A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 12
Issue 10
Volume 12
Issue 10
IEEE/CAA Journal of Automatica Sinica
| Citation: | H. Liu, Q.-L. Han, and Y. Li, “Set-valued state estimation of nonlinear discrete-time systems and its application to attack detection,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 10, pp. 2015–2025, Oct. 2025. doi: 10.1109/JAS.2023.124146

|

| [1] |
M. Casini, A. Garulli, and A. Vicino, “Set membership state estimation for discrete-time linear systems with binary sensor measurements,” Automatica, vol. 159, p. 111396, 2024.
|
| [2] |
Y. Wang, V. Puig, and G. Cembrano, “Set-membership approach and Kalman observer based on zonotopes for discrete-time descriptor systems,” Automatica, vol. 93, pp. 435–443, 2018. doi: 10.1016/j.automatica.2018.03.082
|
| [3] |
C. Combastel, “Zonotopes and Kalman observers: Gain optimality under distinct uncertainty paradigms and robust convergence,” Automatica, vol. 55, pp. 265–273, 2015. doi: 10.1016/j.automatica.2015.03.008
|
| [4] |
Z. H. Wang, W. T. Tang, Q. H. Zhang, V. Puig, and Y. Shen, “Zonotopic state estimation and fault detection for systems with time-invariant uncertainties,” IFAC-PapersOnLine, vol. 51, no. 24, pp. 494–499, 2018. doi: 10.1016/j.ifacol.2018.09.622
|
| [5] |
N. Meslem, A. Hably, and T. Raïssi, “Zonotopic unknown input state estimator for discrete-time linear systems,” Syst. Control Lett., vol. 162, p. 105168, 2022. doi: 10.1016/j.sysconle.2022.105168
|
| [6] |
Y. Wang, V. Puig, F. Xu, and G. Cembrano, “Robust fault detection and isolation based on zonotopic unknown input observers for discrete-time descriptor systems,” J. Franklin Inst., vol. 356, no. 10, pp. 5293–5314, 2019. doi: 10.1016/j.jfranklin.2019.04.014
|
| [7] |
D. Silvestre, “Set-valued estimators for uncertain linear parameter-varying systems,” Syst. Control Lett., vol. 166, p. 105311, 2022. doi: 10.1016/j.sysconle.2022.105311
|
| [8] |
A. A. D. Paula, G. V. Raffo, and B. O. S. Teixeira, “Zonotopic filtering for uncertain nonlinear systems: Fundamentals, implementation aspects, and extensions,” IEEE Control Systems, vol. 42, no. 1, pp. 19–51, 2022.
|
| [9] |
H. Ethabet, D. Rabehi, D. Efimov, and T. Raïssi, “Interval estimation for continuous-time switched linear systems,” Automatica, vol. 90, pp. 230–238, 2018. doi: 10.1016/j.automatica.2017.12.035
|
| [10] |
L. Chisci, A. Garulli, and G. Zappa, “Recursive state bounding by parallelotopes,” Automatica, vol. 32, no. 7, pp. 1049–1055, 1996. doi: 10.1016/0005-1098(96)00048-9
|
| [11] |
Y. S. Liu, Y. Zhao, and F. L. Wu, “Ellipsoidal state-bounding-based set-membership estimation for linear system with unknown-but-bounded disturbances,” IET Control Theory Appl., vol. 10, no. 4, pp. 431–442, 2016. doi: 10.1049/iet-cta.2015.0654
|
| [12] |
Y. Wang, Z. H. Wang, V. Puig, and G. Cembrano, “Zonotopic set-membership state estimation for discrete-time descriptor LPV systems,” IEEE Trans. Autom. Control, vol. 64, no. 5, pp. 2092–2099, 2019. doi: 10.1109/TAC.2018.2863659
|
| [13] |
C. Trapiello, V. Puig, and D. Rotondo, “A zonotopic set-invariance analysis of replay attacks affecting the supervisory layer,” Syst. Control Lett., vol. 157, p. 105056, 2021. doi: 10.1016/j.sysconle.2021.105056
|
| [14] |
J. K. Scott, D. M. Raimondo, G. R. Marseglia, and R. D. Braatz, “Constrained zonotopes: A new tool for set-based estimation and fault detection,” Automatica, vol. 69, pp. 126–136, 2016. doi: 10.1016/j.automatica.2016.02.036
|
| [15] |
B. S. Rego, G. V. Raffo, J. K. Scott, and D. M. Raimondo, “Guaranteed methods based on constrained zonotopes for set-valued state estimation of nonlinear discrete-time systems,” Automatica, vol. 111, p. 108614, 2020. doi: 10.1016/j.automatica.2019.108614
|
| [16] |
B. S. Rego, J. K. Scott, D. M. Raimondo, and G. V. Raffo, “Set-valued state estimation of nonlinear discrete-time systems with nonlinear invariants based on constrained zonotopes,” Automatica, vol. 129, p. 109638, 2021. doi: 10.1016/j.automatica.2021.109638
|
| [17] |
S. Kousik, A. Dai, and G. X. Gao, “Ellipsotopes: Uniting ellipsoids and zonotopes for reachability analysis and fault detection,” IEEE Trans. Autom. Control, vol. 68, no. 6, pp. 3440–3452, 2023. doi: 10.1109/TAC.2022.3191750
|
| [18] |
N. Kochdumper, and M. Althoff, “Sparse polynomial zonotopes: A novel set repersentation for reachability analysis,” IEEE Trans. Autom. Control, vol. 66, no. 9, pp. 4043–4058, 2021. doi: 10.1109/TAC.2020.3024348
|
| [19] |
N. Kochdumper and M. Althoff, “Constrained polynomial zonotopes,” arXiv preprint, arXiv: 2005.00849v1, 2020.
|
| [20] |
Y. P. Yang, C. Peng, and Q. L. Han, “The synchronization of networked harmonic oscillators under denial-of-service attacks,” IEEE Trans. Syst. Man Cybern. Syst., vol. 53, no. 2, pp. 789–800, 2023. doi: 10.1109/TSMC.2022.3189403
|
| [21] |
K. K. Zhang, C. Keliris, T. Parisini, and M. M. Polycarpou, “Identification of sensor replay attacks and physical faults for cyber-physical systems,” IEEE Control Syst. Lett., vol. 6, pp. 1178–1183, 2022. doi: 10.1109/LCSYS.2021.3089674
|
| [22] |
Y. Y. Zhang and S. Li, “Kinematic control of serial manipulators under false data injection attack,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 4, pp. 1009–1019, 2023. doi: 10.1109/JAS.2023.123132
|
| [23] |
X. Gong, M. V. Basin, Z. G. Feng, T. W. Huang, and Y. K. Cui, “Resilient time-varying formation-tracking of multi-UAV systems against composite attacks: A two-layered framework,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 4, pp. 969–984, 2023. doi: 10.1109/JAS.2023.123339
|
| [24] |
J. Giraldo, Da. Urbina, A. Cardenas, J. Valente, M. Faisal, J. Ruths, N. O. Tippenhauer, H. Sandberg, and R. Candell, “A survey of physics-based attack detection in cyber-physical systems,” ACM Computing Surveys, vol. 51, no. 4, p. 76, 2018.
|
| [25] |
G. Franzè, F. Tedesco, and D. Famularo, “Resilience against replay attacks: A distributed model predictive control scheme for networked multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 3, pp. 628–640, 2021. doi: 10.1109/JAS.2020.1003542
|
| [26] |
C. W. Wu, Z. R. Hu, J. X. Liu, and L. G. Wu, “Secure estimation for cyber-physical systems via sliding mode,” IEEE Trans. Cybern., vol. 48, no. 12, pp. 3420–3431, 2018. doi: 10.1109/TCYB.2018.2825984
|
| [27] |
T. Alamo, J. M. Bravo, and E. F. Camacho, “Guaranteed state estimation by zonotopes,” Automatica, vol. 41, pp. 1035–1043, 2005. doi: 10.1016/j.automatica.2004.12.008
|
| [28] |
A. A. De Paula, G. V. Raffo, and B. O. S. Teixeira, “Applications of control: Zonotopic filtering for uncertain nonlinear systems,” IEEE Control Syst., vol. 42, no. 1, pp. 19–51, 2022. doi: 10.1109/MCS.2021.3122311
|
| [29] |
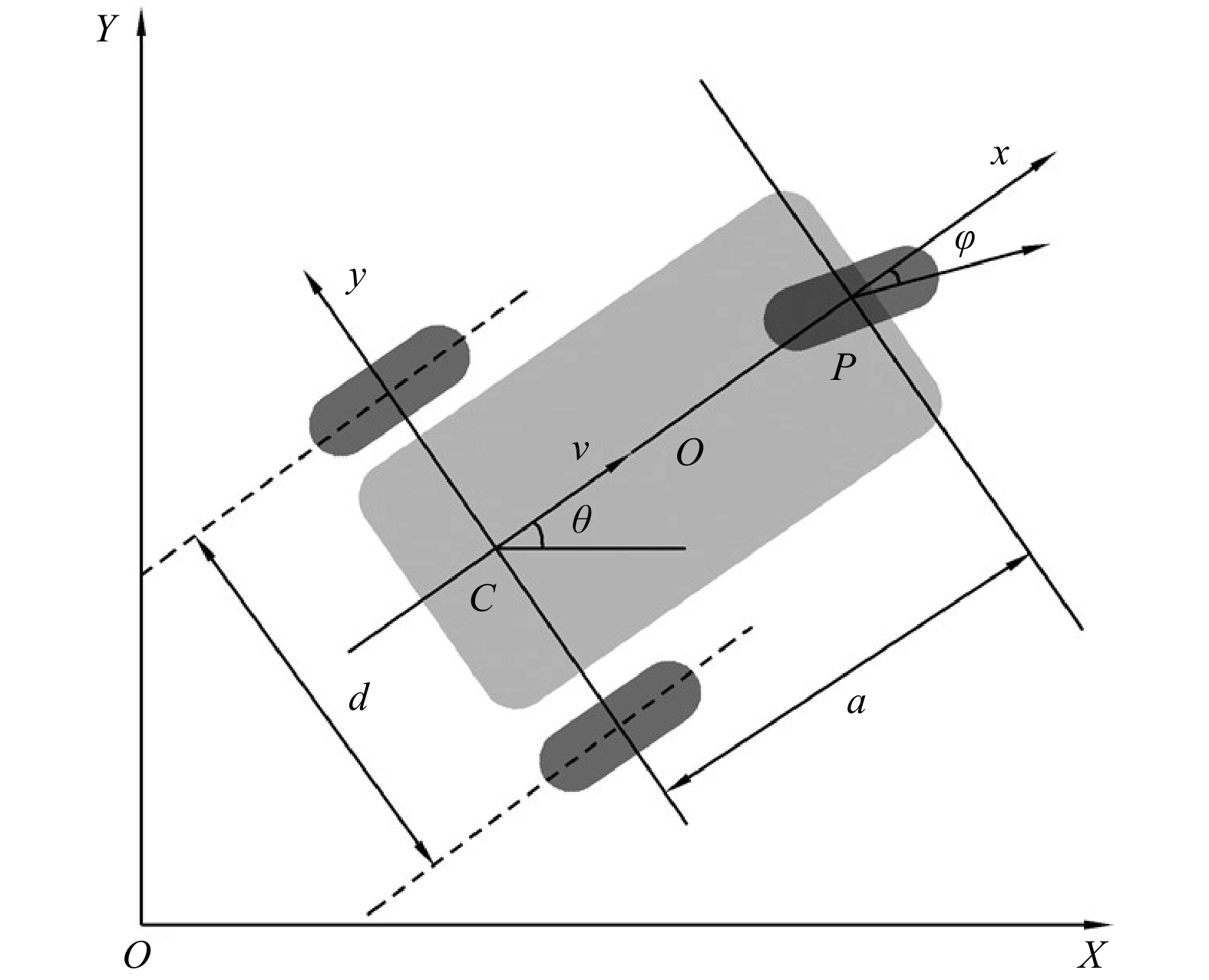
H. Mirzaeinejad, “Optimization-based nonlinear control laws with increased robustness for trajectory tracking of non-holonomic wheeled mobile robots,” Transport. Res. C-Emer., vol. 101, pp. 1–17, 2019. doi: 10.1016/j.trc.2019.02.003
|
| [30] |
G. F. Franklin, J. D. Powell, and A. Emami-Naeini, Feedback Control of Dynamic Systems. Pearson Education Ltd., London, 7th Edition, 2014.
|
| [31] |
V. Mistler, A. Benallegue, and N. K. M’Sirdi, “Exact linearization and noninteracting control of a 4 rotors helicopter via dynamic feedback,” in Proc. 10th IEEE Int. Workshop Robot and Human Interactive Communication, pp. 586–593, 2001.
|
Figures(7) / Tables(2)






 DownLoad:
DownLoad: