A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 10
Volume 9
Issue 10
IEEE/CAA Journal of Automatica Sinica
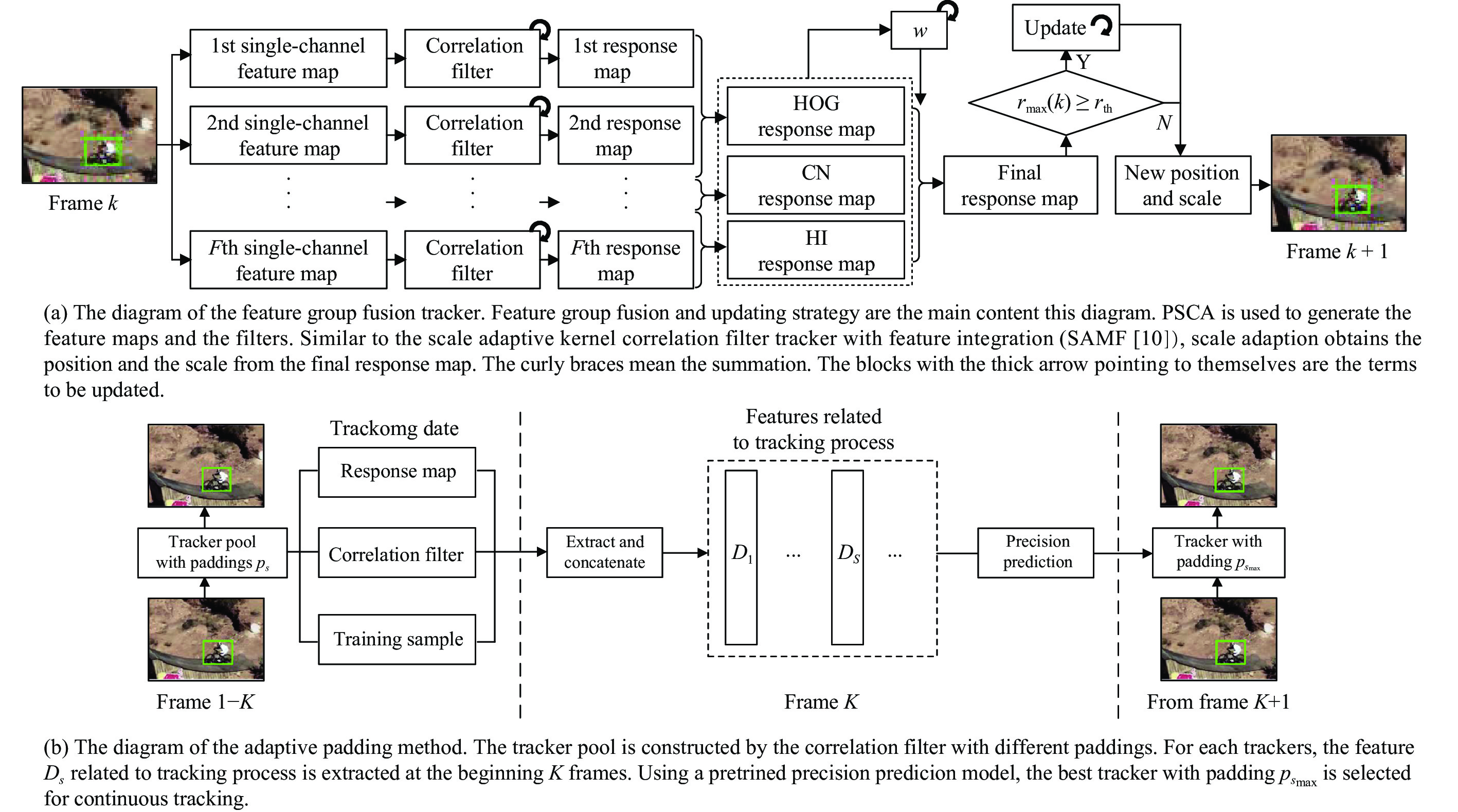
| Citation: | Z. H. Feng, L. P. Yan, Y. Q. Xia, and B. Xiao, “An adaptive padding correlation filter with group feature fusion for robust visual tracking,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 10, pp. 1845–1860, Oct. 2022. doi: 10.1109/JAS.2022.105878

|

| [1] |
A. W. Smeulders, D. M. Chu, R. Cucchiara, S. Calderara, A. Dehghan, and M. Shah, “Visual tracking: An experimental survey,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 36, no. 7, pp. 1442–1468, 2013.
|
| [2] |
X. Yuan, L. Kong, D. Feng, and Z. Wei, “Automatic feature point detection and tracking of human actions in time-of-flight videos,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 4, pp. 677–685, 2017. doi: 10.1109/JAS.2017.7510625
|
| [3] |
J. H. White and R. W. Beard, “An iterative pose estimation algorithm based on epipolar geometry with application to multi-target tracking,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 942–953, 2020. doi: 10.1109/JAS.2020.1003222
|
| [4] |
M. Zhang, X. Liu, D. Xu, Z. Cao, and J. Yu, “Vision-based target-following guider for mobile robot,” IEEE Trans. Industrial Electronics, vol. 66, no. 12, pp. 9360–9371, 2019. doi: 10.1109/TIE.2019.2893829
|
| [5] |
Y. Liu, Z. Meng, Y. Zou, and M. Cao, “Visual object tracking and servoing control of a nano-scale quadrotor: System, algorithms, and experiments,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 344–360, 2021. doi: 10.1109/JAS.2020.1003530
|
| [6] |
I. Ahmed, S. Din, G. Jeon, F. Piccialli, and G. Fortino, “Towards collaborative robotics in top view surveillance: A framework for multiple object tracking by detection using deep learning,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 7, pp. 1253–1270, 2021. doi: 10.1109/JAS.2020.1003453
|
| [7] |
C. Ma, J. Huang, X. Yang, and M. Yang, “Robust visual tracking via hierarchical convolutional features,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 41, no. 11, pp. 2709–2723, 2018.
|
| [8] |
Y. Wu, J. Lim, and M. Yang, “Object tracking benchmark,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 37, no. 9, pp. 1834–1848, 2015. doi: 10.1109/TPAMI.2014.2388226
|
| [9] |
M. Kristan, A. Leonardis, J. Matas, et al., “The 6th visual object tracking VOT2018 challenge results,” in Proc. European Conf. Computer Vision, Springer, 2018, pp. 3−53.
|
| [10] |
Y. Li and J. Zhu, “A scale adaptive kernel correlation filter tracker with feature integration,” in Proc. European Conf. Computer Vision, Springer, 2014, pp. 254–265.
|
| [11] |
J. F. Henriques, R. Caseiro, Martins, and J. Batista, “High-speed tracking with kernelized correlation filters,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 37, no. 3, pp. 583–596, 2014.
|
| [12] |
Y. Sui, G. Wang, and L. Zhang, “Correlation filter learning toward peak strength for visual tracking,” IEEE Trans. Cybernetics, vol. 48, no. 4, pp. 1290–1303, 2017.
|
| [13] |
M. Danelljan, G. Hager, F. Shahbaz Khan, and M. Felsberg, “Learning spatially regularized correlation filters for visual tracking,” in Proc. IEEE Int. Conf. Computer Vision, 2015, pp. 4310−4318.
|
| [14] |
T. Xu, Z. Feng, X. Wu, and J. Kittler, “Learning adaptive discriminative correlation filters via temporal consistency preserving spatial feature selection for robust visual object tracking,” IEEE Trans. Image Processing, vol. 28, no. 11, pp. 5596–5609, 2019. doi: 10.1109/TIP.2019.2919201
|
| [15] |
G. Zhu, Z. Zhang, J. Wang, Y. Wu, and H. Lu, “Dynamic collaborative tracking,” IEEE Trans. Neural Networks and Learning Systems, vol. 30, no. 10, pp. 3035–3046, 2019. doi: 10.1109/TNNLS.2018.2861838
|
| [16] |
M. Mueller, N. Smith, and B. Ghanem, “Context-aware correlation filter tracking,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2017, pp. 1396−1404.
|
| [17] |
T. Bouraffa, L. Yan, Z. Feng, B. Xiao, Q. M. J. Wu, and Y. Xia, “Context-aware correlation filter learning toward peak strength for visual tracking,” IEEE Trans. Cybernetics, vol. 51, no. 10, pp. 5105–5115, 2021. doi: 10.1109/TCYB.2019.2935347
|
| [18] |
C. Ma, J.-B. Huang, X. Yang, and M.-H. Yang, “Adaptive correlation filters with long-term and short-term memory for object tracking,” Int. J. Computer Vision, vol. 126, no. 8, pp. 771–796, 2018. doi: 10.1007/s11263-018-1076-4
|
| [19] |
M. Danelljan, G. Bhat, F. Shahbaz Khan, and M. Felsberg, “ECO: Efficient convolution operators for tracking,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2017, pp. 6638−6646.
|
| [20] |
D. S. Bolme, J. R. Beveridge, B. A. Draper, and Y. M. Lui, “Visual object tracking using adaptive correlation filters,” in Proc. IEEE Computer Society Conf. Computer Vision and Pattern Recognition, 2010, pp. 2544−2550.
|
| [21] |
J. Van De Weijer, C. Schmid, J. Verbeek, and D. Larlus, “Learning color names for real-world applications,” IEEE Trans. Image Processing, vol. 18, no. 7, pp. 1512–1523, 2009. doi: 10.1109/TIP.2009.2019809
|
| [22] |
S. Liu, S. Wang, X. Liu, C. T. Lin, and Z. Lv, “Fuzzy detection aided real-time and robust visual tracking under complex environments,” IEEE Trans. Fuzzy Systems, vol. 29, no. 1, pp. 90–102, 2021. doi: 10.1109/TFUZZ.2020.3006520
|
| [23] |
S. Liu, C. Guo, F. Al-Turjman, K. Muhammad, and V. H. C. de Albuquerque, “Reliability of response region: A novel mechanism in visual tracking by edge computing for IIOT environments,” Mechanical Systems and Signal Processing, vol. 138, pp. 1–15, 2020.
|
| [24] |
M. K. Rapuru, S. Kakanuru, M. Venugopal, D. Mishra, and G. R. S. Subrahmanyam, “Correlation-based tracker-level fusion for robust visual tracking,” IEEE Trans. Image Processing, vol. 26, no. 10, pp. 4832–4842, 2017. doi: 10.1109/TIP.2017.2699791
|
| [25] |
Q. Guo, W. Feng, C. Zhou, R. Huang, L. Wan, and S. Wang, “Learning dynamic siamese network for visual object tracking,” in Proc. IEEE Int. Conf. Computer Vision, 2017, pp. 1763−1771.
|
| [26] |
Q. Guo, R. Han, W. Feng, Z. Chen, and L. Wan, “Selective spatial regularization by reinforcement learned decision making for object tracking,” IEEE Trans. Image Processing, vol. 29, pp. 2999–3013, 2999.
|
| [27] |
W. Feng, R. Han, Q. Guo, J. Zhu, and S. Wang, “Dynamic saliency-aware regularization for correlation filter-based object tracking,” IEEE Trans. Image Processing, vol. 28, no. 7, pp. 3232–3245, 2019. doi: 10.1109/TIP.2019.2895411
|
| [28] |
R. Han, Q. Guo, and W. Feng, “Content-related spatial regularization for visual object tracking,” in Proc. IEEE Int. Conf. Multimedia and Expo, 2018, pp. 1−6.
|
| [29] |
Y. Li, C. Fu, F. Ding, Z. Huang, and G. Lu, “Autotrack: Towards high-performance visual tracking for UAV with automatic spatio-temporal regularization,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2020, pp. 11920−11929.
|
| [30] |
M. Danelljan, G. Bhat, F. S. Khan, and M. Felsberg, “ATOM: Accurate tracking by overlap maximization,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2019, pp. 4655−4664.
|
| [31] |
G. Bhat, M. Danelljan, L. Van Gool, and R. Timofte, “Learning discriminative model prediction for tracking,” in Proc. IEEE Int. Conf. Computer Vision, 2019, pp. 6181−6190.
|
| [32] |
M. Danelljan, L. Van Gool, and R. Timofte, “Probabilistic regression for visual tracking,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2020, pp. 7181−7190.
|
| [33] |
A. Lukežič, J. Matas, and M. Kristan, “D3S a discriminative single shot segmentation tracker,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2020, pp. 7131−7140.
|
| [34] |
C. Ma, X. Yang, C. Zhang, and M.-H. Yang, “Long-term correlation tracking,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2015, pp. 5388−5396.
|
| [35] |
X. Wang, Z. Hou, W. Yu, L. Pu, Z. Jin, and X. Qin, “Robust occlusion-aware part-based visual tracking with object scale adaptation,” Pattern Recognition, vol. 81, pp. 456–470, 2018. doi: 10.1016/j.patcog.2018.04.011
|
| [36] |
M. Guan, C. Wen, S. Mao, C.-L. Ng, and Y. Zou, “Real-time event-triggered object tracking in the presence of model drift and occlusion,” IEEE Trans. Industrial Electronics, vol. 66, no. 3, pp. 2054–2065, 2019. doi: 10.1109/TIE.2018.2835390
|
| [37] |
J. Choi, H. Jin Chang, S. Yun, T. Fischer, Y. Demiris, and J. Young Choi, “Attentional correlation filter network for adaptive visual tracking,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2017, pp. 4807−4816.
|
| [38] |
J. Lopez and J. R. Dorronsoro, “Simple proof of convergence of the SMO algorithm for different SVM variants,” IEEE Trans. Neural Networks and Learning Systems, vol. 23, no. 7, pp. 1142–1147, 2012. doi: 10.1109/TNNLS.2012.2195198
|
| [39] |
M. Mueller, N. Smith, and B. Ghanem, “A benchmark and simulator for UAV tracking,” in Proc. European Conf. Computer Vision, Springer, 2016, pp. 445−461.
|
| [40] |
L. Bertinetto, J. Valmadre, S. Golodetz, O. Miksik, and P. H. Torr, “Staple: Complementary learners for real-time tracking,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2016, pp. 1401−1409.
|
| [41] |
M. Danelljan, G. Hager, F. Shahbaz Khan, and M. Felsberg, “Convolutional features for correlation filter based visual tracking,” in Proc. IEEE Int. Conf. Computer Vision Workshops, 2015, pp. 58−66.
|
| [42] |
L. Bertinetto, J. Valmadre, J. F. Henriques, A. Vedaldi, and P. H. S. Torr, “Fully-convolutional siamese networks for object tracking,” in Proc. European Conf. Computer Vision Workshops, 2016, pp. 850−865.
|
| [43] |
Y. Song, C. Ma, L. Gong, J. Zhang, R. W. H. Lau, and M. Yang, “CREST: Convolutional residual learning for visual tracking,” in Proc. IEEE Int. Conf. Computer Vision, 2017, pp. 2574−2583.
|
| [44] |
C. Ma, J. Huang, X. Yang, and M. Yang, “Robust visual tracking via hierarchical convolutional features,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 41, no. 11, pp. 2709–2723, 2019. doi: 10.1109/TPAMI.2018.2865311
|
| [45] |
S. Hare, S. Golodetz, A. Saffari, V. Vineet, M. Cheng, S. L. Hicks, and H. S. Torr, “Struck: Structured output tracking with kernels,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 38, no. 10, pp. 2096–2109, 2016. doi: 10.1109/TPAMI.2015.2509974
|
| [46] |
M. Danelljan, G. Häger, F. S. Khan, and M. Felsberg, “Discriminative scale space tracking,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 39, no. 8, pp. 1561–1575, 2017. doi: 10.1109/TPAMI.2016.2609928
|
| [47] |
A. Lukezic, T. Vojír, L. C. Zajc, J. Matas, and M. Kristan, “Discriminative correlation filter with channel and spatial reliability,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2017, pp. 6309−6318.
|
| [48] |
B. Li, J. Yan, W. Wu, Z. Zhu, and X. Hu, “High performance visual tracking with siamese region proposal network,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2018, pp. 8971−8980.
|
| [49] |
E. Gundogdu and A. A. Alatan, “Good features to correlate for visual tracking,” IEEE Trans. Image Processing, vol. 27, no. 5, pp. 2526–2540, 2018. doi: 10.1109/TIP.2018.2806280
|
| [50] |
F. Li, C. Tian, W. Zuo, L. Zhang, and M.-H. Yang, “Learning spatial-temporal regularized correlation filters for visual tracking,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2018, pp. 4904−4913.
|
Figures(9) / Tables(6)






 DownLoad:
DownLoad: