2021, 8(4): 718-752.
doi: 10.1109/JAS.2021.1003925
Abstract:
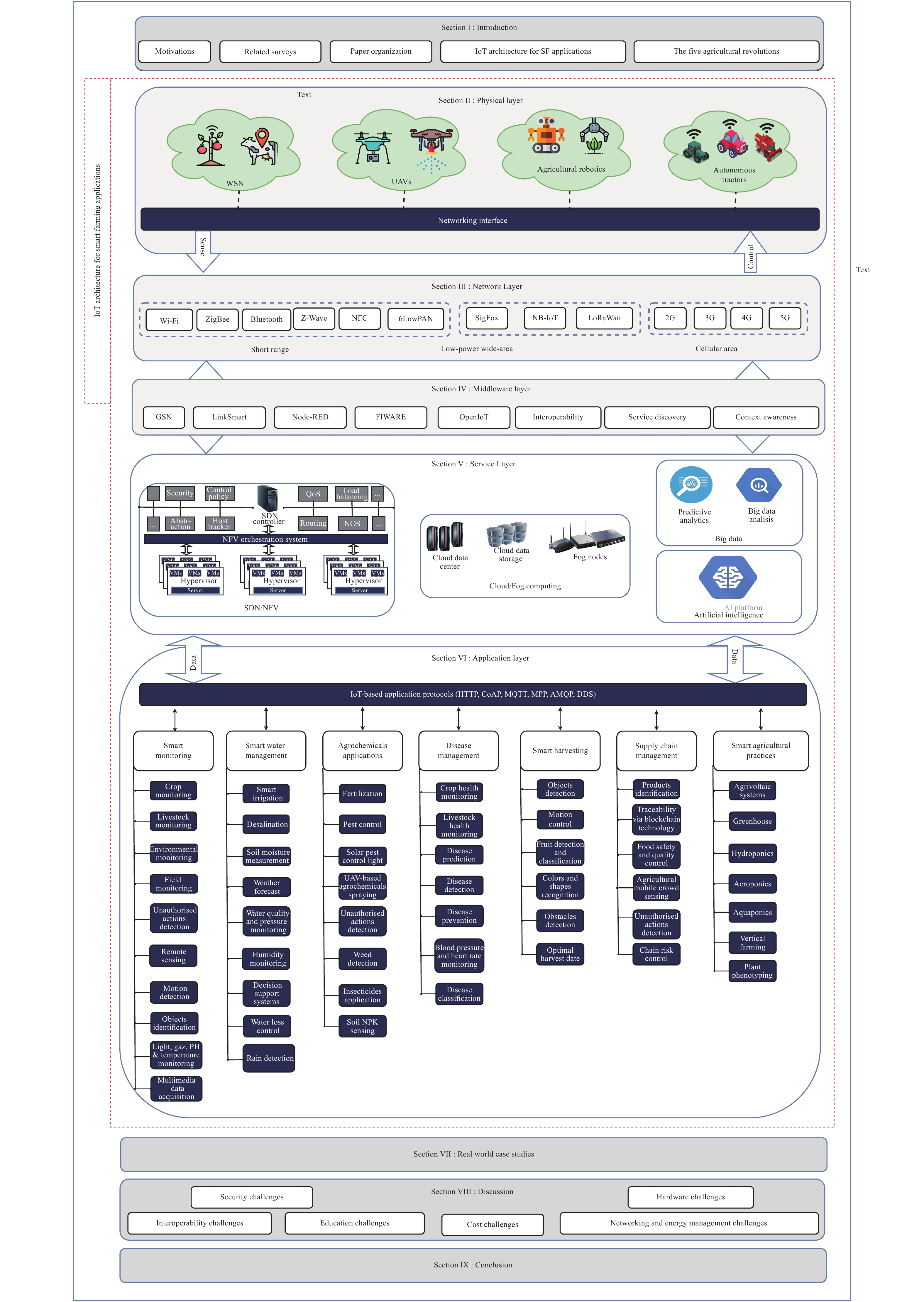
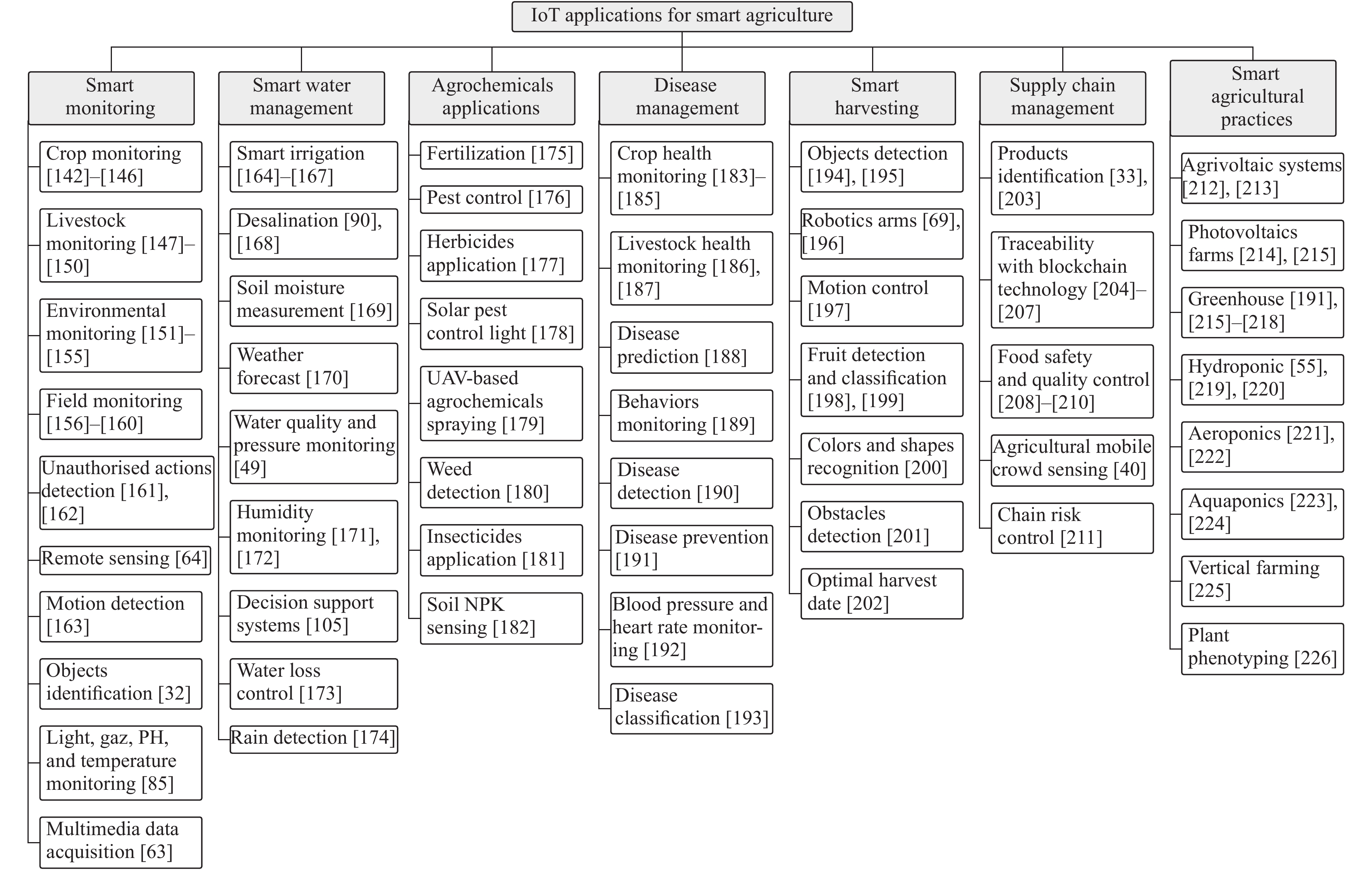
This paper presents a comprehensive review of emerging technologies for the internet of things (IoT)-based smart agriculture. We begin by summarizing the existing surveys and describing emergent technologies for the agricultural IoT, such as unmanned aerial vehicles, wireless technologies, open-source IoT platforms, software defined networking (SDN), network function virtualization (NFV) technologies, cloud/fog computing, and middleware platforms. We also provide a classification of IoT applications for smart agriculture into seven categories: including smart monitoring, smart water management, agrochemicals applications, disease management, smart harvesting, supply chain management, and smart agricultural practices. Moreover, we provide a taxonomy and a side-by-side comparison of the state-of-the-art methods toward supply chain management based on the blockchain technology for agricultural IoTs. Furthermore, we present real projects that use most of the aforementioned technologies, which demonstrate their great performance in the field of smart agriculture. Finally, we highlight open research challenges and discuss possible future research directions for agricultural IoTs.









































 E-mail Alert
E-mail Alert