2021, 8(7): 1271-1280.
doi: 10.1109/JAS.2021.1004009
Abstract:
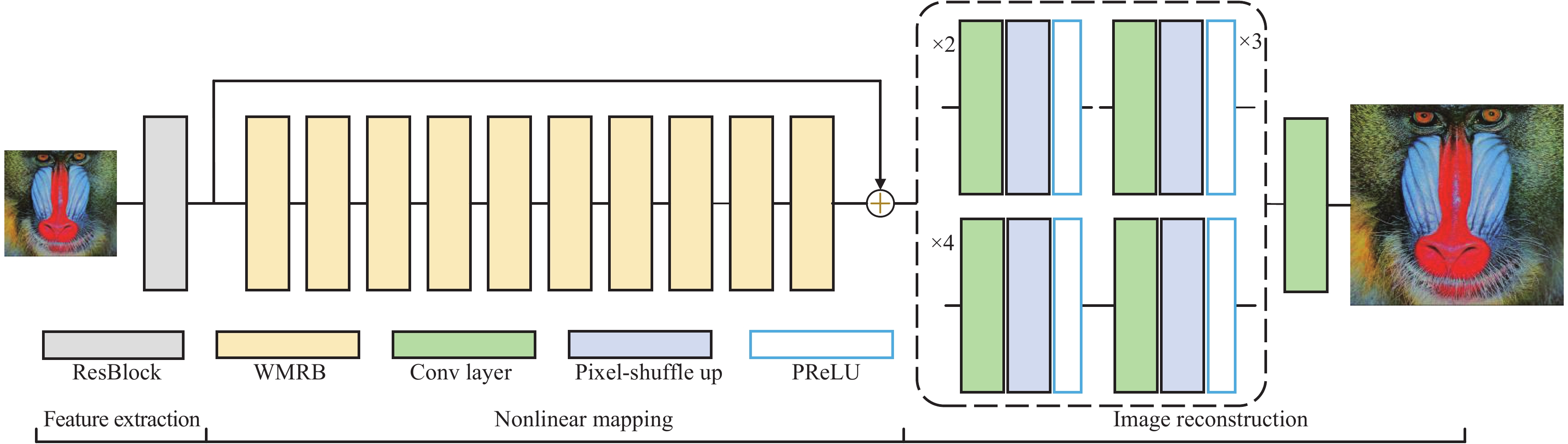
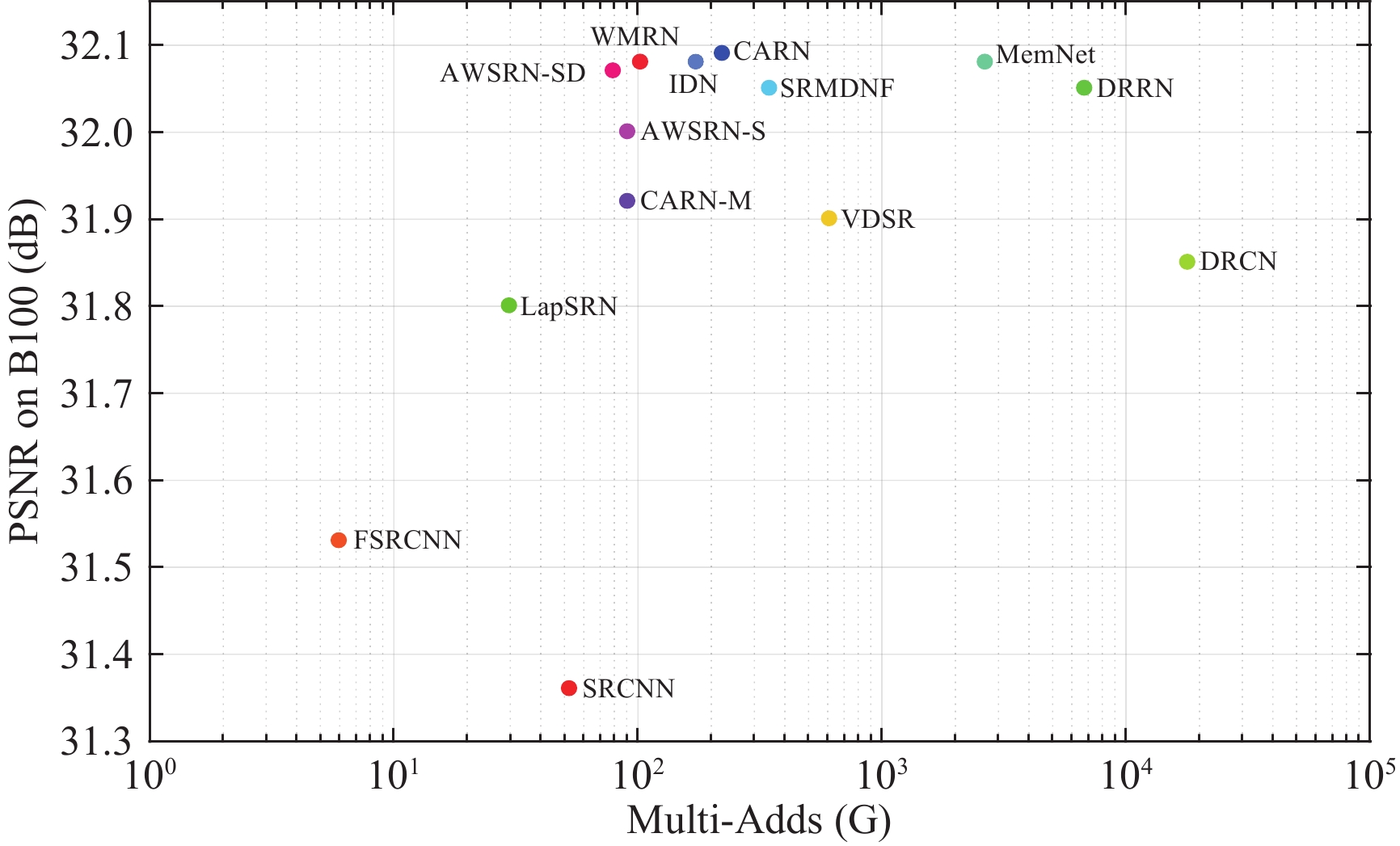
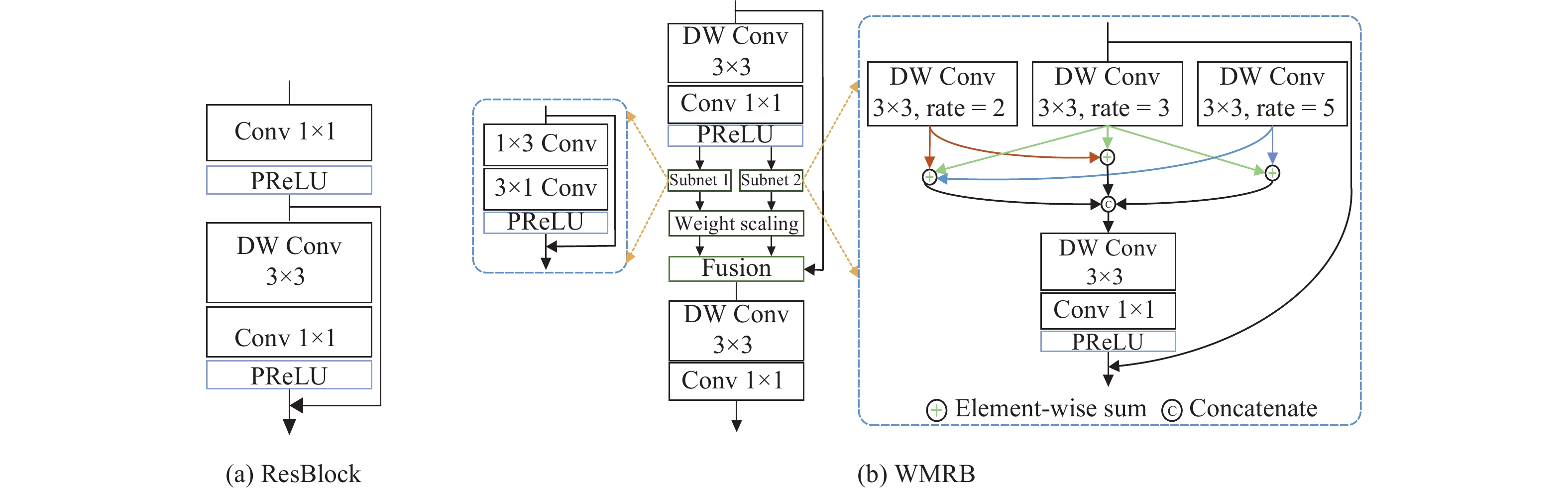
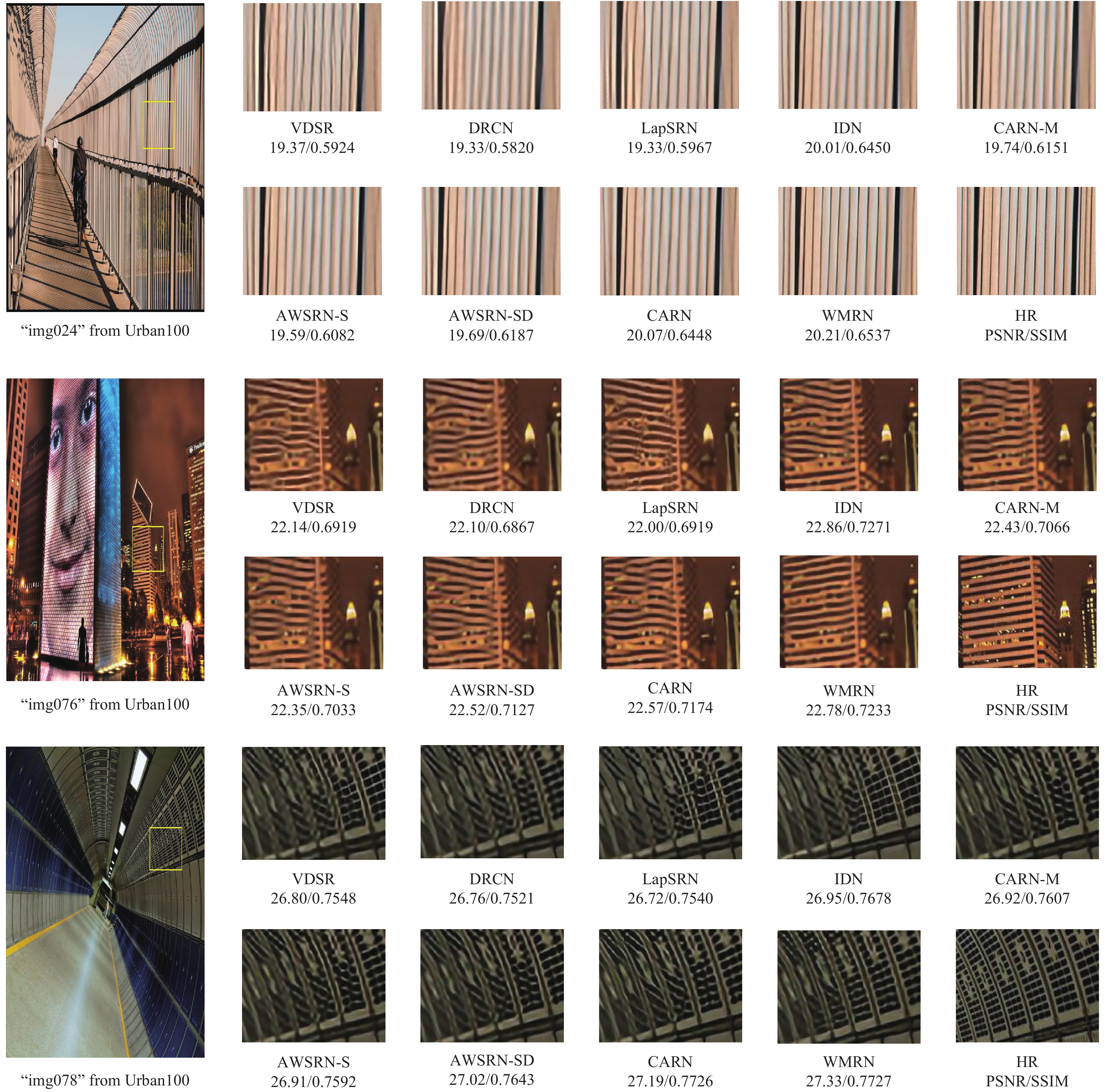
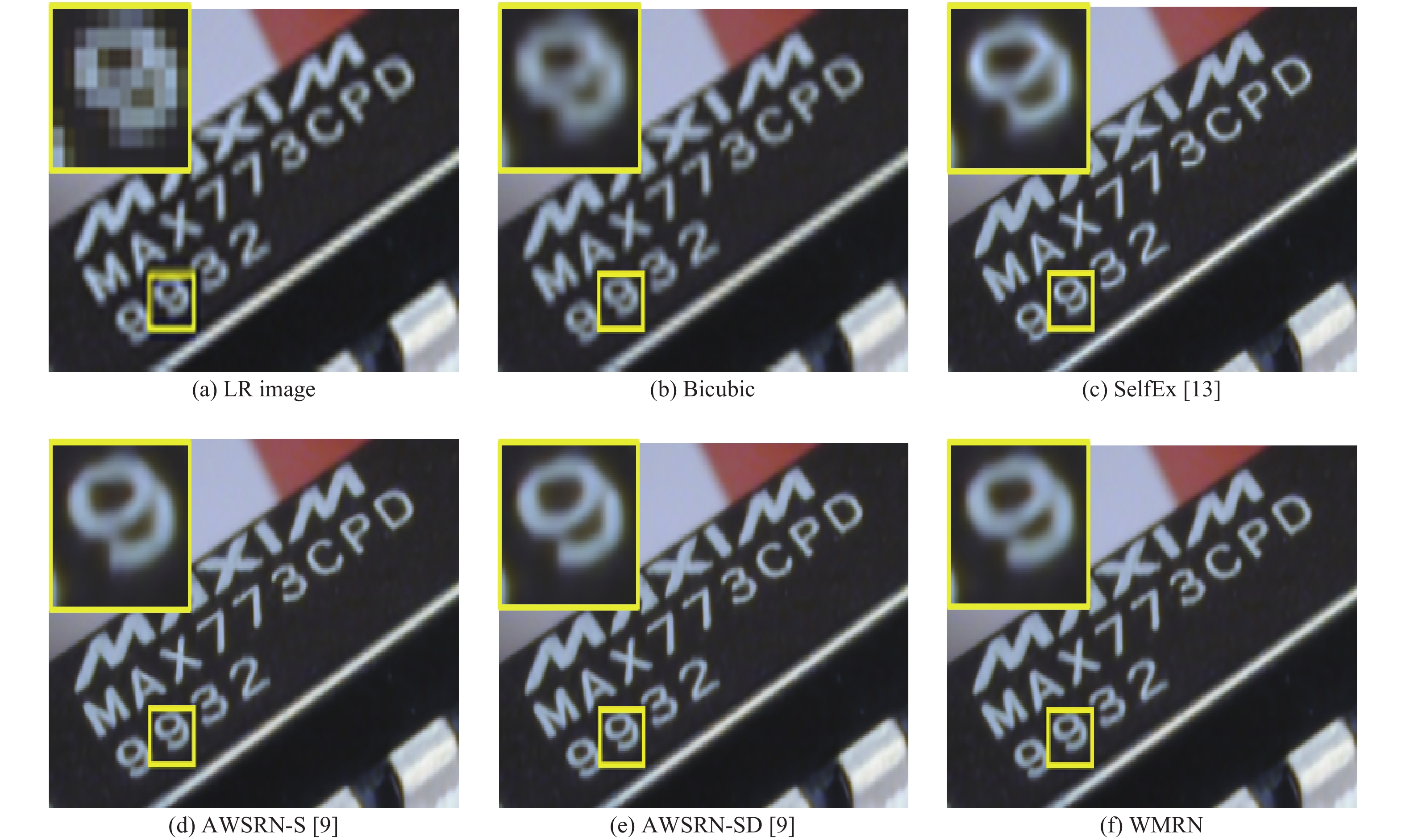
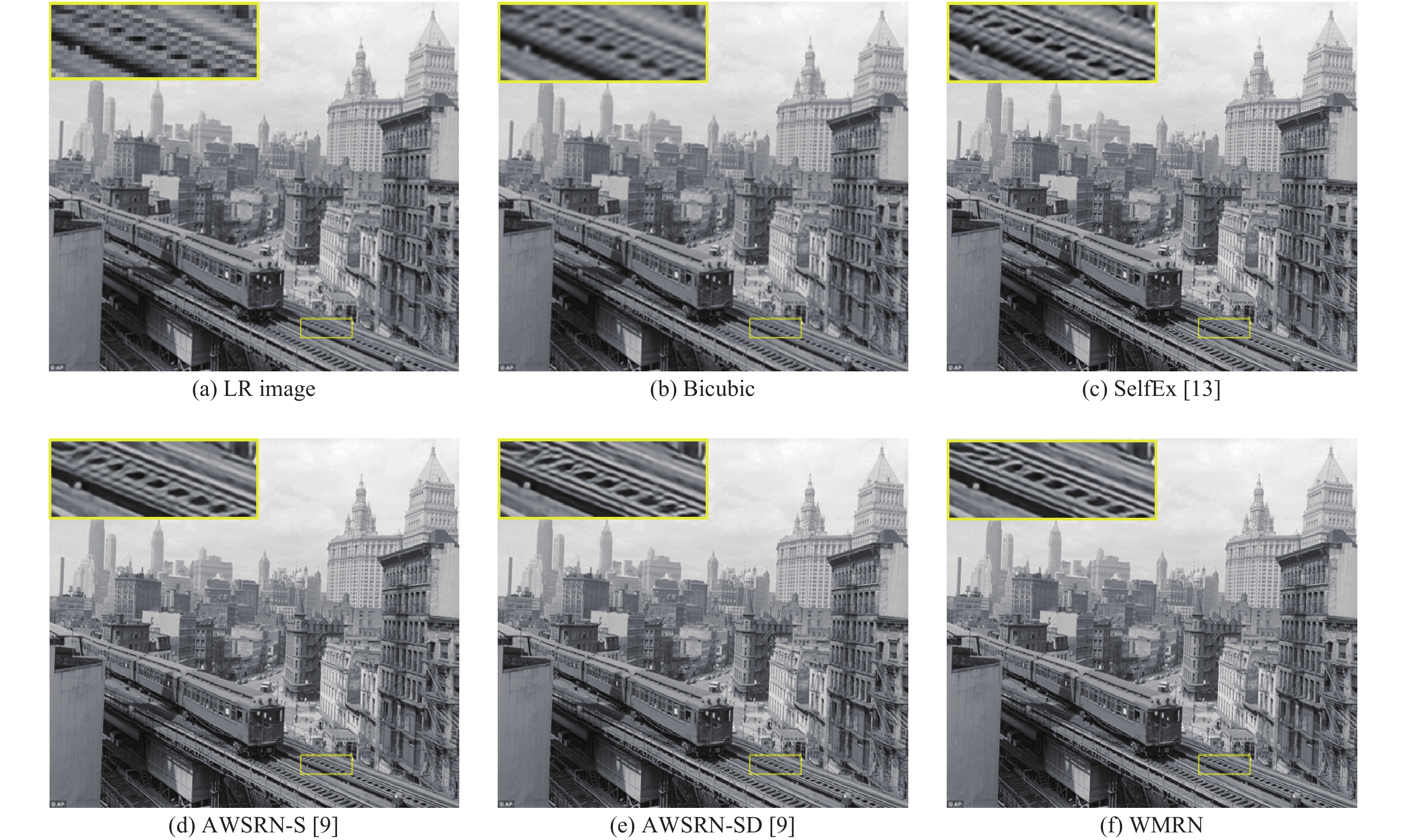
The tradeoff between efficiency and model size of the convolutional neural network (CNN) is an essential issue for applications of CNN-based algorithms to diverse real-world tasks. Although deep learning-based methods have achieved significant improvements in image super-resolution (SR), current CNN-based techniques mainly contain massive parameters and a high computational complexity, limiting their practical applications. In this paper, we present a fast and lightweight framework, named weighted multi-scale residual network (WMRN), for a better tradeoff between SR performance and computational efficiency. With the modified residual structure, depthwise separable convolutions (DS Convs) are employed to improve convolutional operations’ efficiency. Furthermore, several weighted multi-scale residual blocks (WMRBs) are stacked to enhance the multi-scale representation capability. In the reconstruction subnetwork, a group of Conv layers are introduced to filter feature maps to reconstruct the final high-quality image. Extensive experiments were conducted to evaluate the proposed model, and the comparative results with several state-of-the-art algorithms demonstrate the effectiveness of WMRN.
Long Sun, Zhenbing Liu, Xiyan Sun, Licheng Liu, Rushi Lan and Xiaonan Luo, "Lightweight Image Super-Resolution via Weighted Multi-Scale Residual Network," IEEE/CAA J. Autom. Sinica, vol. 8, no. 7, pp. 1271-1280, July 2021. doi: 10.1109/JAS.2021.1004009.











 E-mail Alert
E-mail Alert