A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
| Citation: | Z. Gao, D. Zhang, and S. Zhu, “Hierarchical secure steering control of in-wheel motor driven electric vehicle under cyber-physical constraints,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 0, pp. 1–3, Jan. 2024.

|

| [1] |
Z. Liu, S. Cheng, X. Ji, L. Li and L. Wei, “A hierarchical anti-disturbance path tracking control scheme for autonomous vehicles under complex driving conditions,” IEEE Trans. Veh. Technol., vol. 70, no. 11, pp. 11244–11254, 2021. doi: 10.1109/TVT.2021.3112524
|
| [2] |
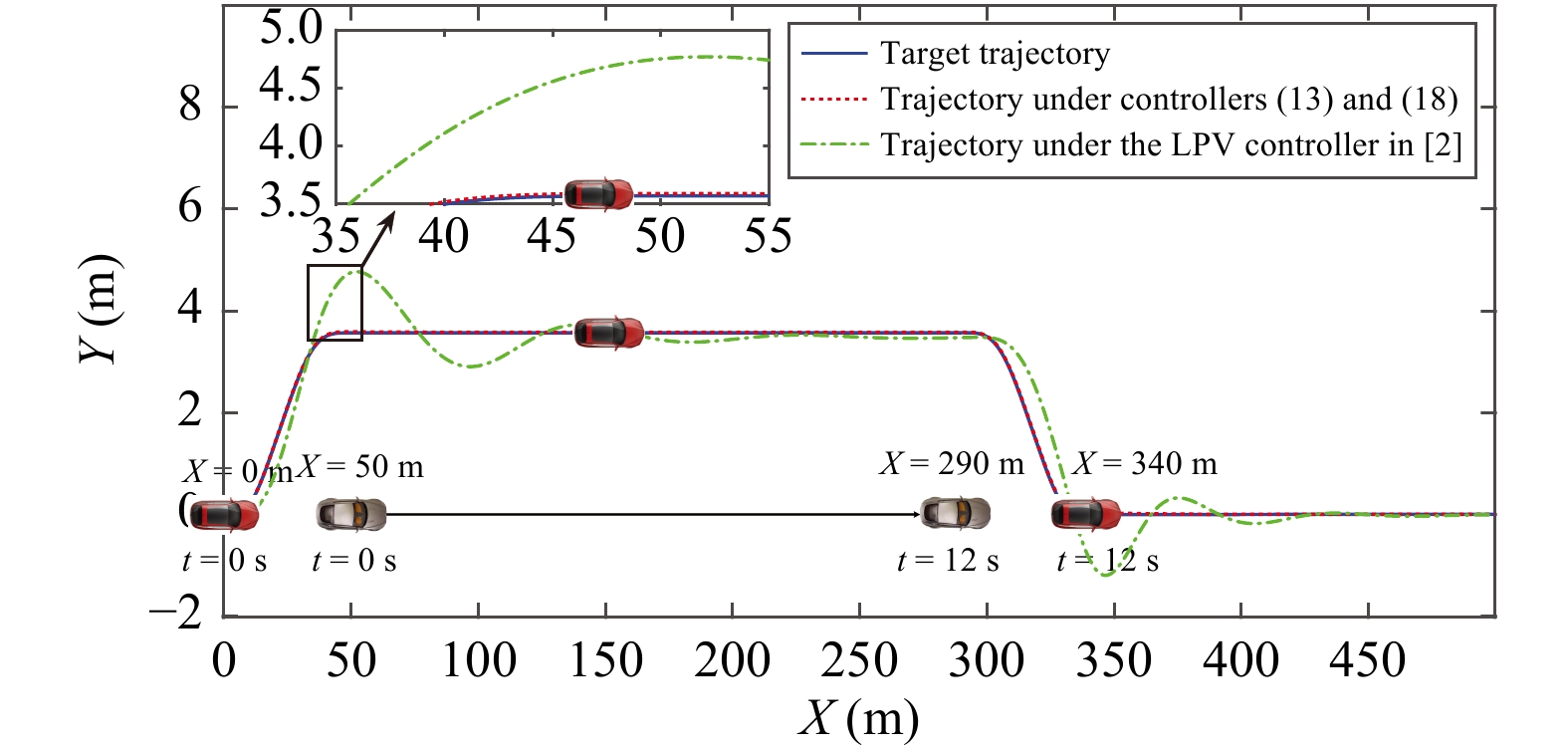
J. Zhao, W. Li, C. Hu, G. Guo, Z. Xie, and P. Wong, “Robust gain-scheduling path following control of autonomous vehicles considering stochastic network-induced delay,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 12, pp. 23324–23333, 2022. doi: 10.1109/TITS.2022.3207023
|
| [3] |
Y. Tian, X. Cao, X. Wang, and Y. Zhao, “Four wheel independent drive electric vehicle lateral stability control strategy,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 6, pp. 1542–1554, 2020. doi: 10.1109/JAS.2019.1911729
|
| [4] |
S. Zou and W. Zhao, “Synchronization and stability control of dual-motor intelligent steer-by-wire vehicle,” Mech. Syst. Signal Proc., vol. 145, p. 106925, 2020. doi: 10.1016/j.ymssp.2020.106925
|
| [5] |
I. Ahmad, X. Ge, and Q.-L. Han, “Decentralized dynamic event-triggered communication and active suspension control of in-wheel motor driven electric vehicles with dynamic damping,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 971–986, 2021. doi: 10.1109/JAS.2021.1003967
|
| [6] |
Z. Pang, G. Liu, D. Zhou, F. Hou, and D. Sun, “Two-channel false data injection attacks against output tracking control of networked systems,” IEEE Trans. Ind. Electron., vol. 63, no. 5, pp. 3242–3251, 2016. doi: 10.1109/TIE.2016.2535119
|
| [7] |
L. An, G. Yang, C. Deng, and C. Wen, “Event-triggered reference governors for collisions-free leader-following coordination under unreliable communication topologies” IEEE Trans. Autom. Control, DOI: 10.1109/TAC.2023.3291654,2023.
|
| [8] |
W. Liu, J. Sun, G. Wang, F. Bullo, and J. Chen, “Data-driven resilient predictive control under denial-of-service,” IEEE Trans. Autom. Control, vol. 68, no. 8, pp. 4722–4737, 2023. doi: 10.1109/TAC.2022.3209399
|
| [9] |
D. Ding, Z. Wang, Q.-L. Han, and G. Wei, “Security control for discrete-time stochastic nonlinear systems subject to deception attacks,” IEEE Trans. Syst. Man Cybern. −Syst., vol. 48, no. 5, pp. 779–789, 2018. doi: 10.1109/TSMC.2016.2616544
|
| [10] |
X. Han, Y. Zhou, K. Chen, H. Qiu, M. Qiu, Y. Liu, and T. Zhang, “ADS-lead: Lifelong anomaly detection in autonomous driving systems,” IEEE Trans. Intell. Transp. Syst., vol. 24, no. 1, pp. 1039–1051, 2023. doi: 10.1109/TITS.2021.3122906
|
| [11] |
G. Duan, “High-order fully actuated system approaches: Part V. Robust adaptive control,” Int. J. Syst. Sci., vol. 52, no. 10, pp. 2129–2143, 2021. doi: 10.1080/00207721.2021.1879964
|
Figures(2) / Tables(1)






 DownLoad:
DownLoad: