A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 6
Volume 10
Issue 6
IEEE/CAA Journal of Automatica Sinica
| Citation: | H. H. Guo, M. Meng, and G. Feng, “Lyapunov-based output containment control of heterogeneous multi-agent systems with Markovian switching topologies and distributed delays,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 6, pp. 1421–1433, Jun. 2023. doi: 10.1109/JAS.2023.123198

|
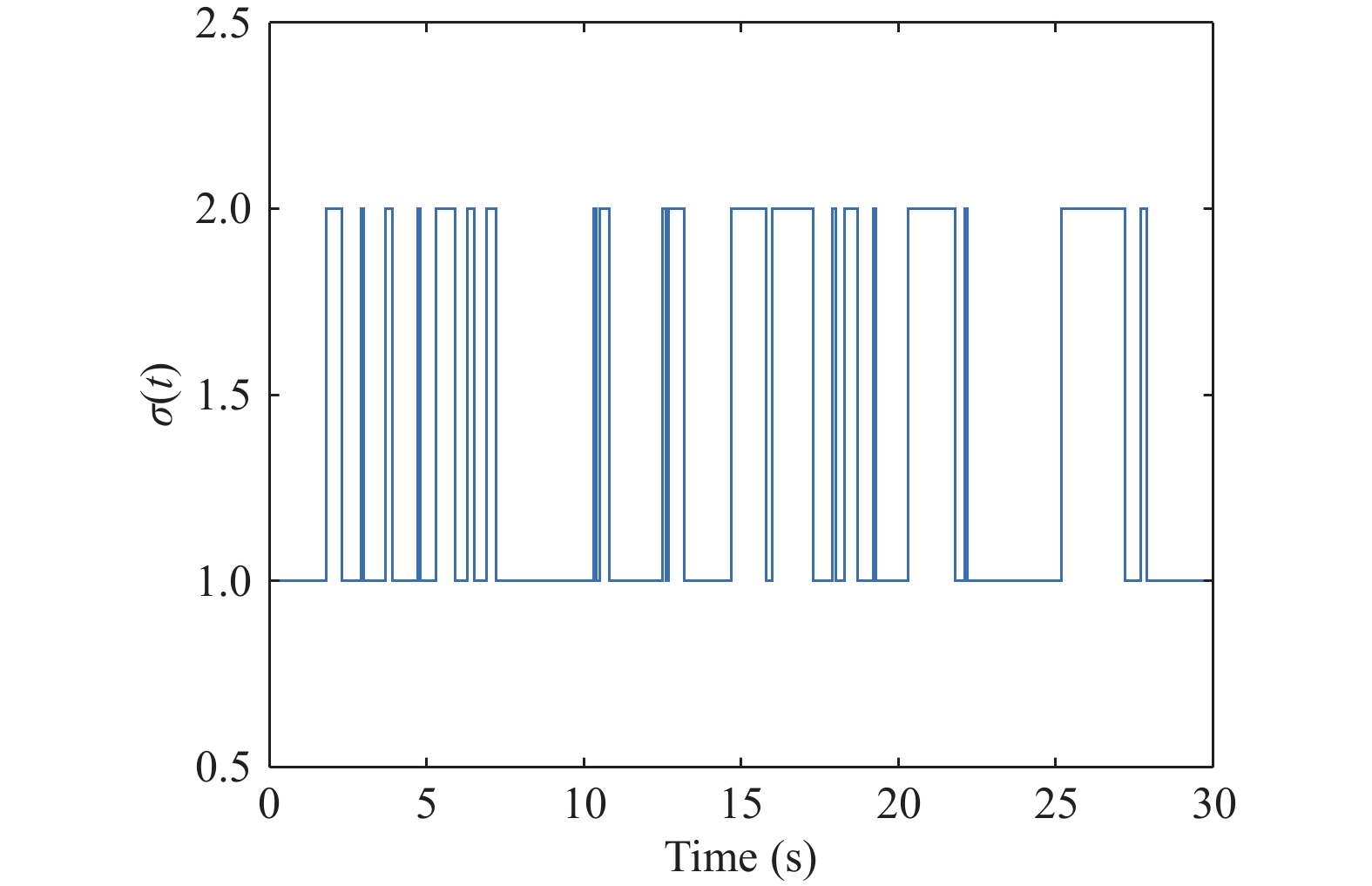
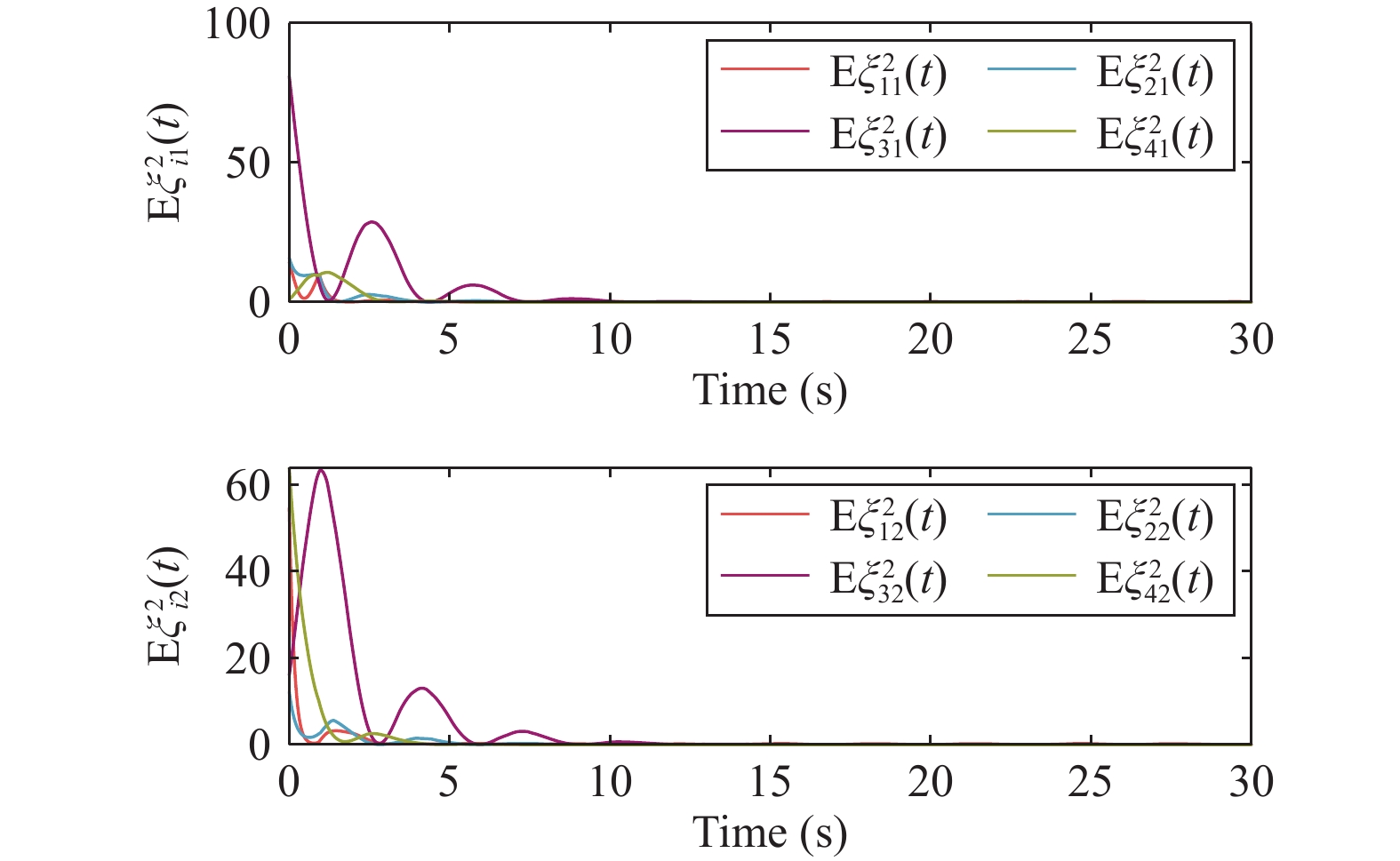
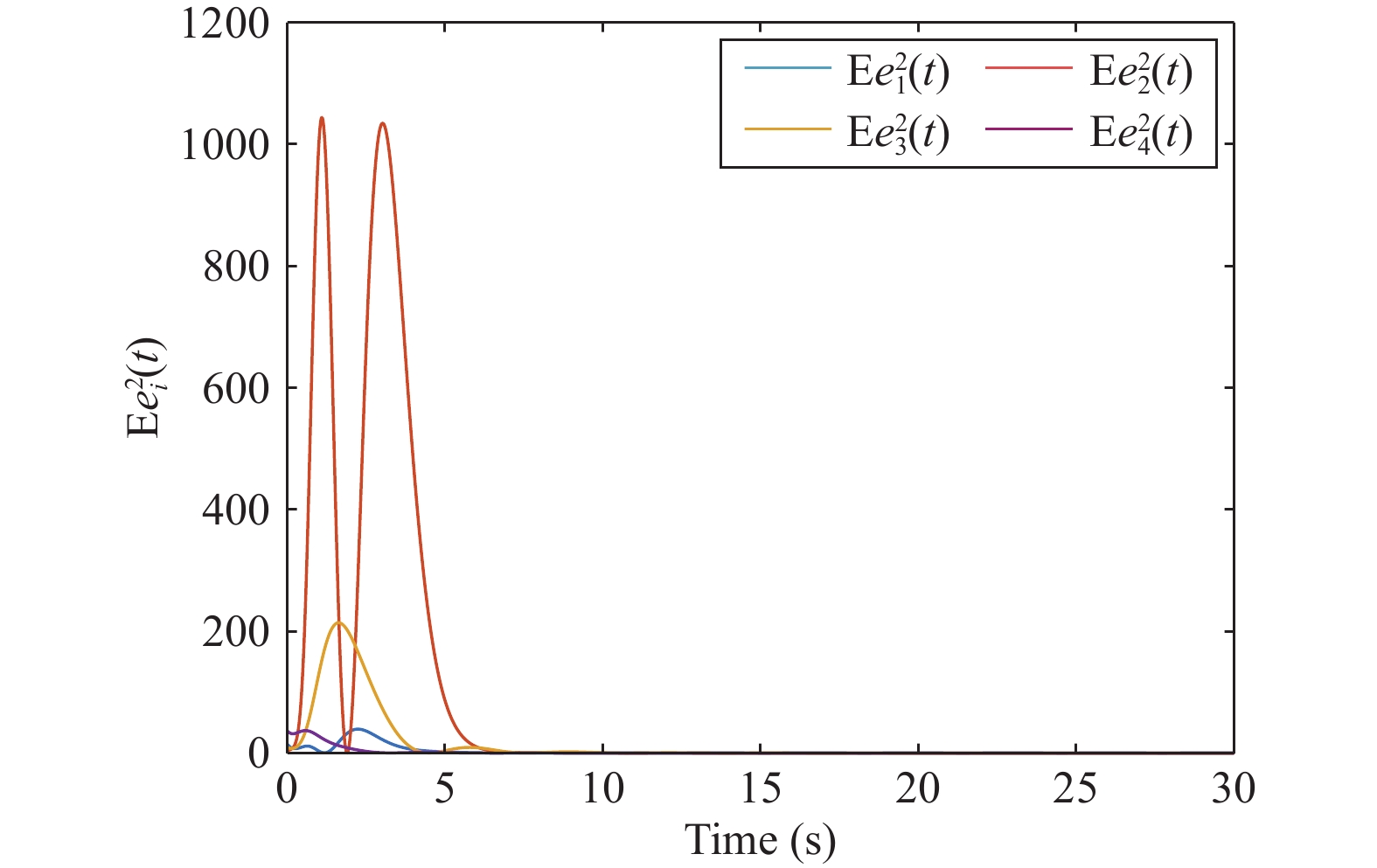
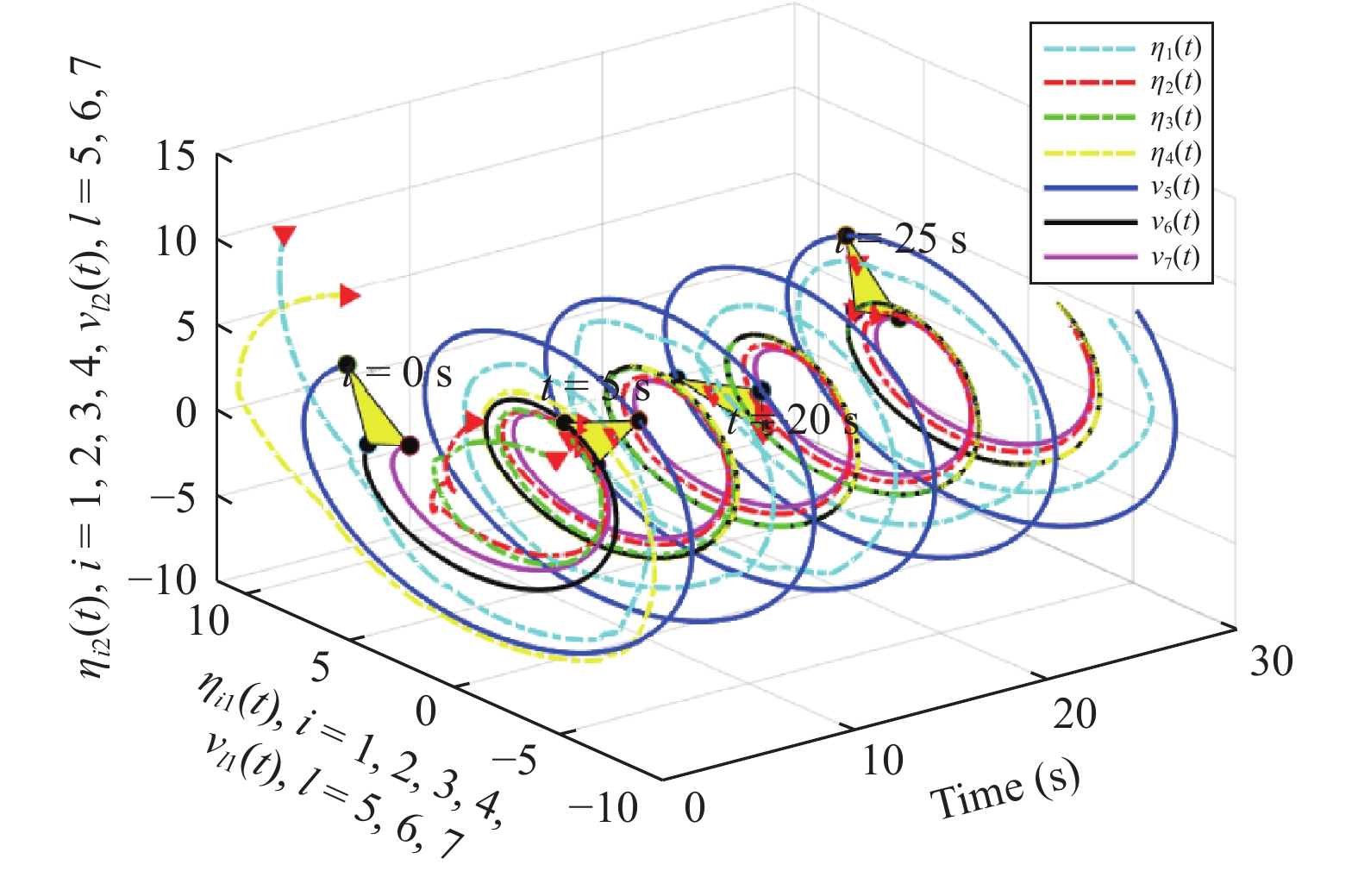
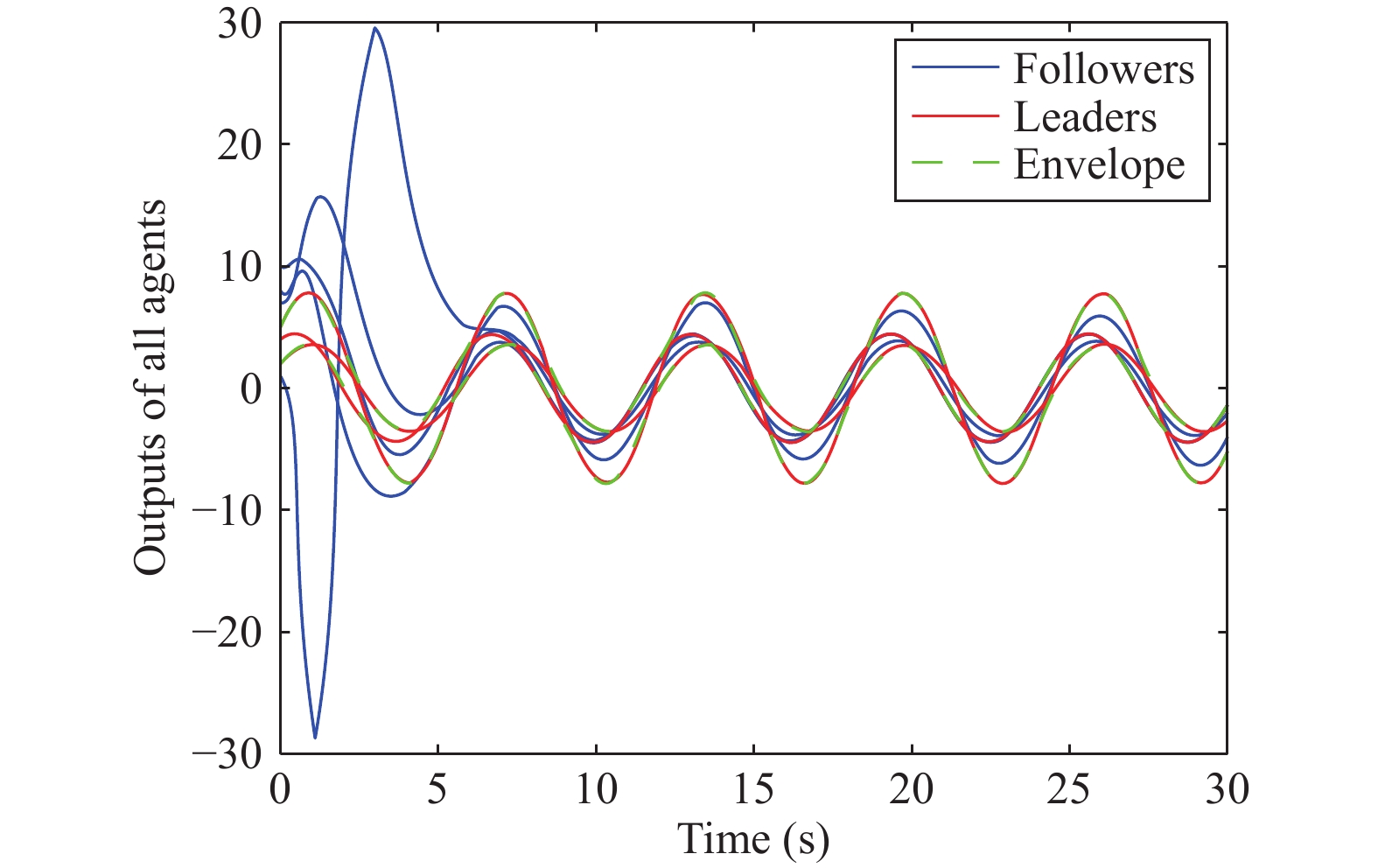
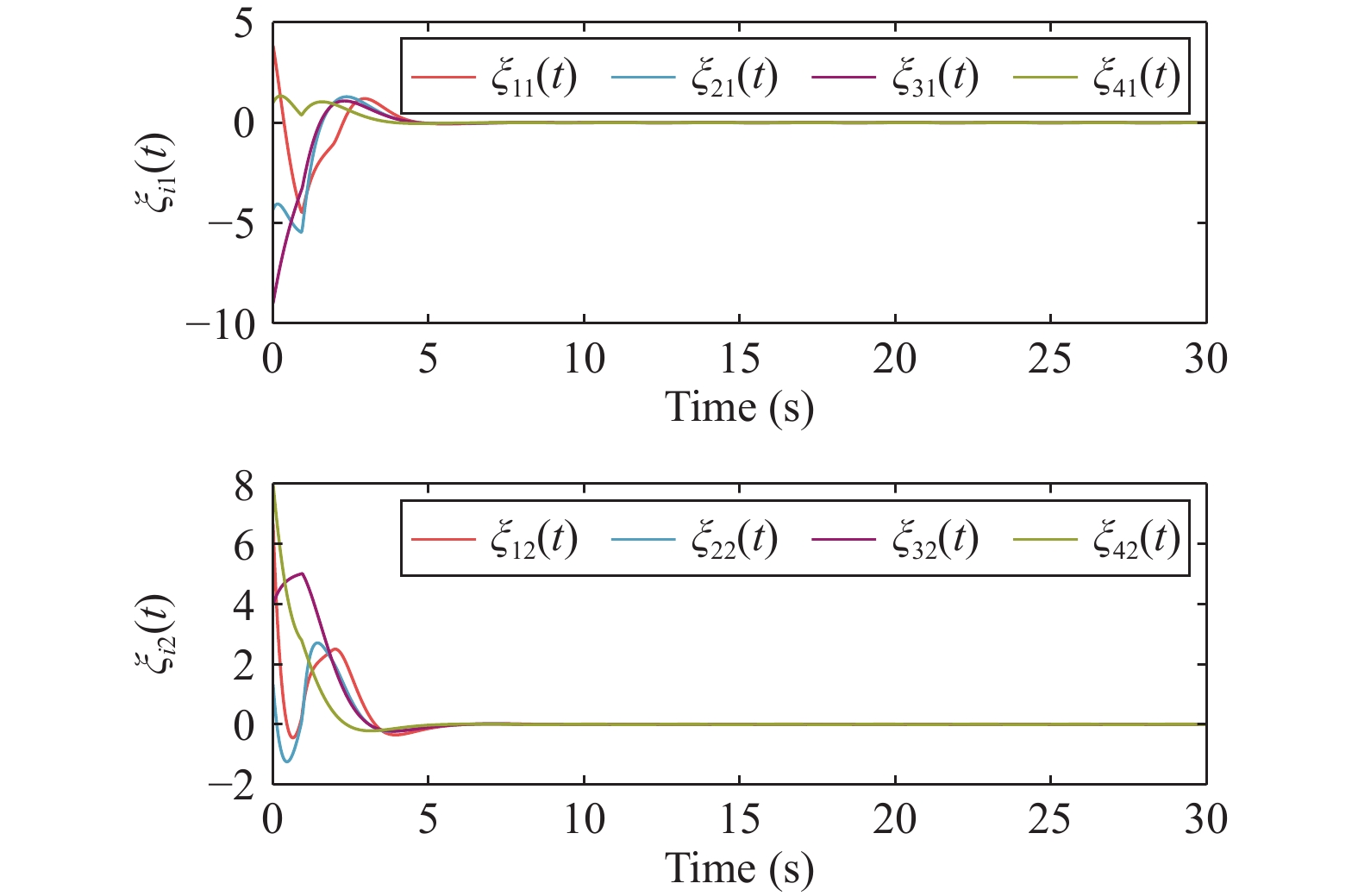
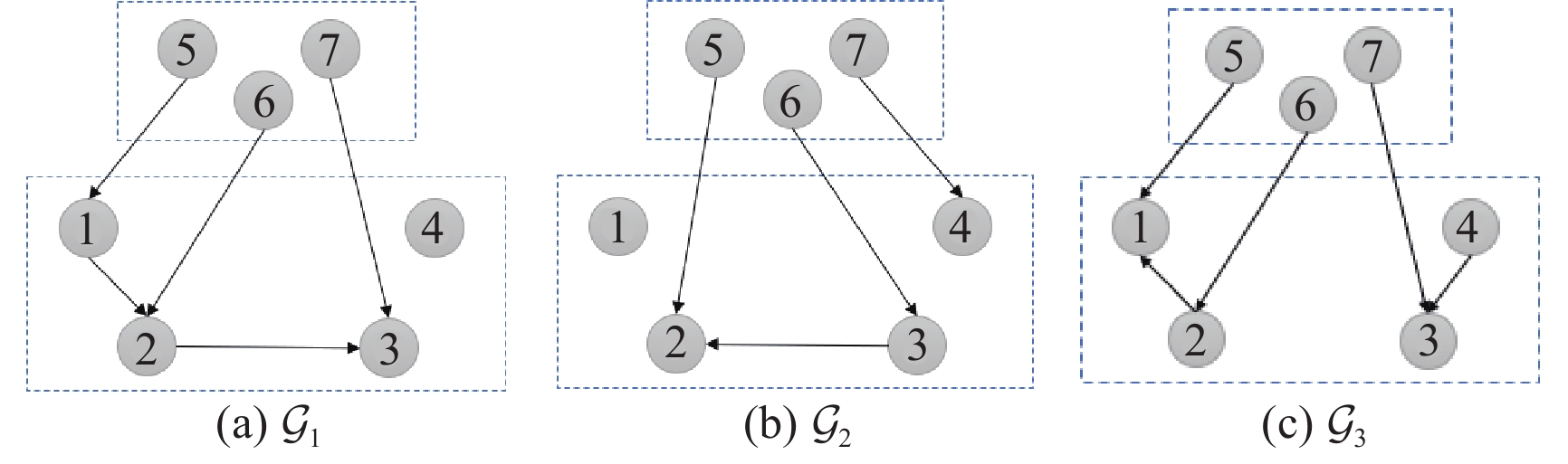
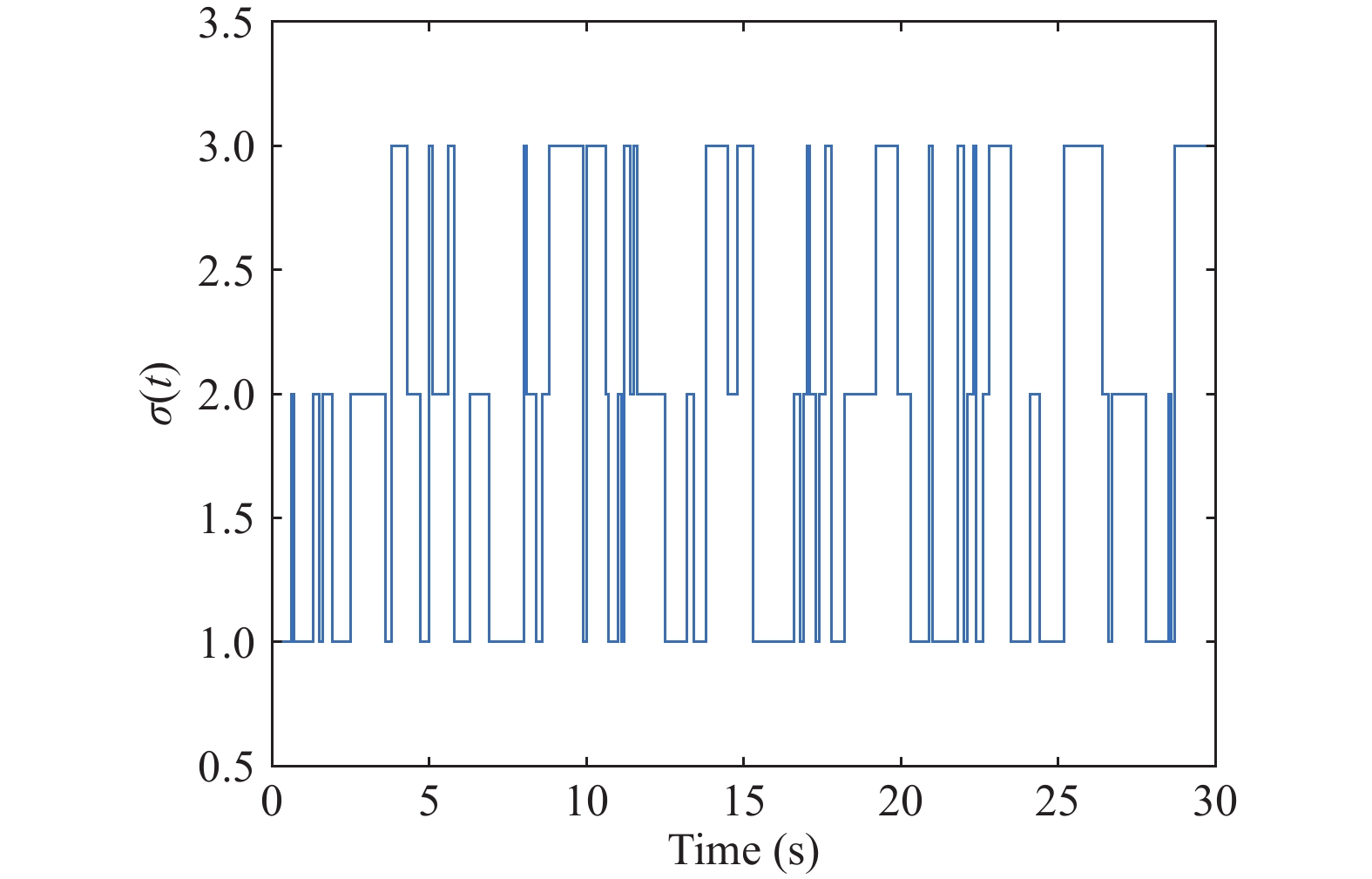
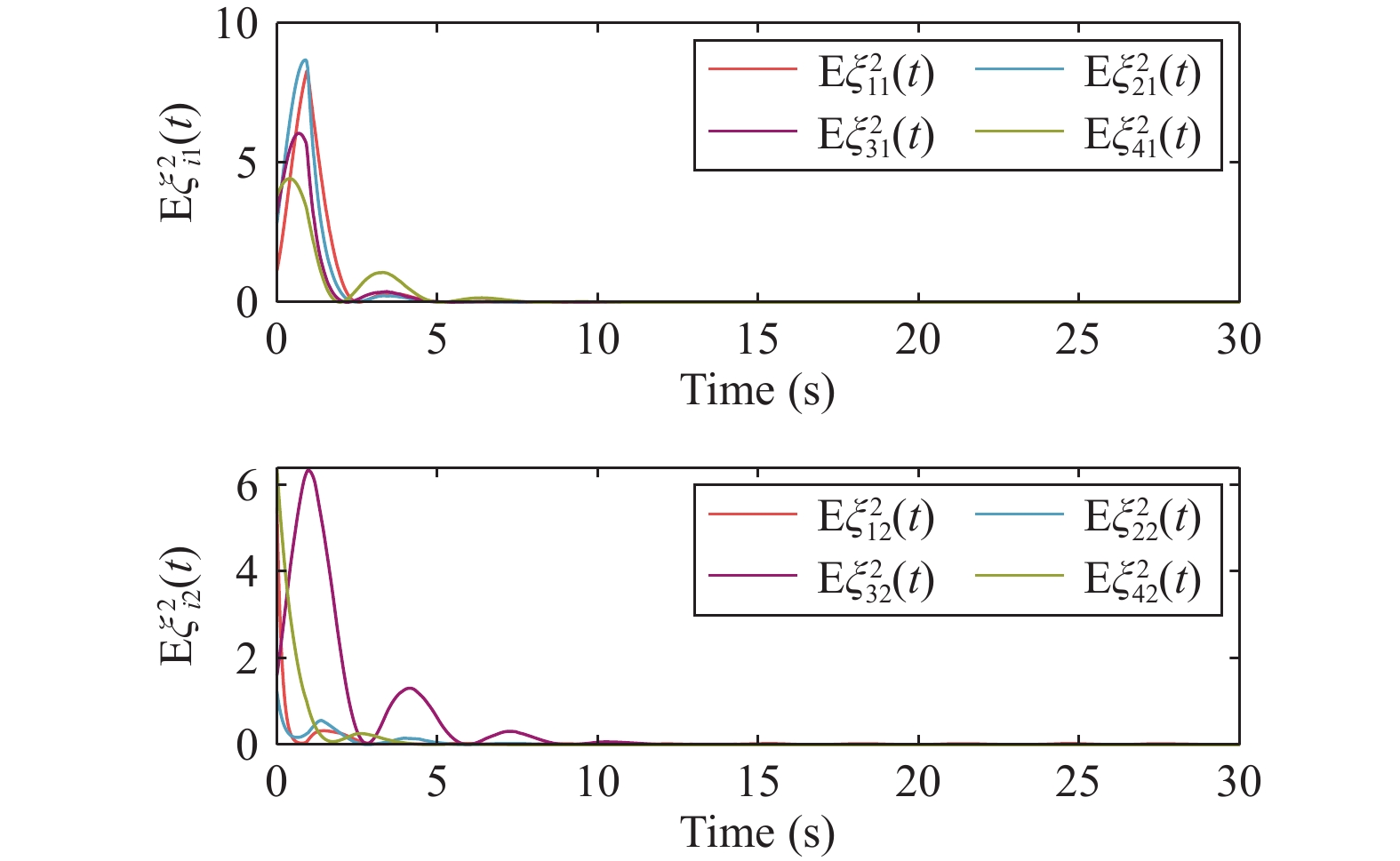
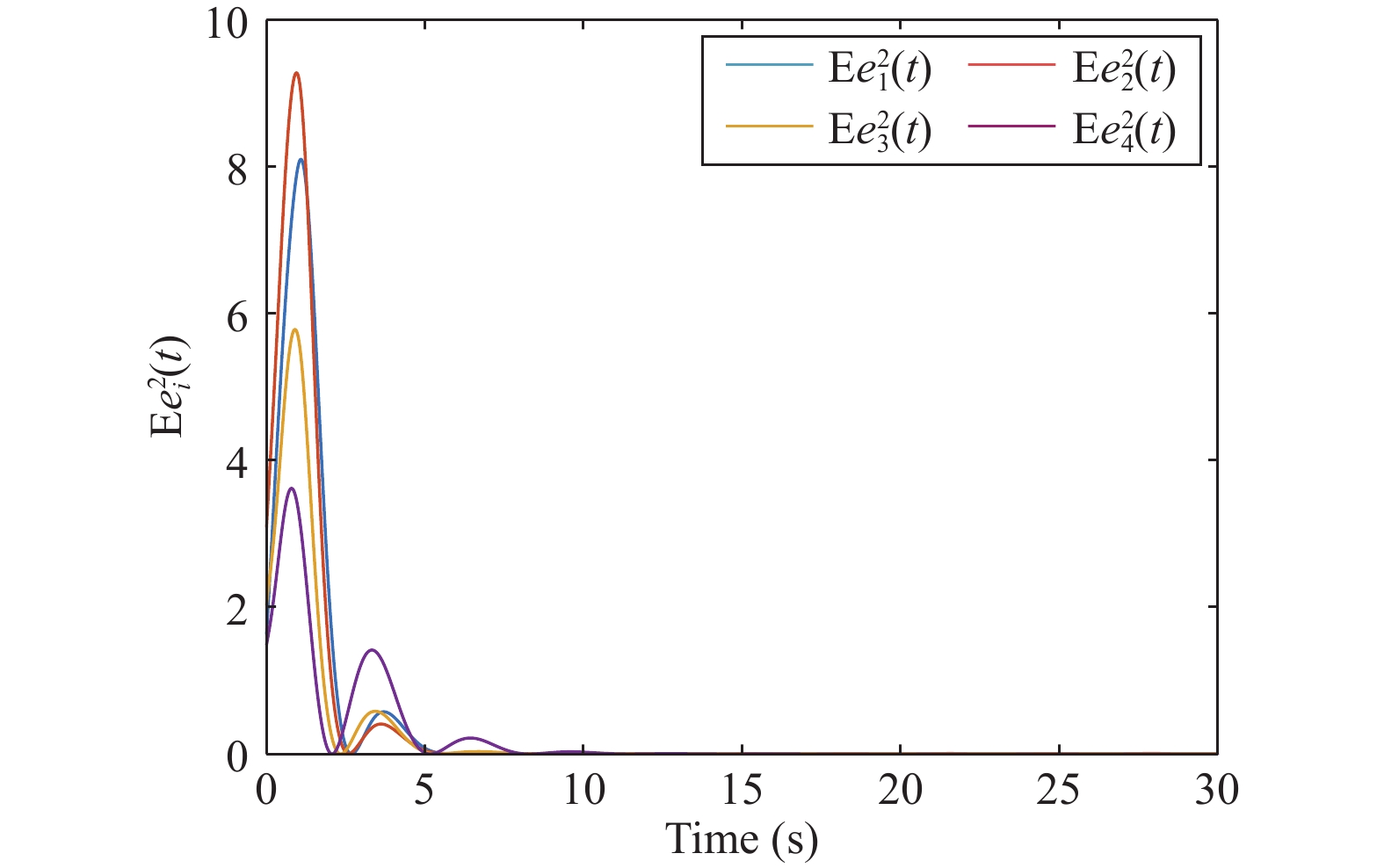
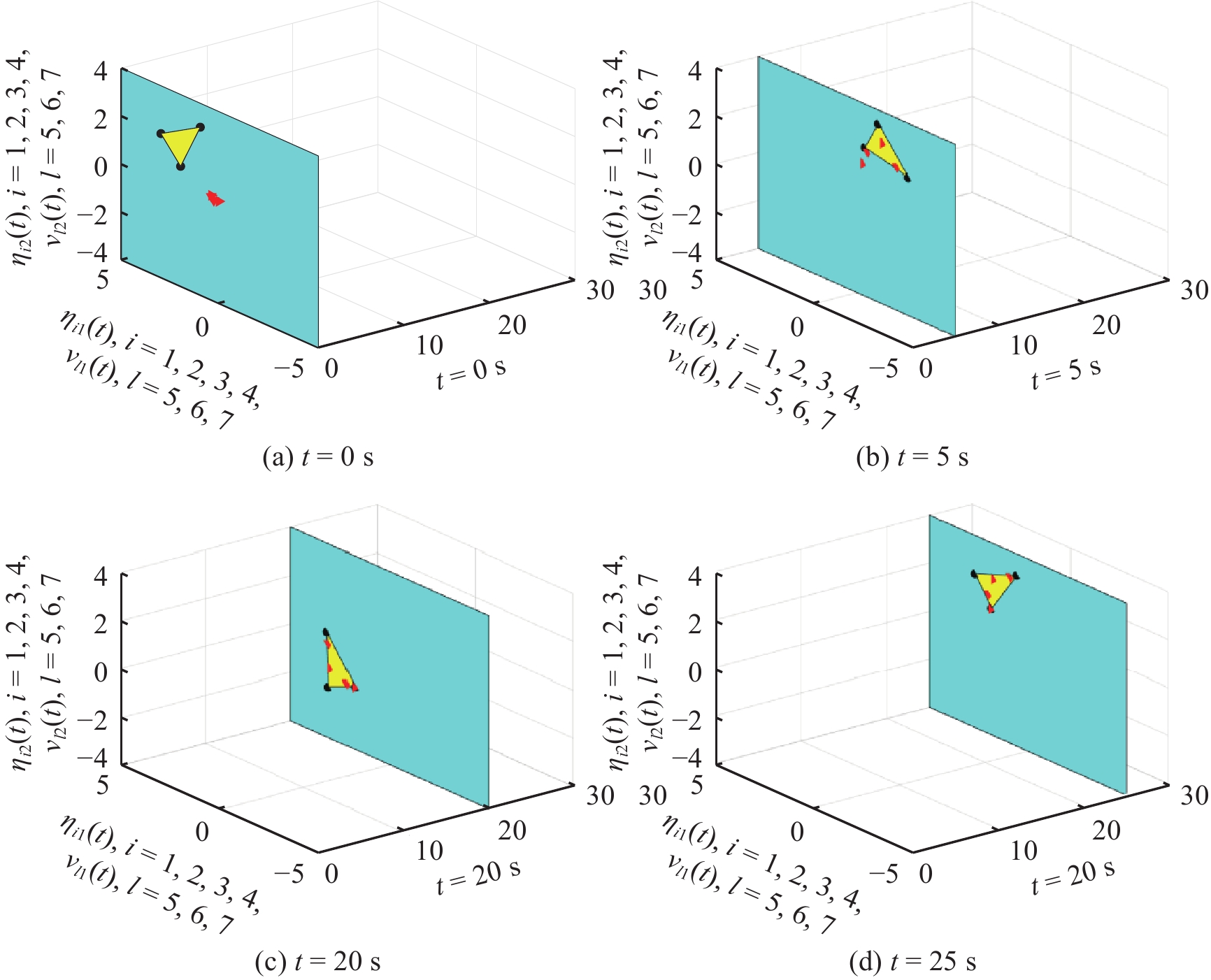
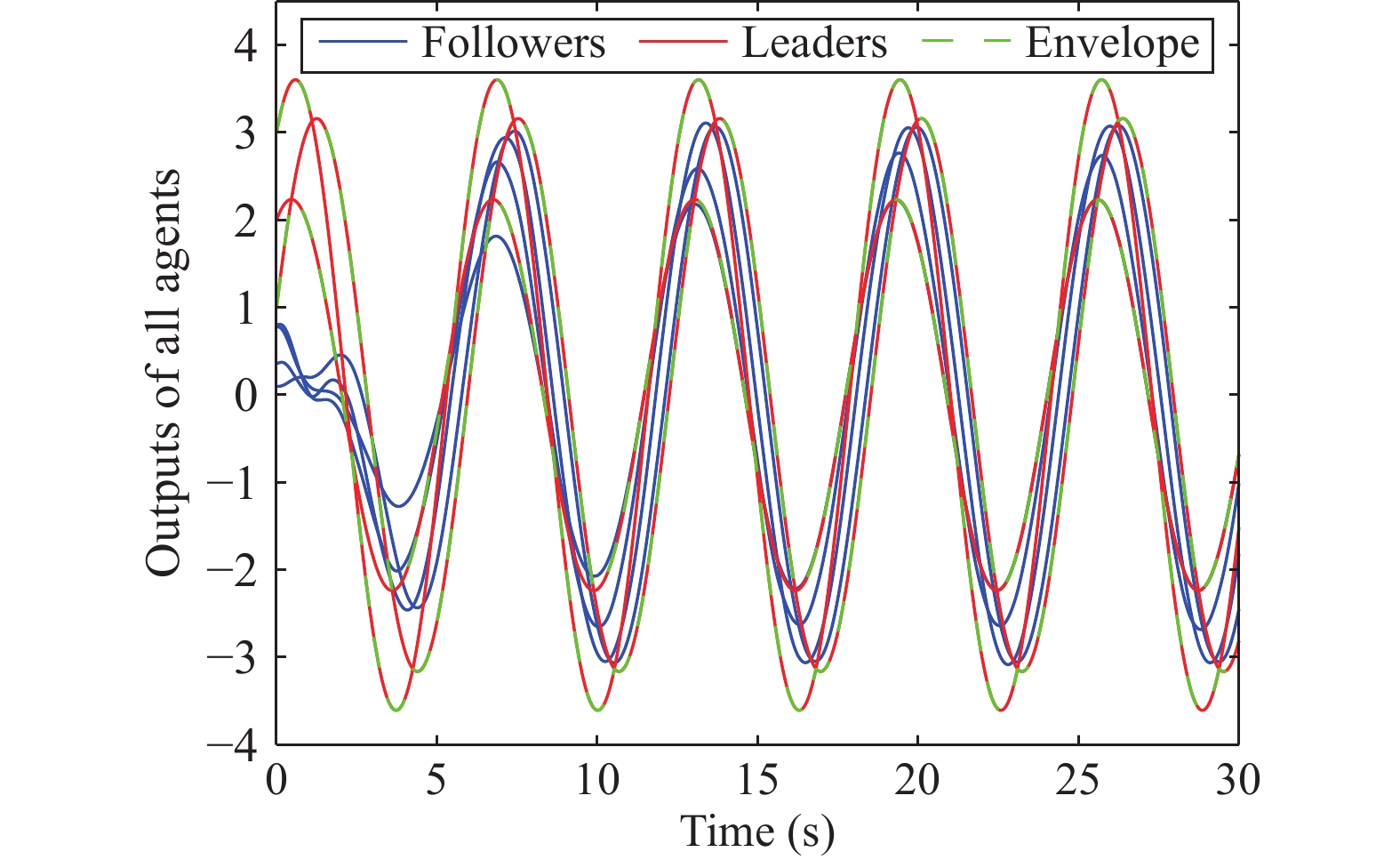
This paper considers the mean square output containment control problem for heterogeneous multi-agent systems (MASs) with randomly switching topologies and nonuniform distributed delays. By modeling the switching topologies as a continuous-time Markov process and taking the distributed delays into consideration, a novel distributed containment observer is proposed to estimate the convex hull spanned by the leaders’ states. A novel distributed output feedback containment controller is then designed without using the prior knowledge of distributed delays. By constructing a novel switching Lyapunov functional, the output containment control problem is then solved in the sense of mean square under an easily-verifiable sufficient condition. Finally, two numerical examples are given to show the effectiveness of the proposed controller.

| [1] |
W. Ren and R. W. Beard, “Consensus algorithms for double-integrator dynamics,” Distributed Consensus in Multi-vehicle Cooperative Control: Theory and Applications, pp. 77–104, 2008.
|
| [2] |
S. Martinez, J. Cortes, and F. Bullo, “Motion coordination with distributed information,” IEEE Control Syst. Mag., vol. 27, no. 4, pp. 75–88, 2007. doi: 10.1109/MCS.2007.384124
|
| [3] |
R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and cooperation in networked multi-agent systems,” Proc. the IEEE, vol. 95, no. 1, pp. 215–233, 2007. doi: 10.1109/JPROC.2006.887293
|
| [4] |
Y. Cao, W. Yu, W. Ren, and G. Chen, “An overview of recent progress in the study of distributed multi-agent coordination,” IEEE Trans. Industr. Inform., vol. 9, no. 1, pp. 427–438, 2012.
|
| [5] |
D. Zhang, G. Feng, Y. Shi, and D. Srinivasan, “Physical safety and cyber security analysis of multi-agent systems: A survey of recent advances,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 319–333, 2021. doi: 10.1109/JAS.2021.1003820
|
| [6] |
R. Olfati-Saber and R. M. Murray, “Consensus problems in networks of agents with switching topology and time-delays,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1520–1533, 2004. doi: 10.1109/TAC.2004.834113
|
| [7] |
P. Wieland and F. Allgöwer, “An internal model principle for consensus in heterogeneous linear multi-agent systems,” IFAC Proc. Volumes, vol. 42, no. 20, pp. 7–12, 2009. doi: 10.3182/20090924-3-IT-4005.00002
|
| [8] |
G. Difilippo, M. P. Fanti, and A. M. Mangini, “Maximizing convergence speed for second order consensus in leaderless multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 2, pp. 259–269, 2022.
|
| [9] |
Z. Li, Z. Duan, G. Chen, and L. Huang, “Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint,” IEEE Trans. Circuits Syst. I: Regul. Pap., vol. 57, no. 1, pp. 213–224, 2009.
|
| [10] |
Z. Wang, M. He, T. Zheng, Z. Fan, and G. Liu, “Guaranteed cost consensus for high-dimensional multi-agent systems with time-varying delays,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 181–189, 2018.
|
| [11] |
Y. Su and J. Huang, “Cooperative output regulation with application to multi-agent consensus under switching network,” IEEE Trans. Syst. Man Cybern. Syst., vol. 42, no. 3, pp. 864–875, 2012. doi: 10.1109/TSMCB.2011.2179981
|
| [12] |
L. Ding, Q.-L. Han, and G. Guo, “Network-based leader-following consensus for distributed multi-agent systems,” Automatica, vol. 49, no. 7, pp. 2281–2286, 2013. doi: 10.1016/j.automatica.2013.04.021
|
| [13] |
W. Cao, L. Liu, and G. Feng, “Distributed adaptive output consensus of unknown heterogeneous non-minimum phase multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 9, pp. 1–12, 2022. doi: 10.1109/JAS.2021.1004269
|
| [14] |
Z. Ding, “Consensus output regulation of a class of heterogeneous nonlinear systems,” IEEE Trans. Autom. Control, vol. 58, no. 10, pp. 2648–2653, 2013. doi: 10.1109/TAC.2013.2255973
|
| [15] |
M. Ji, G. Ferrari-Trecate, M. Egerstedt, and A. Buffa, “Containment control in mobile networks,” IEEE Trans. Autom. Control, vol. 53, no. 8, pp. 1972–1975, 2008. doi: 10.1109/TAC.2008.930098
|
| [16] |
Y. Cao, W. Ren, and M. Egerstedt, “Distributed containment control with multiple stationary or dynamic leaders in fixed and switching directed networks,” Automatica, vol. 48, no. 8, pp. 1586–1597, 2012. doi: 10.1016/j.automatica.2012.05.071
|
| [17] |
X. Wang, S. Li, and P. Shi, “Distributed finite-time containment control for double-integrator multiagent systems,” IEEE Trans. Cybern., vol. 44, no. 9, pp. 1518–1528, 2014. doi: 10.1109/TCYB.2013.2288980
|
| [18] |
J. Qin, W. X. Zheng, H. Gao, Q. Ma, and W. Fu, “Containment control for second-order multiagent systems communicating over heterogeneous networks,” IEEE Trans. Neural Netw. Learn. Syst., vol. 28, no. 9, pp. 2143–2155, 2017.
|
| [19] |
J. Mei, W. Ren, B. Li, and G. Ma, “Distributed containment control for multiple unknown second-order nonlinear systems with application to networked lagrangian systems,” IEEE Trans. Neural Netw. Learn. Syst., vol. 26, no. 9, pp. 1885–1899, 2015. doi: 10.1109/TNNLS.2014.2359955
|
| [20] |
Z. Li, W. Duan, Zhisheng and, and G. Feng, “Containment control of linear multi-agent systems with multiple leaders of bounded inputs using distributed continuous controllers,” Int. J. Robust Nonlinear Control, vol. 25, no. 13, pp. 2101–2121, 2015. doi: 10.1002/rnc.3195
|
| [21] |
G. Wen, Y. Zhao, Z. Duan, W. Yu, and G. Chen, “Containment of higher-order multi-leader multi-agent systems: A dynamic output approach,” IEEE Trans. Autom. Control, vol. 61, no. 4, pp. 1135–1140, 2016. doi: 10.1109/TAC.2015.2465071
|
| [22] |
A. Amini, A. Asif, and A. Mohammadi, “Formation-containment control using dynamic event-triggering mechanism for multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1235–1248, 2020.
|
| [23] |
P. Li, F. Jabbari, and X.-M. Sun, “Containment control of multi-agent systems with input saturation and unknown leader inputs,” Automatica, vol. 130, p. 109677, 2021. doi: 10.1016/j.automatica.2021.109677
|
| [24] |
T. Liu, J. Qi, and Z.-P. Jiang, “Distributed containment control of multi-agent systems with velocity and acceleration saturations,” Automatica, vol. 117, p. 108992, 2020. doi: 10.1016/j.automatica.2020.108992
|
| [25] |
H. Haghshenas, M. A. Badamchizadeh, and M. Baradarannia, “Containment control of heterogeneous linear multi-agent systems,” Automatica, vol. 54, pp. 210–216, 2015. doi: 10.1016/j.automatica.2015.02.002
|
| [26] |
S. Zuo, Y. Song, F. L. Lewis, and A. Davoudi, “Output containment control of linear heterogeneous multi-agent systems using internal model principle,” IEEE Trans. Cybern., vol. 47, no. 8, pp. 2099–2109, 2017. doi: 10.1109/TCYB.2016.2641394
|
| [27] |
S. Zuo, Y. Song, F. L. Lewis, and A. Davoudi, “Adaptive output containment control of heterogeneous multi-agent systems with unknown leaders,” Automatica, vol. 92, pp. 235–239, 2018. doi: 10.1016/j.automatica.2018.02.004
|
| [28] |
W. Huang, H. Liu, and J. Huang, “Distributed robust containment control of linear heterogeneous multi-agent systems: An output regulation approach,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 864–877, 2022. doi: 10.1109/JAS.2022.105560
|
| [29] |
Y. Lou and Y. Hong, “Target containment control of multi-agent systems with random switching interconnection topologies,” Automatica, vol. 48, no. 5, pp. 879–885, 2012. doi: 10.1016/j.automatica.2012.02.032
|
| [30] |
W. Li, L. Xie, and J.-F. Zhang, “Containment control of leader-following multi-agent systems with Markovian switching network topologies and measurement noises,” Automatica, vol. 51, pp. 263–267, 2015. doi: 10.1016/j.automatica.2014.10.070
|
| [31] |
H. Liang, L. Zhang, Y. Sun, and T. Huang, “Containment control of semi-Markovian multiagent systems with switching topologies,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 6, pp. 3889–3899, 2021. doi: 10.1109/TSMC.2019.2946248
|
| [32] |
K. Li and X. Mu, “Containment control of stochastic multiagent systems with semi-Markovian switching topologies,” Int. J. Robust Nonlinear Control, vol. 29, no. 14, pp. 4943–4955, 2019. doi: 10.1002/rnc.4661
|
| [33] |
D. Wang and W. Wang, “Necessary and sufficient conditions for containment control of multi-agent systems with time delay,” Automatica, vol. 103, pp. 418–423, 2019. doi: 10.1016/j.automatica.2018.12.029
|
| [34] |
K. Liu, G. Xie, and L. Wang, “Containment control for second-order multi-agent systems with time-varying delays,” Syst. Control. Lett., vol. 67, pp. 24–31, 2014. doi: 10.1016/j.sysconle.2013.12.013
|
| [35] |
W. Michiels, C.-I. Morărescu, and S.-I. Niculescu, “Consensus problems with distributed delays, with application to traffic flow models,” SIAM J. Control Optim., vol. 48, no. 1, pp. 77–101, 2009. doi: 10.1137/060671425
|
| [36] |
X. Liu, K. Zhang, and W.-C. Xie, “Impulsive consensus of networked multi-agent systems with distributed delays in agent dynamics and impulsive protocols,” J. Dyn. Syst. Meas. Control, vol. 141, no. 1, 2019.
|
| [37] |
U. Muenz, A. Papachristodoulou, and F. Allgoewer, “Consensus reaching in multi-agent packet-switched networks with non-linear coupling,” Int. J. Control, vol. 82, no. 5, pp. 953–969, 2009. doi: 10.1080/00207170802398018
|
| [38] |
C. Bi, X. Xu, L. Liu, and G. Feng, “Output containment control of heterogeneous linear multiagent systems with unbounded distributed transmission delays,” IEEE Trans. Cybern., vol. 52, no. 8, pp. 8157–8166, 2022. doi: 10.1109/TCYB.2021.3050177
|
| [39] |
B. Zhou and Z. Lin, “Consensus of high-order multi-agent systems with large input and communication delays,” Automatica, vol. 50, no. 2, pp. 452–464, 2014. doi: 10.1016/j.automatica.2013.12.006
|
| [40] |
X. Xu, L. Liu, and G. Feng, “Consensus of heterogeneous linear multiagent systems with communication time-delays,” IEEE Trans. Cybern., vol. 47, no. 8, pp. 1820–1829, 2017. doi: 10.1109/TCYB.2017.2702635
|
| [41] |
M. Lu and L. Liu, “Distributed feedforward approach to cooperative output regulation subject to communication delays and switching networks,” IEEE Trans. Autom. Control, vol. 62, no. 4, pp. 1999–2005, 2017. doi: 10.1109/TAC.2016.2594151
|
| [42] |
P. Wieland, R. Sepulchre, and F. Allgöwer, “An internal model principle is necessary and sufficient for linear output synchronization,” Automatica, vol. 47, no. 5, pp. 1068–1074, 2011. doi: 10.1016/j.automatica.2011.01.081
|
| [43] |
J. Huang, Nonlinear Output Regulation: Theory and Applications. SIAM, 2004.
|
| [44] |
O. L. do Valle Costa, M. D. Fragoso, and M. G. Todorov, Continuous-Time Markov Jump Linear Systems. Springer Science & Business Media, 2012.
|
| [45] |
C. Bi, X. Xu, L. Liu, and G. Feng, “Robust cooperative output regulation of heterogeneous uncertain linear multi-agent systems with unbounded distributed transmission delays,” IEEE Trans. Autom. Control, vol. 67, no. 3, pp. 1371–1383, 2022. doi: 10.1109/TAC.2021.3069718
|
| [46] |
X. Xu, L. Liu, and G. Feng, “Stabilization of linear systems with distributed infinite input delays: A low gain approach,” Automatica, vol. 94, pp. 396–408, 2018. doi: 10.1016/j.automatica.2018.04.049
|
| [47] |
D. Li and T. Li, “Cooperative output feedback tracking control of stochastic linear heterogeneous multi-agent systems,” IEEE Trans. Autom. Control, 2021. DOI: 10.1109/TAC.2021.3132235
|
| [48] |
G. Wen, X. Yu, W. Yu, and J. Lu, “Coordination and control of complex network systems with switching topologies: A survey,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 10, pp. 6342–6357, 2020.
|
| [49] |
M. Meng, L. Liu, and G. Feng, “Output consensus for heterogeneous multiagent systems with Markovian switching network topologies,” Int. J. Robust Nonlinear Control, vol. 28, no. 3, pp. 1049–1061, 2018. doi: 10.1002/rnc.3918
|
| [50] |
M. Meng, L. Liu, and G. Feng, “Adaptive output regulation of heterogeneous multiagent systems under Markovian switching topologies,” IEEE Trans. Cybern., vol. 48, no. 10, pp. 2962–2971, 2018. doi: 10.1109/TCYB.2017.2753382
|
| [51] |
S. Luo, X. Xu, L. Liu, and G. Feng, “Leader-following consensus of heterogeneous linear multiagent systems with communication time-delays via adaptive distributed observers,” IEEE Trans. Cybern., vol. 52, no. 12, pp. 13336–13349, 2022. doi: 10.1109/TCYB.2021.3115124
|
| [52] |
M. Lv, W. Yu, J. Cao, and S. Baldi, “A separation-based methodology to consensus tracking of switched high-order nonlinear multiagent systems,” IEEE Trans. Neural Netw. Learn. Syst., vol. 33, no. 10, pp. 5467–5479, 2022. doi: 10.1109/TNNLS.2021.3070824
|
| [53] |
M. Lv, B. De Schutter, C. Shi, and S. Baldi, “Logic-based distributed switching control for agents in power-chained form with multiple unknown control directions,” Automatica, vol. 137, p. 110143, 2022. doi: 10.1016/j.automatica.2021.110143
|
Figures(13)






 DownLoad:
DownLoad: