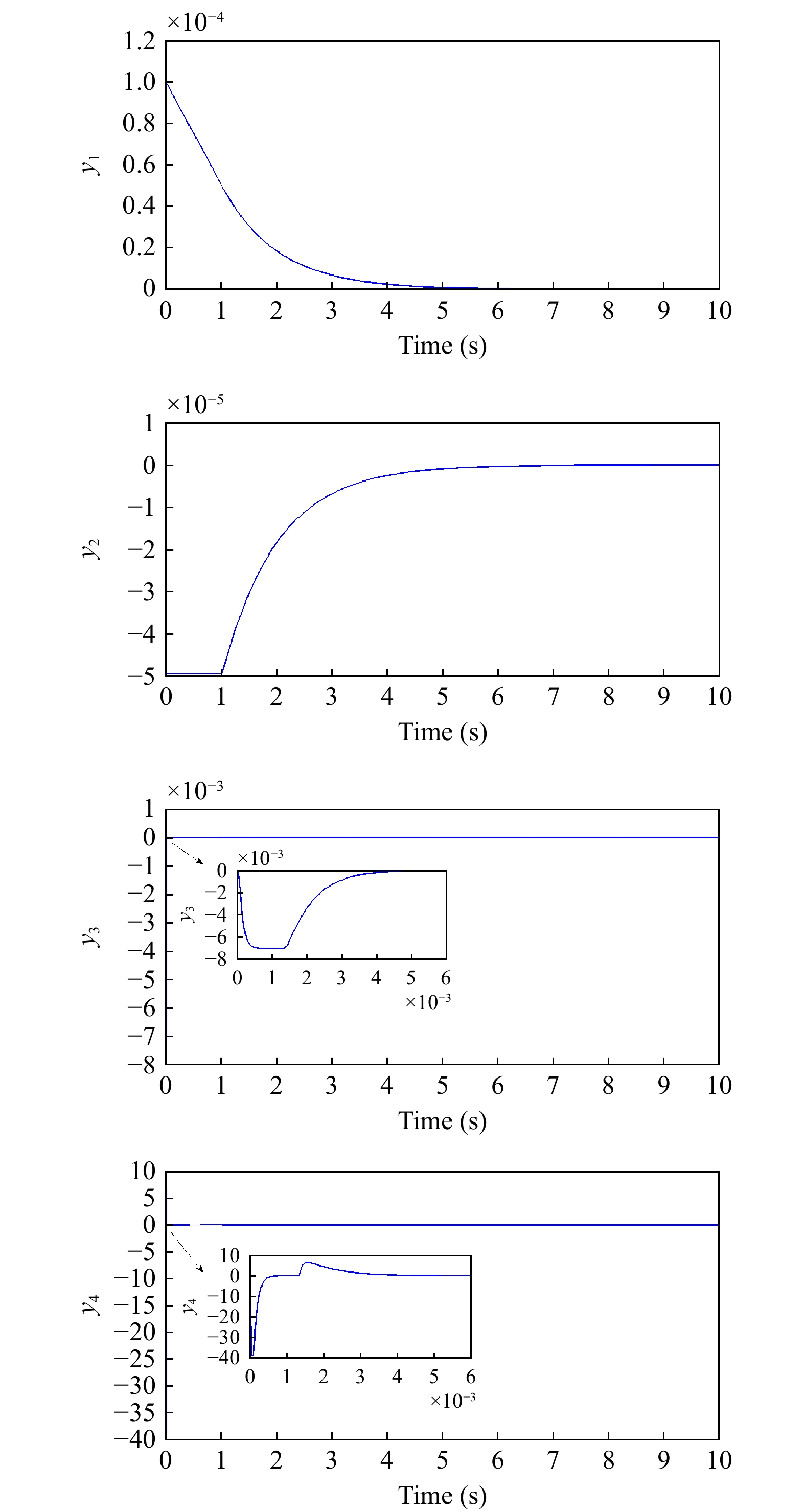
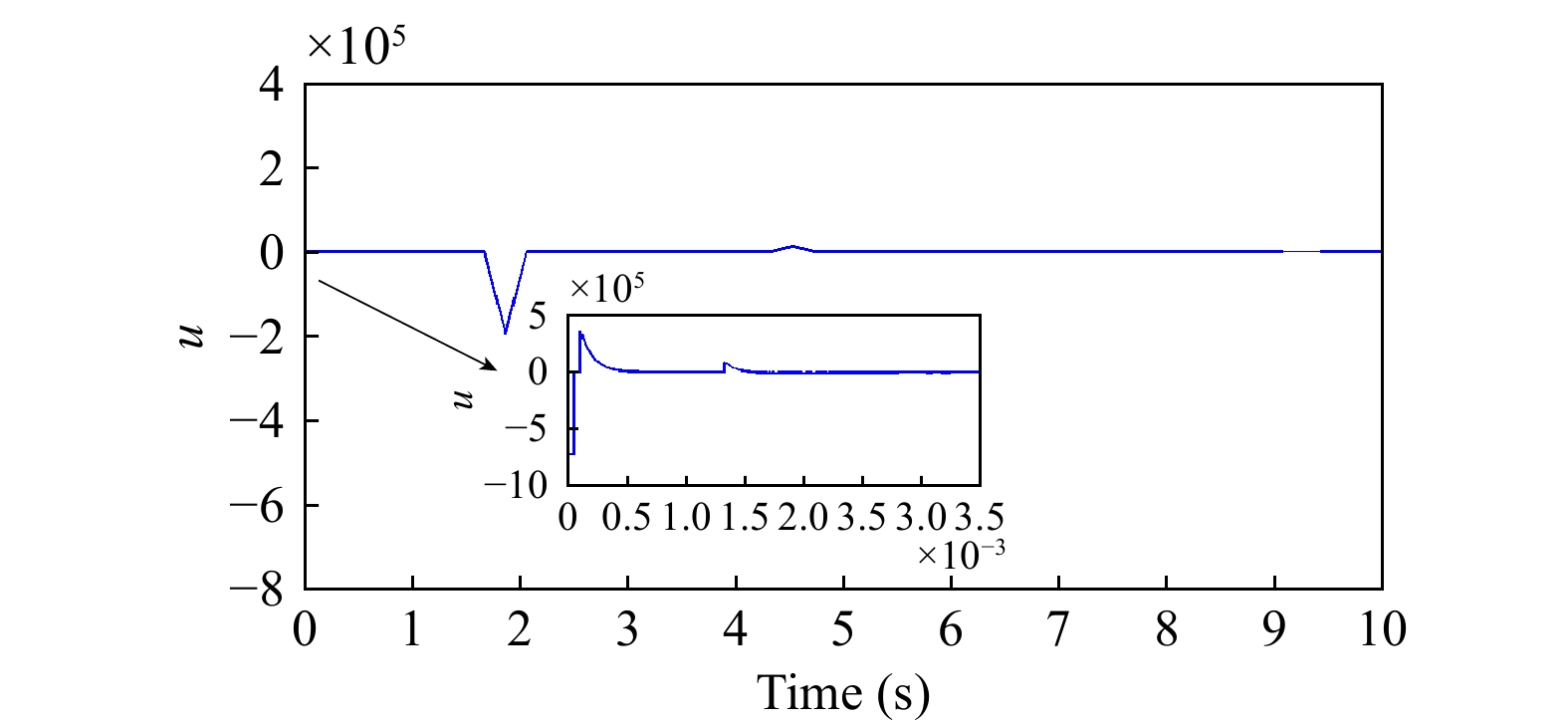
This study addresses the problem of global asymptotic stability for uncertain complex cascade systems composed of multiple integrator systems and non-strict feedforward nonlinear systems. To tackle the complexity inherent in such structures, a novel nested saturated control design is proposed that incorporates both constant saturation levels and state-dependent saturation levels. Specifically, a modified differentiable saturation function is proposed to facilitate the saturation reduction analysis of the uncertain complex cascade systems under the presence of mixed saturation levels. In addition, the design of modified differentiable saturation function will help to construct a hierarchical global convergence strategy to improve the robustness of control design scheme. Through calculation of relevant inequalities, time derivative of boundary surface and simple Lyapunov function, saturation reduction analysis and convergence analysis are carried out, and then a set of explicit parameter conditions are provided to ensure global asymptotic stability in the closed-loop systems. Finally, a simplified system of the mechanical model is presented to validate the effectiveness of the proposed method.

| [1] |
X. Niu, W. Lin, and X. Gao, “Static output feedback control of a chain of integrators with input constraints using multiple saturations and delays,” Automatica, vol. 125, p. 109457, Mar. 2021. doi: 10.1016/j.automatica.2020.109457
|
| [2] |
J. Zhang, K. Li, and Y. Li, “Output-feedback based simplified optimized backstepping control for strict-feedback systems with input and state constraints,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 6, pp. 1119–1132, Jun. 2021. doi: 10.1109/JAS.2021.1004018
|
| [3] |
M. Chen, S. S. Ge, and B. Ren, “Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints,” Automatica, vol. 47, no. 3, pp. 452–465, Mar. 2011. doi: 10.1016/j.automatica.2011.01.025
|
| [4] |
S. A. Emami, P. Castaldi, and A. Banazadeh, “Neural network-based flight control systems: Present and future,” Annu. Rev. Control, vol. 53, pp. 97–137, Jun. 2022. doi: 10.1016/j.arcontrol.2022.04.006
|
| [5] |
K. Zhang, B. Zhou, W. X. Zheng, and G.-R. Duan, “Event-triggered and self-triggered gain scheduled control of linear systems with input constraints,” IEEE Trans. Syst.,Man,Cybern.: Syst., vol. 52, no. 10, pp. 6452–6463, Oct. 2022. doi: 10.1109/TSMC.2022.3146191
|
| [6] |
Z. Zuo, X. Li, B. Ning, and Q.-L. Han, “Global finite-time stabilization of first-order systems with bounded controls,” IEEE Trans. Circuits Syst. II: Express Briefs, vol. 70, no. 7, pp. 2440–2444, Jul. 2023.
|
| [7] |
T. Hu and Z. Lin, Control Systems with Actuator Saturation: Analysis and Design. Boston, USA: Birkhäuser, 2001.
|
| [8] |
Y. Li and Z. Lin, Stability and Performance of Control Systems with Actuator Saturation. Cham, Germany: Birkhäuser, 2018.
|
| [9] |
Z. Lin, “Control design in the presence of actuator saturation: From individual systems to multi-agent systems,” Science China Information Sciences, vol. 62, no. 2, p. 26201, Feb. 2019. doi: 10.1007/s11432-018-9698-x
|
| [10] |
P. Li, J. Lam, R. Lu, and H. Li, “Variable-parameter-dependent saturated robust control for vehicle lateral stability,” IEEE Trans. Control Syst. Technol., vol. 30, no. 4, pp. 1711–1722, Jul. 2022. doi: 10.1109/TCST.2021.3121395
|
| [11] |
Z. Zuo, C. Liu, Q.-L. Han, and J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, Apr. 2022. doi: 10.1109/JAS.2022.105410
|
| [12] |
S. Ding and W. X. Zheng, “Robust control of multiple integrators subject to input saturation and disturbance,” Int. J. Control, vol. 88, no. 4, pp. 844–856, Apr. 2015. doi: 10.1080/00207179.2014.982710
|
| [13] |
M. Li and Z. Zeng, “Modified nested saturated control for uncertain multiple integrators with high-order nonlinear perturbation,” IEEE Trans. Cybern., vol. 54, no. 4, pp. 2086–2098, Apr. 2024. doi: 10.1109/TCYB.2022.3218849
|
| [14] |
H. Ye, M. Li, C. Yang, and W. Gui, “Finite-time stabilization of the double integrator subject to input saturation and input delay,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 5, pp. 1017–1024, Sept. 2018. doi: 10.1109/JAS.2018.7511177
|
| [15] |
A. R. Teel, “Global stabilization and restricted tracking for multiple integrators with bounded controls,” Syst. Control Lett., vol. 18, no. 3, pp. 165–171, Mar. 1992. doi: 10.1016/0167-6911(92)90001-9
|
| [16] |
M. Li, S. Ding, H. Ye, and J. Zhang, “Parameterisation of a special class of saturated controllers and application to mechanical systems,” IET Control Theory Appl., vol. 11, no. 17, pp. 3146–3155, Nov. 2017. doi: 10.1049/iet-cta.2017.0634
|
| [17] |
H. Ye, “Stabilization of uncertain feedforward nonlinear systems with application to underactuated systems,” IEEE Trans. Autom. Control, vol. 64, no. 8, pp. 3484–3491, Aug. 2019. doi: 10.1109/TAC.2018.2882479
|
| [18] |
F. Mazenc, S. Mondie, and R. Francisco, “Global asymptotic stabilization of feedforward systems with delay in the input,” IEEE Trans. Autom. Control, vol. 49, no. 5, pp. 844–850, May 2004. doi: 10.1109/TAC.2004.828313
|
| [19] |
S. Ding, C. Qian, and S. Li, “Global stabilization of a class of feedforward systems with lower-order nonlinearities,” IEEE Trans. Autom. Control, vol. 55, no. 3, pp. 691–696, Mar. 2010. doi: 10.1109/TAC.2009.2037455
|
| [20] |
L. Marconi and A. Isidori, “Robust global stabilization of a class of uncertain feedforward nonlinear systems,” Syst. Control Lett., vol. 41, no. 4, pp. 281–290, Nov. 2000. doi: 10.1016/S0167-6911(00)00066-9
|
| [21] |
B. Zhou and X. Yang, “Global stabilization of the multiple integrators system by delayed and bounded controls,” IEEE Trans. Autom. Control, vol. 61, no. 12, pp. 4222–4228, Dec. 2016. doi: 10.1109/TAC.2015.2513371
|
| [22] |
C. Barbu, R. Sepulchre, W. Lin, and P. V. Kokotovic, “Global asymptotic stabilization of the ball-and-beam system,” in Proc. 36th IEEE Conf. Decision and Control, San Diego, USA, 1997, pp. 2351–2355.
|
| [23] |
W. Lin and X. Li, “Synthesis of upper-triangular non-linear systems with marginally unstable free dynamics using state-dependent saturation,” Int. J. Control, vol. 72, no. 12, pp. 1078–1086, Feb. 1999. doi: 10.1080/002071799220434
|
| [24] |
R. Sepulchre, “Slow peaking and low-gain designs for global stabilization of nonlinear systems,” IEEE Trans. Autom. Control, vol. 45, no. 3, pp. 453–461, Mar. 2000. doi: 10.1109/9.847724
|
| [25] |
H. Ye, “Global stabilisation of complicated feedforward non-linear systems by constructing state-dependent saturation levels,” IET Control Theory Appl., vol. 10, no. 16, pp. 2071–2082, Oct. 2016. doi: 10.1049/iet-cta.2016.0172
|
| [26] |
J. Liu, H. Ye, and X. Qi, “Stabilization of benchmark under-actuated systems via saturated controls,” Int. J. Control,Autom. Syst., vol. 20, no. 11, pp. 3524–3539, Sept. 2022. doi: 10.1007/s12555-021-0583-1
|
| [27] |
M. Yuan and X. Zhang, “Stability and fast transient performance oriented motion control of a direct-drive system with modeling uncertainties, velocity, and input constraints,” IEEE/ASME Trans. Mechatron., vol. 27, no. 6, pp. 5926–5935, Dec. 2022. doi: 10.1109/TMECH.2022.3191201
|
| [28] |
S. Wu, T. Liu, M. Egerstedt, and Z.-P. Jiang, “Quadratic programming for continuous control of safety-critical multiagent systems under uncertainty,” IEEE Trans. Autom. Control, vol. 68, no. 11, pp. 6664–6674, Nov. 2023. doi: 10.1109/TAC.2023.3244745
|
| [29] |
M. Lin, B. Zhao, and D. Liu, “Event-triggered robust adaptive dynamic programming for multiplayer Stackelberg-Nash games of uncertain nonlinear systems,” IEEE Trans. Cybern., vol. 54, no. 1, pp. 273–286, Jan. 2024. doi: 10.1109/TCYB.2023.3251653
|
| [30] |
T. Liu, P. Zhang, M. Wang, and Z.-P. Jiang, “New results in stabilization of uncertain nonholonomic systems: An event-triggered control approach,” J. Syst. Sci. Complex., vol. 34, no. 5, pp. 1953–1972, Oct. 2021. doi: 10.1007/s11424-021-1235-5
|
| [31] |
W. Chen and Q. Hu, “Sliding-mode-based attitude tracking control of spacecraft under reaction wheel uncertainties,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 6, pp. 1475–1487, Jun. 2023. doi: 10.1109/JAS.2022.105665
|
| [32] |
C. Du, F. Li, Y. Shi, C. Yang, and W. Gui, “Integral event-triggered attack-resilient control of aircraft-on-ground synergistic turning system with uncertain tire cornering stiffness,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1276–1287, May 2023. doi: 10.1109/JAS.2023.123480
|
| [33] |
P. Yu, K.-Z. Liu, X. Liu, X. Li, M. Wu, and J. She, “Robust consensus tracking control of uncertain multi-agent systems with local disturbance rejection,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 427–438, Feb. 2023. doi: 10.1109/JAS.2023.123231
|
| [34] |
X. Ge, Q.-L. Han, Q. Wu, and X.-M. Zhang, “Resilient and safe platooning control of connected automated vehicles against intermittent denial-of-service attacks,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1234–1251, May 2023. doi: 10.1109/JAS.2022.105845
|
| [35] |
S. Gayaka, L. Lu, and B. Yao, “Global stabilization of a chain of integrators with input saturation and disturbances: A new approach,” Automatica, vol. 48, no. 7, pp. 1389–1396, Jul. 2012. doi: 10.1016/j.automatica.2011.11.012
|
| [36] |
S. Amini, B. Ahi, and M. Haeri, “Control of high order integrator chain systems subjected to disturbance and saturated control: A new adaptive scheme,” Automatica, vol. 100, pp. 108–113, Feb. 2019. doi: 10.1016/j.automatica.2018.10.039
|
| [37] |
J. Sun and W. Lin, “A dynamic gain-based saturation control strategy for feedforward systems with long delays in state and input,” IEEE Trans. Autom. Control, vol. 66, no. 9, pp. 4357–4364, Sept. 2021. doi: 10.1109/TAC.2020.3030744
|
| [38] |
J. Sun and W. Lin, “Non-identifier based adaptive regulation of feedforward systems with nonlinear parametrization and delays: A saturation control scheme,” Syst. Control Lett., vol. 173, p. 105456, Mar. 2023. doi: 10.1016/j.sysconle.2023.105456
|
| [39] |
A. Zavala-Río, I. Fantoni, and R. Lozano, “Global stabilization of a PVTOL aircraft model with bounded inputs,” Int. J. Control, vol. 76, no. 18, pp. 1833–1844, Oct. 2003. doi: 10.1080/00207170310001637147
|
| [40] |
S. Sastry, Nonlinear System: Analysis, Stability, and Control. New York, USA: Springer, 1999.
|
| [41] |
R. Ortega, M. W. Spong, F. Gomez-Estern, and G. Blankenstein, “Stabilization of a class of underactuated mechanical systems via interconnection and damping assignment,” IEEE Trans. Autom. Control, vol. 47, no. 8, pp. 1218–1233, Aug. 2002. doi: 10.1109/TAC.2002.800770
|
| [42] |
A. Sultangazin, L. Pannocchi, L. Fraile, and P. Tabuada, “Learning to control known feedback linearizable systems from demonstrations,” IEEE Trans. Autom. Control, vol. 69, no. 1, pp. 189–201, Jan. 2023. doi: 10.1109/TAC.2023.3272392
|
| [43] |
J. Huang and C.-F. Lin, “Robust nonlinear control of the ball and beam system,” in Proc. American Control Conf., Seattle, USA, pp. 306–310.
|
| [44] |
J. Hauser, S. Sastry, and P. Kokotovic, “Nonlinear control via approximate input-output linearization: The ball and beam example,” IEEE Trans. Autom. Control, vol. 37, no. 3, pp. 392–398, Mar. 1992. doi: 10.1109/9.119645
|
| [45] |
M. Ha, D. Wang, and D. Liu, “Novel discounted adaptive critic control designs with accelerated learning formulation,” IEEE Trans. Cybern., 2023. DOI: 10.1109/TCYB.2022.3233593
|
| [46] |
Z. Jin, A. Liu, W.-A. Zhang, L. Yu, and C.-Y. Su, “A learning based hierarchical control framework for human-robot collaboration,” IEEE Trans. Autom. Sci. Eng., vol. 20, no. 1, pp. 506–517, Jan. 2023. doi: 10.1109/TASE.2022.3161993
|
| [47] |
W. Sirichotiyakul and A. C. Satici, “Data-driven passivity-based control of underactuated mechanical systems via interconnection and damping assignment,” Int. J. Control, vol. 96, no. 6, pp. 1448–1456, Mar. 2023. doi: 10.1080/00207179.2022.2051750
|

Figures(4)






 DownLoad:
DownLoad: