A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 4
Volume 9
Issue 4
IEEE/CAA Journal of Automatica Sinica
| Citation: | Y. Mousavi, A. Alfi, I, B. Kucukdemiral, and A. Fekih, “Tube-based model reference adaptive control for vibration suppression of active suspension systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 1–3, Apr. 2022.

|

| [1] |
G. Georgiou, G. Verros, and S. Natsiavas, “Multi-objective optimization of quarter-car models with a passive or semi-active suspension system,” Vehicle System Dynamics, vol. 45, no. 1, pp. 77–92, 2007. doi: 10.1080/00423110600812925
|
| [2] |
H. Pan, W. Sun, X. Jing, H. Gao, and J. Yao, “Adaptive tracking control for active suspension systems with non-ideal actuators,” Journal of Sound and Vibration, vol. 399, pp. 2–20, 2017. doi: 10.1016/j.jsv.2017.03.011
|
| [3] |
K. El Majdoub, F. Giri, and F.-Z. Chaoui, “Adaptive backstepping control design for semi-active suspension of half-vehicle with magnetorheological damper,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 3, pp. 582–596, 2020.
|
| [4] |
J. Na, Y. Huang, X. Wu, S.-F. Su, and G. Li, “Adaptive finite-time fuzzy control of nonlinear active suspension systems with input delay,” IEEE Trans. Cybernetics, vol. 50, no. 6, pp. 2639–2650, 2019.
|
| [5] |
G. I. Mustafa, H. Wang, and Y. Tian, “Vibration control of an active vehicle suspension systems using optimized model-free fuzzy logic controller based on time delay estimation,” Advances in Engineering Software, vol. 127, pp. 141–149, 2019. doi: 10.1016/j.advengsoft.2018.04.009
|
| [6] |
C. Onat, I. Kucukdemiral, S. Sivrioglu, I. Yuksek, and G. Cansever, “LPV gain-scheduling controller design for a non-linear quarter-vehicle active suspension system,” Transactions of the Institute of Measurement and Control, vol. 31, no. 1, pp. 71–95, 2009. doi: 10.1177/0142331208090630
|
| [7] |
H. Pang, X. Zhang, J. Chen, and K. Liu, “Design of a coordinated adaptive backstepping tracking control for nonlinear uncertain active suspension system,” Applied Mathematical Modelling, vol. 76, pp. 479–494, 2019. doi: 10.1016/j.apm.2019.06.030
|
| [8] |
Q. Wang, Y. Zhao, H. Xu, and Y. Deng, “Adaptive backstepping control with grey signal predictor for nonlinear active suspension system matching mechanical elastic wheel,” Mechanical Systems and Signal Processing, vol. 131, pp. 97–111, 2019. doi: 10.1016/j.ymssp.2019.05.046
|
| [9] |
Y. Li, Y. Liu, and S. Tong, “Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints,” IEEE Trans. Neural Networks and Learning Systems, 2021.
|
| [10] |
H. Pang, F. Liu, and Z. Xu, “Variable universe fuzzy control for vehicle semi-active suspension system with mr damper combining fuzzy neural network and particle swarm optimization,” Neurocomputing, vol. 306, pp. 130–140, 2018. doi: 10.1016/j.neucom.2018.04.055
|
| [11] |
F. Zhang, J. Hua, and Y. Li, “Indirect adaptive fuzzy control of siso nonlinear systems with input-output nonlinear relationship,” IEEE Trans. Fuzzy Systems, vol. 26, no. 5, pp. 2699–2708, 2018. doi: 10.1109/TFUZZ.2018.2800714
|
| [12] |
X. Min, Y. Li, and S. Tong, “Adaptive fuzzy optimal control for a class of active suspension systems with full-state constraints,” IET Intelligent Transport Systems, vol. 14, no. 5, pp. 371–381, 2020. doi: 10.1049/iet-its.2019.0187
|
| [13] |
M. Haddar, R. Chaari, S. C. Baslamisli, F. Chaari, and M. Haddar, “Intelligent pd controller design for active suspension system based on robust model-free control strategy,” Proc. the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science, vol. 233, no. 14, pp. 4863–4880, 2019. doi: 10.1177/0954406219836443
|
| [14] |
J. Theunissen, A. Sorniotti, P. Gruber, S. Fallah, M. Ricco, M. Kvasnica, and M. Dhaens, “Regionless explicit model predictive control of active suspension systems with preview,” IEEE Trans. Industrial Electronics, vol. 67, no. 6, pp. 4877–4888, 2019.
|
| [15] |
L. Ovalle, H. Ríos, and H. Ahmed, “Robust control for an active suspension system via continuous sliding-mode controllers,” Engineering Science and Technology, an Int. Journal, 2021.
|
| [16] |
V. S. Deshpande, B. Mohan, P. Shendge, and S. Phadke, “Disturbance observer based sliding mode control of active suspension systems,” Journal of Sound and Vibration, vol. 333, no. 11, pp. 2281–2296, 2014. doi: 10.1016/j.jsv.2014.01.023
|
| [17] |
D. Zhang and B. Wei, “A review on model reference adaptive control of robotic manipulators,” Annual Reviews in Control, vol. 43, pp. 188–198, 2017. doi: 10.1016/j.arcontrol.2017.02.002
|
| [18] |
N. Aguila-Camacho and M. A. Duarte-Mermoud, “Improving the control energy in model reference adaptive controllers using fractional adaptive laws,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 3, pp. 332–337, 2016. doi: 10.1109/JAS.2016.7508809
|
| [19] |
A. T. Nguyen, M. S. Rafaq, H. H. Choi, and J.-W. Jung, “A model reference adaptive control based speed controller for a surface-mounted permanent magnet synchronous motor drive,” IEEE Trans. Industrial Electronics, vol. 65, no. 12, pp. 9399–9409, 2018. doi: 10.1109/TIE.2018.2826480
|
| [20] |
M. S. Amiri, R. Ramli, and M. F. Ibrahim, “Initialized model reference adaptive control for lower limb exoskeleton,” IEEE Access, vol. 7, pp. 167 210–167 220, 2019. doi: 10.1109/ACCESS.2019.2954110
|
| [21] |
J. Gao, P. Wu, T. Li, and A. Proctor, “Optimization-based model reference adaptive control for dynamic positioning of a fully actuated underwater vehicle,” Nonlinear Dynamics, vol. 87, no. 4, pp. 2611–2623, 2017. doi: 10.1007/s11071-016-3214-2
|
| [22] |
C. M. Ho, D. T. Tran, and K. K. Ahn, “Adaptive sliding mode control based nonlinear disturbance observer for active suspension with pneumatic spring,” Journal of Sound and Vibration, p. 116241, 2021.
|
| [23] |
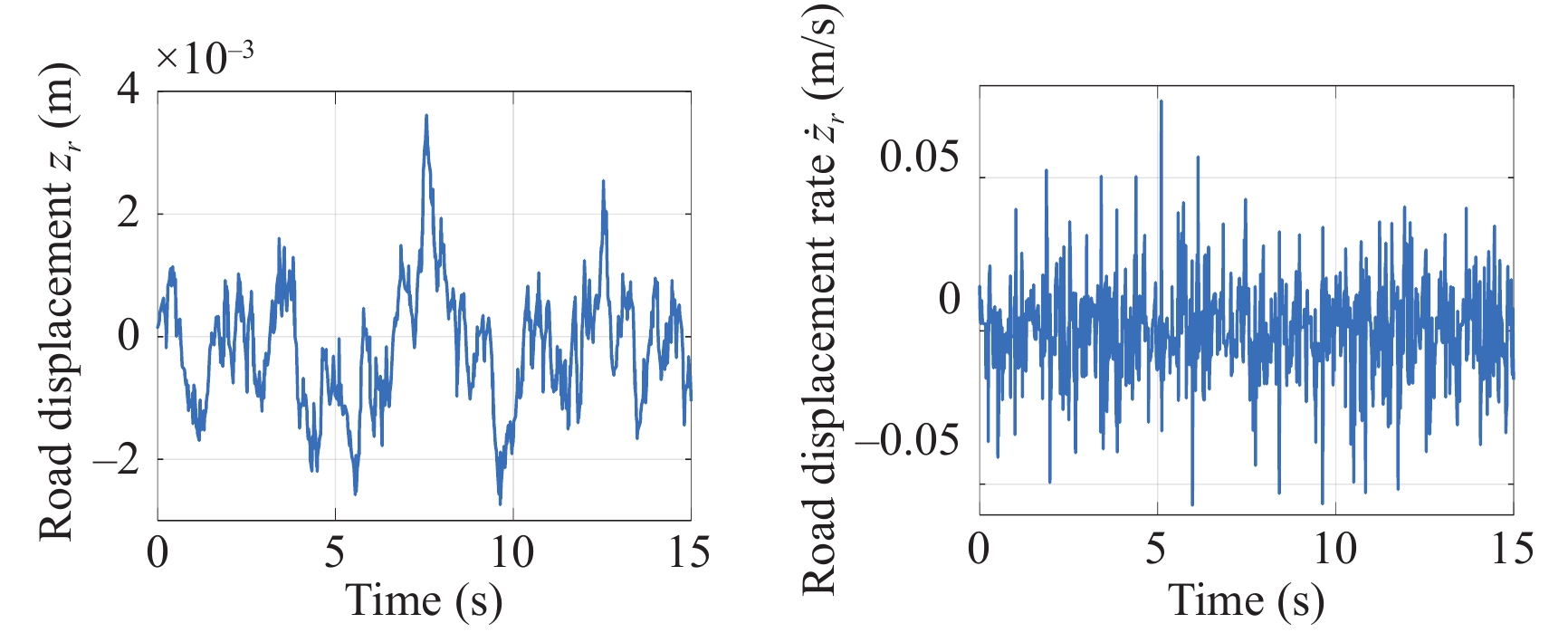
F. Tyan, Y.-F. Hong, S.-H. Tu, W. S. Jeng, et al., “Generation of random road profiles,” Journal of Advanced Engineering, vol. 4, no. 2, pp. 1373–1378, 2009.
|
| [24] |
T. C. ISO/TC, M. Vibration, S. S. S. Measurement, E. of Mechanical Vibration, and S. as Applied to Machines, Mechanical Vibration–Road Surface Profiles–Reporting of Measured Data, vol. 8608. Int. Organization for Standardization, 1995.
|
Figures(3) / Tables(1)






 DownLoad:
DownLoad: