2021, 8(9): 1477-1499.
doi: 10.1109/JAS.2021.1004087
Abstract:
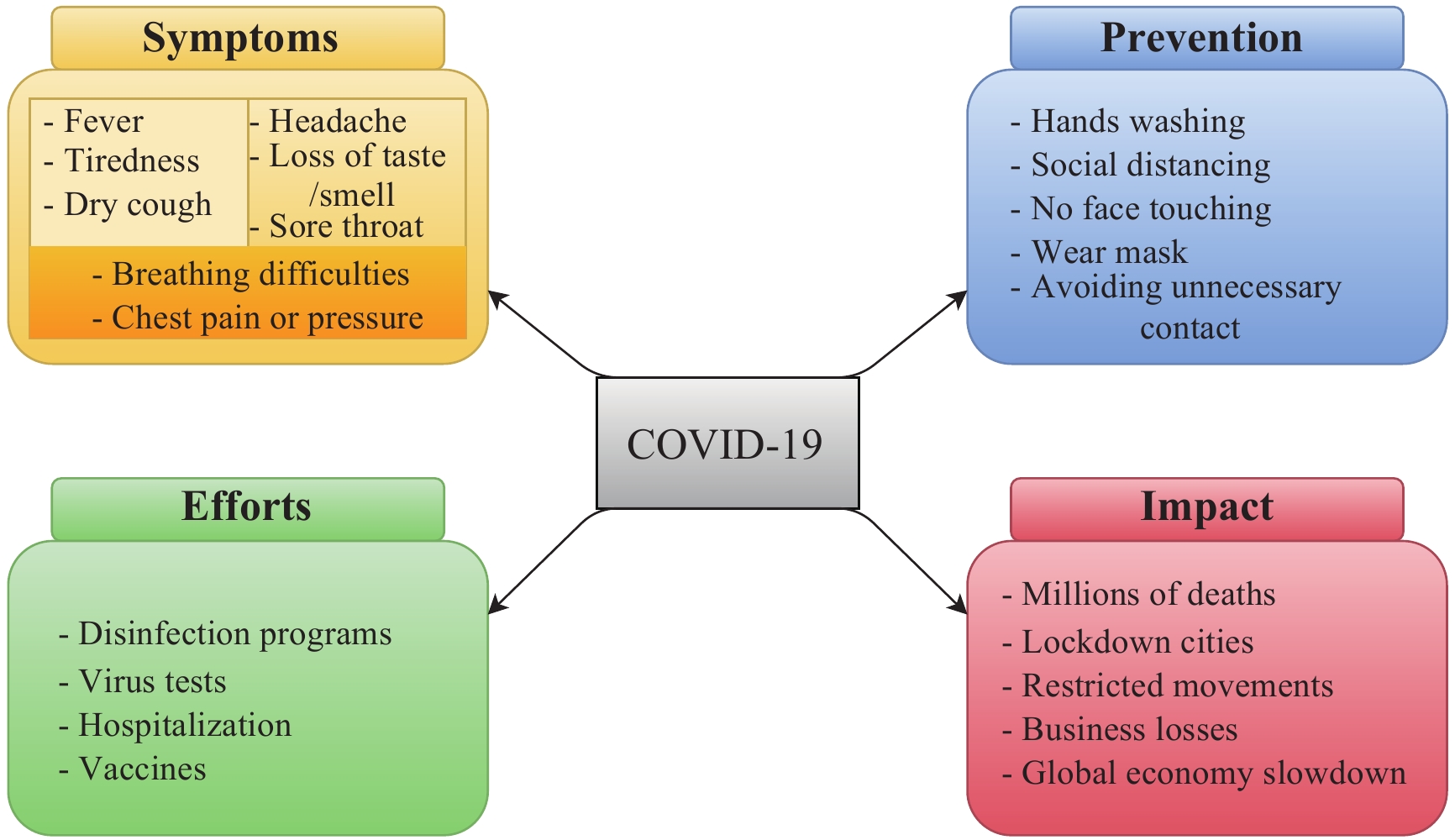
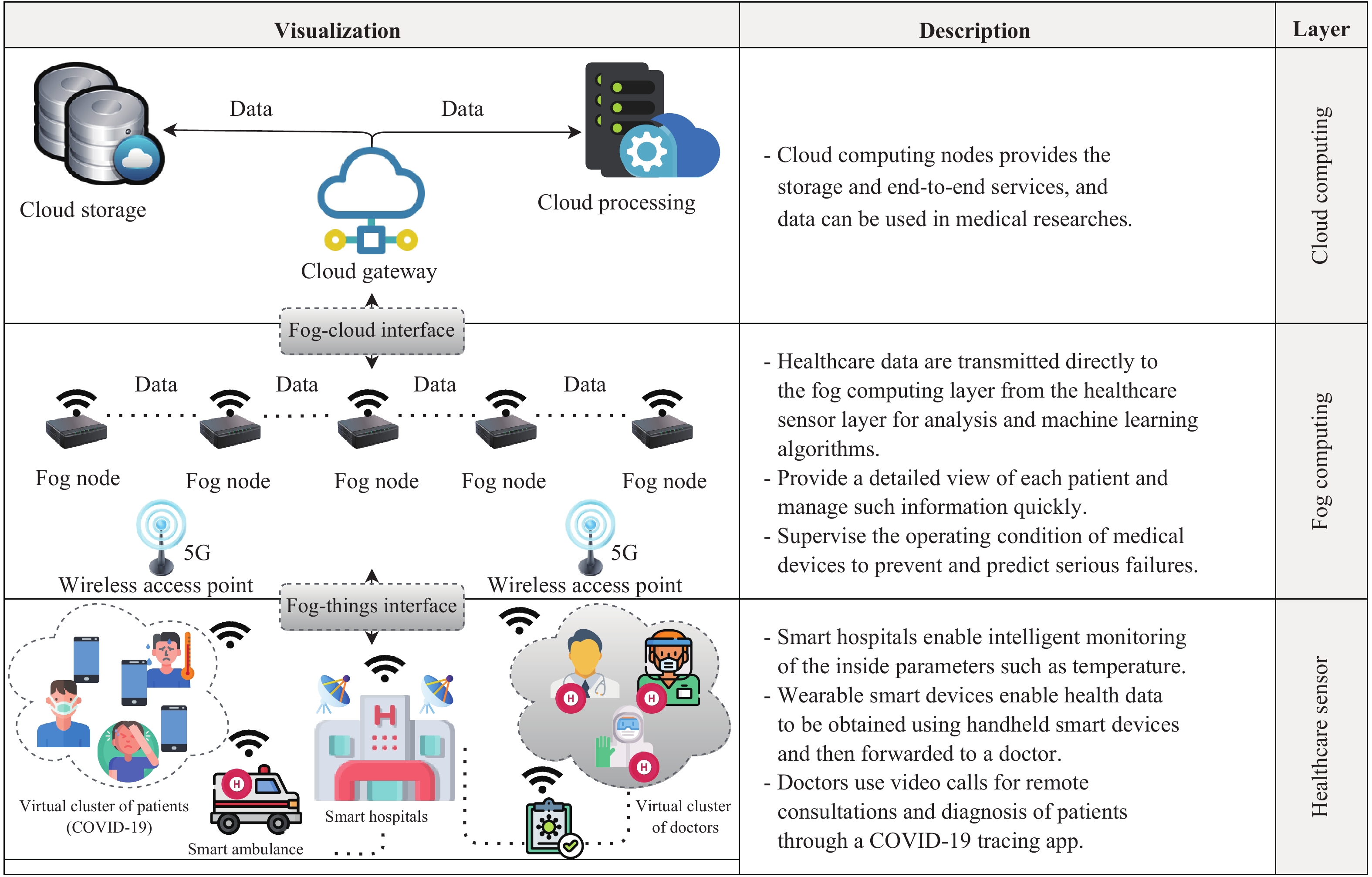
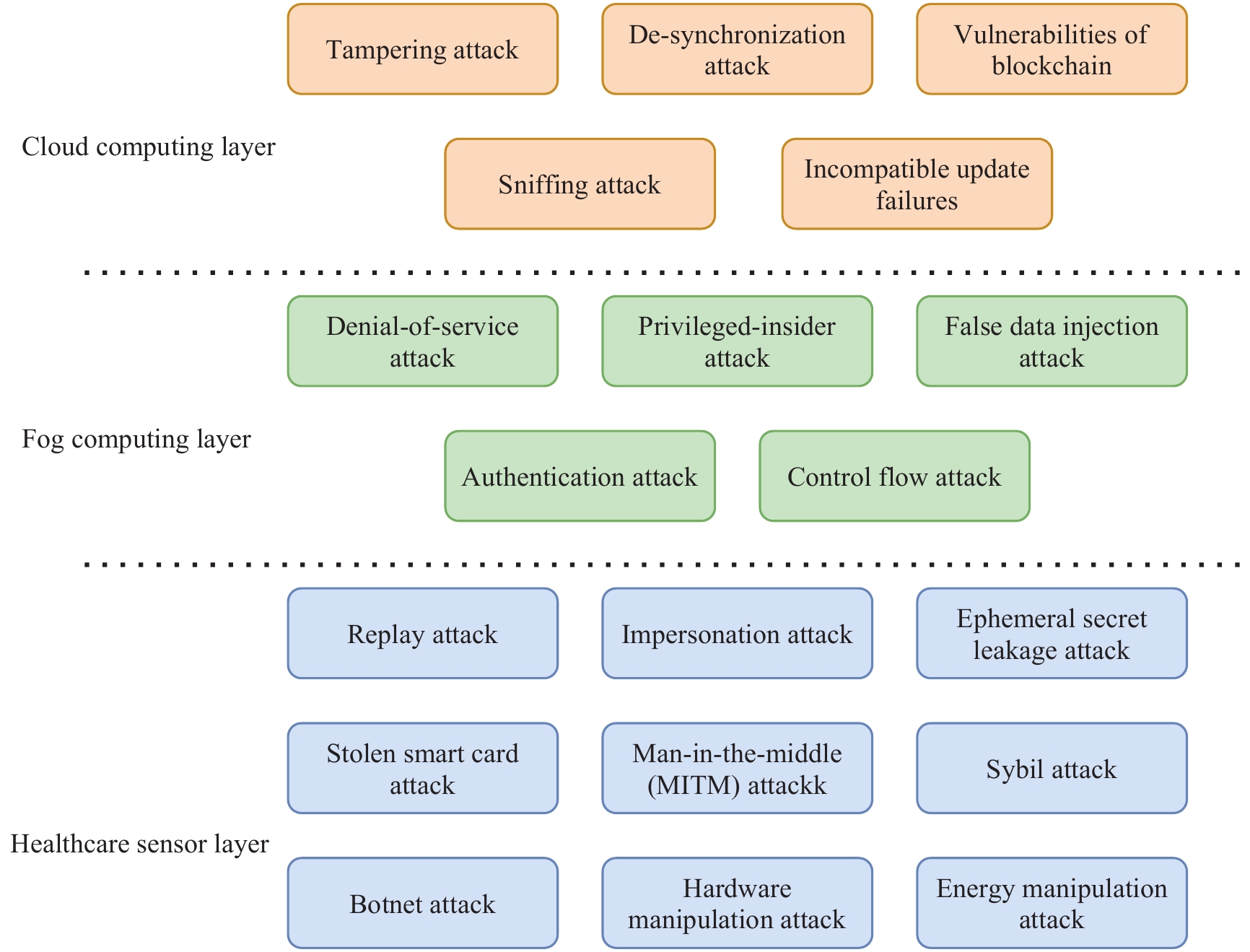
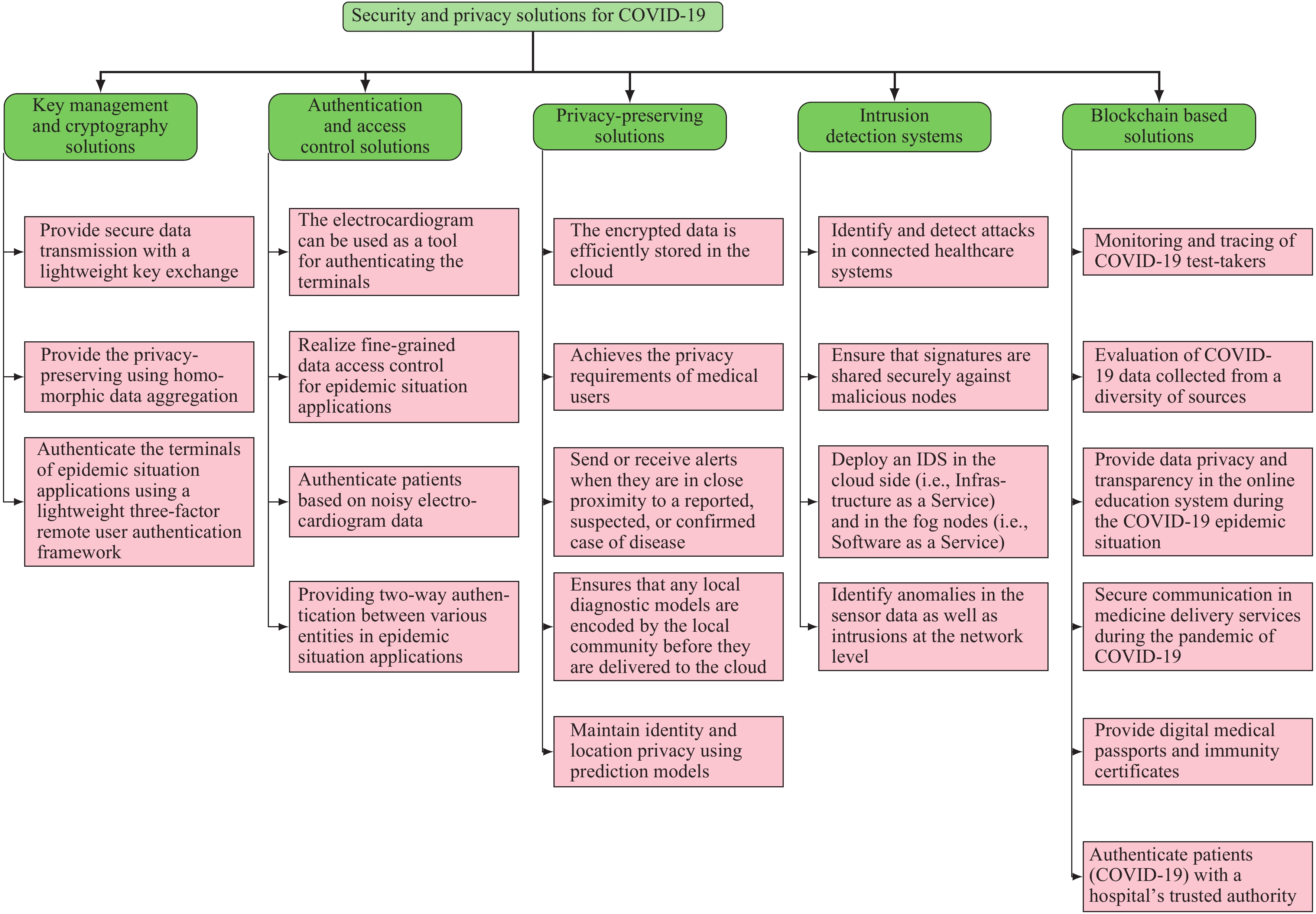
The speed and pace of the transmission of severe acute respiratory syndrome coronavirus 2 (SARS-CoV-2; also referred to as novel Coronavirus 2019 and COVID-19) have resulted in a global pandemic, with significant health, financial, political, and other implications. There have been various attempts to manage COVID-19 and other pandemics using technologies such as Internet of Things (IoT) and 5G/6G communications. However, we also need to ensure that IoT devices used to facilitate COVID-19 monitoring and treatment (e.g., medical IoT devices) are secured, as the compromise of such devices can have significant consequences (e.g., life-threatening risks to COVID-19 patients). Hence, in this paper we comprehensively survey existing IoT-related solutions, potential security and privacy risks and their requirements. For example, we classify existing security and privacy solutions into five categories, namely: authentication and access control solutions, key management and cryptography solutions, blockchain-based solutions, intrusion detection systems, and privacy-preserving solutions. In each category, we identify the associated challenges. We also identify a number of recommendations to inform future research.




















 E-mail Alert
E-mail Alert