A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
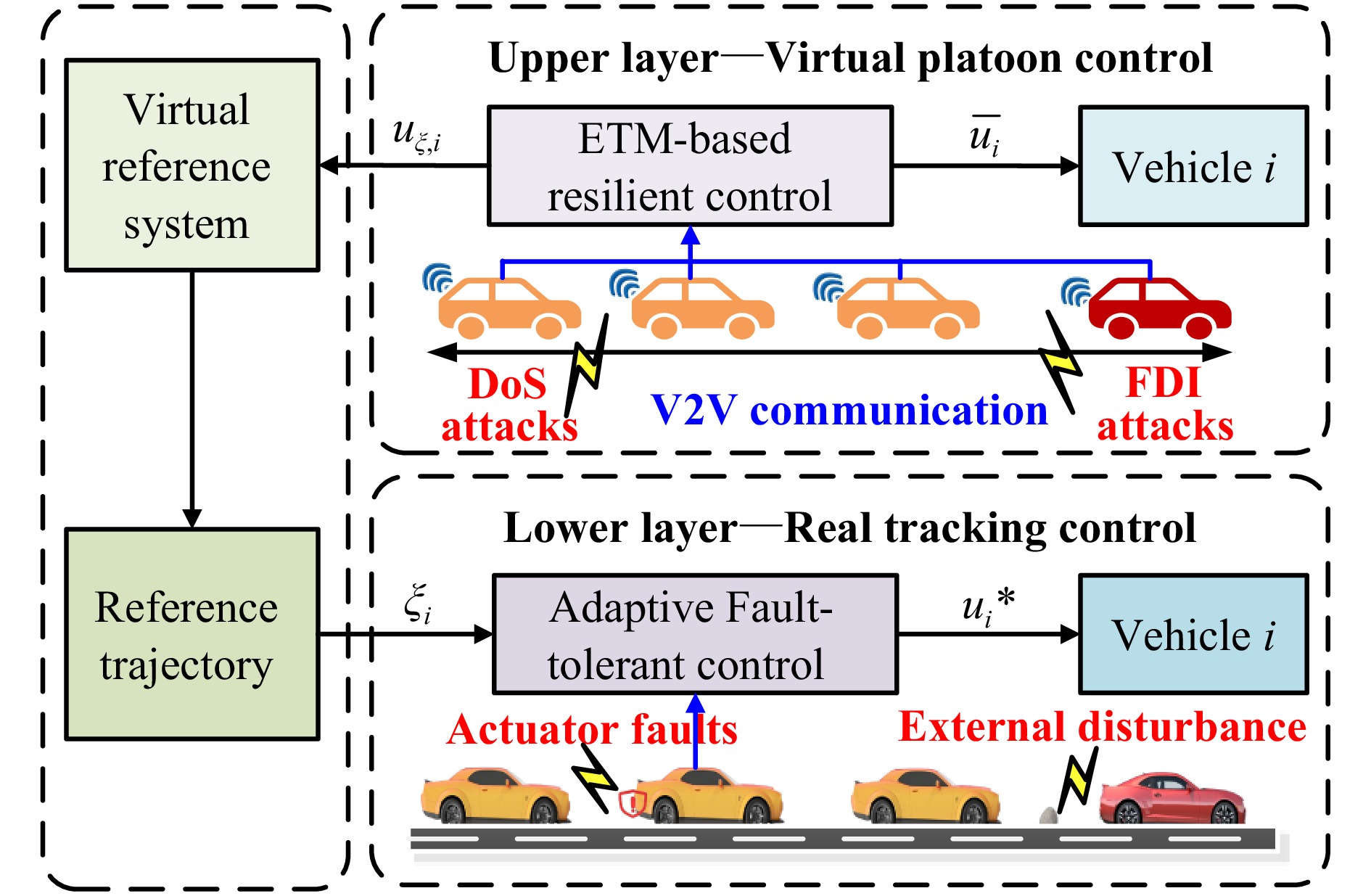
| Citation: | J. Gong, L. Ding, C. Jia, Y. Liu, and J. Cao, “Toward resilient vehicle platooning: A two-layer secure control architecture against hybrid cyber-physical threats,” IEEE/CAA J. Autom. Sinica, early access, 2026. doi: 10.1109/JAS.2026.125909

|

| [1] |
X. Ge, Q.-L. Han, X.-M. Zhang, and D. Ding, “Communication resource-efficient vehicle platooning control with various spacing policies,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 362–376, Feb. 2024. doi: 10.1109/jas.2023.123507
|
| [2] |
Y. Bian, C. Du, M. Hu, S. E. Li, H. Liu, and C. Li, “Fuel economy optimization for platooning vehicle swarms via distributed economic model predictive control,” IEEE Trans. Autom. Sci. Eng., vol. 19, no. 4, pp. 2711–2723, Oct. 2022. doi: 10.1109/TASE.2021.3128920
|
| [3] |
F. Tedesco and A. Casavola, “Distributed supervision strategies for cyber-physical systems with varying network topology,” IEEE Trans. Autom. Control, vol. 69, no. 8, pp. 5408–5423, Aug. 2024. doi: 10.1109/TAC.2024.3362884
|
| [4] |
Z. Lian, P. Shi, and M. Chen, “A survey on cyber-attacks for cyber-physical systems: Modeling, defense and design,” IEEE Internet Things J., vol. 12, no. 2, pp. 1471–1483, Jan. 2025. doi: 10.1109/JIOT.2024.3495046
|
| [5] |
R. A. Biroon, Z. A. Biron, and P. Pisu, “False data injection attack in a platoon of CACC: Real-time detection and isolation with a pde approach,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 7, pp. 8692–8703, Jul. 2022. doi: 10.1109/TITS.2021.3085196
|
| [6] |
N. Ahmed, A. Ameli, and H. Naser, “Detection, identification, and mitigation of false data injection attacks in vehicle platooning,” IEEE Trans. Veh. Technol., vol. 74, no. 1, pp. 1296–1309, Jan. 2025. doi: 10.1109/tvt.2024.3456080
|
| [7] |
H. Wei, Y. Zhang, B.-B. Hu, C. Lv, and Y. Shi, “Human-assisted resilient coordination for automated platoon with false data injection attack,” IEEE Trans. Veh. Technol., vol. 73, no. 12, pp. 19389–19399, Dec. 2024. doi: 10.1109/TVT.2024.3439569
|
| [8] |
P. Zhu, S. Jin, X. Bu, and Z. Hou, “Distributed data-driven control for a connected autonomous vehicle platoon subjected to false data injection attacks,” IEEE Trans. Autom. Sci. Eng., vol. 21, no. 4, pp. 7527–7538, Oct. 2024. doi: 10.1109/TASE.2023.3345369
|
| [9] |
C. Zhao, R. Ma, M. Wang, J. Xu, and L. Cai, “Safeguard vehicle platooning based on resilient control against false data injection attacks,” IEEE Trans. Intell. Transp. Syst., vol. 25, no. 11, pp. 17023–17037, Nov. 2024. doi: 10.1109/TITS.2024.3424687
|
| [10] |
J. An, L. Cao, Y. Wang, A. K. Jadoon, and S. Wang, “Adaptive fault-tolerant optimized platoon cloud tracking control for heterogeneous vehicles via dual learning mechanism,” IEEE Trans. Autom. Sci. Eng., vol. 22, pp. 4382–4393, 2025. doi: 10.1109/TASE.2024.3410642
|
| [11] |
J. Gong, C. Murguia, A. Bayuwindra, and J. Cao, “Resilient controller synthesis against dos attacks for vehicular platooning in spatial domain,” IEEE Trans. Veh. Technol., vol. 74, no. 5, pp. 8251–8266, May 2025. doi: 10.1109/TVT.2025.3530963
|
| [12] |
Z. A. Biron, S. Dey, and P. Pisu, “Real-time detection and estimation of denial of service attack in connected vehicle systems,” IEEE Trans. Intell. Transp. Syst., vol. 19, no. 12, pp. 3893–3902, 2018. doi: 10.1109/TITS.2018.2791484
|
| [13] |
N. Zhao, X. Zhao, M. Chen, G. Zong, and H. Zhang, “Resilient distributed event-triggered platooning control of connected vehicles under denial-of-service attacks,” IEEE Trans. Intell. Transp. Syst., vol. 24, no. 6, pp. 6191–6202, 2023. doi: 10.1109/TITS.2023.3250402
|
| [14] |
Z. Guo, S. Fan, Y. Fu, D. Zhang, L. Dong, and C. Deng, “Finite-time vehicle platoon control for cpvs under dos attacks,” IEEE Trans. Intell. Transp. Syst., vol. 26, no. 7, pp. 10736–10746, Jul. 2025. doi: 10.1109/TITS.2025.3548667
|
| [15] |
C. Liu, Z. Xia, and R. J. Patton, “Distributed fault-tolerant consensus control of vehicle platoon systems with dos attacks,” IEEE Trans. Veh. Technol., vol. 73, no. 10, pp. 14438–14449, 2024. doi: 10.1109/TVT.2024.3406608
|
| [16] |
M. Hussein, Y. Zhang, and Z. Liu, “Distributed fault-tolerant formation control design via high-order sliding mode for a team of car-like vehicles,” IEEE Trans. Intell. Veh., vol. 9, no. 2, pp. 4221–4231, Feb. 2024. doi: 10.1109/TIV.2023.3340549
|
| [17] |
X. Yang, V. Puig, X. Wang, S. Wang, C. Sun, and Y. Zhang, “Dynamic-high-gain-based decentralized optimal fault-tolerant control for a class of interconnected nonlinear systems,” IEEE Trans. Autom. Control, vol. 70, no. 9, pp. 5823-5835, Sep. 2025. doi: 10.1109/TAC.2025.3546545
|
| [18] |
J. Han, J. Zhang, C. He, C. Lv, C. Li, Y. Ji, and X. Hou, “Prescribed-time performance recovery fault tolerant control of platoon with nominal constraints guarantee,” IEEE Trans. Intell. Transp. Syst., vol. 24, no. 3, pp. 3501–3513, 2023. doi: 10.1109/TITS.2022.3232818
|
| [19] |
X.-G. Guo, W.-D. Xu, J.-L. Wang, J. H. Park, and H. Yan, “Blf-based neuroadaptive fault-tolerant control for nonlinear vehicular platoon with time-varying fault directions and distance restrictions,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 8, pp. 12388–12398, Aug. 2022. doi: 10.1109/tits.2021.3113928
|
| [20] |
P. Zhu, S. Jin, X. Bu, and Z. Hou, “Distributed data-driven event-triggered fault-tolerant control for a connected heterogeneous vehicle platoon with sensor faults,” IEEE Trans. Intell. Transp. Syst., vol. 25, no. 6, pp. 5498–5509, Jun. 2024. doi: 10.1109/TITS.2023.3335227
|
| [21] |
X. Wang, J. H. Park, H. Liu, and X. Zhang, “Adaptive fault-tolerant platooning control for nonlinear homogeneous multiple autonomous vehicles under unreliable communication networks,” Int. J. Robust Nonlinear Control, vol. 34, no. 8, pp. 5270–5288, 2024. doi: 10.1002/rnc.7262
|
| [22] |
K. Yang, D. Liu, S. Baldi, W. Yu, and C. Lv, “Decoupling-based resilient control of vehicular platoons under injection of false wireless data,” IEEE Trans. Intell. Transp. Syst., vol. 25, no. 12, pp. 21 500–21 514, 2024. doi: 10.1109/TITS.2024.3466232
|
| [23] |
C. Liu, J. Zhao, and R. J. Patton, “Distributed antittack fault-tolerant tracking control for vehicle platoon systems under cyber-physical threats,” IEEE Trans. Ind. Inform., vol. 19, no. 6, pp. 7825–7834, Jun. 2023. doi: 10.1109/TII.2022.3171343
|
| [24] |
Z. Gao, X. Li, Z. Wei, G. Guo, S. Wen, Y. Zhao, and S. Mumtaz, “Fixed-time secure control for vehicular platoons under deception attacks on both sensor and actuator via adaptive fixed-time disturbance observer,” IEEE Internet Things J., vol. 12, no. 11, pp. 15828–15839, 2025. doi: 10.1109/JIOT.2025.3529845
|
| [25] |
J. Gong, Y. Zhao, J. Cao, J. Guo, M. Abdel-Aty, and W. Huang, “A virtual spring strategy for cooperative control of connected and automated vehicles at signal-free intersections,” IEEE Trans. Intell. Transp. Syst., vol. 25, no. 2, pp. 1430–1444, 2024. doi: 10.1109/TITS.2023.3316273
|
| [26] |
J. Gong, Y. Zhao, J. Cao, W. Huang, W. Chen, and M. Abdel-Aty, “Resilient automated intersection control of connected vehicles under denial of service attacks,” Eng. Appl. Artif. Intell., vol. 136, p. 108950, 2024. doi: 10.1016/j.engappai.2024.108950
|
| [27] |
J. Cao, D. Ding, J. Liu, E. Tian, S. Hu, and X. Xie, “Hybrid-triggered-based security controller design for networked control system under multiple cyber attacks,” Inf. Sci., vol. 548, pp. 69–84, 2021. doi: 10.1016/j.ins.2020.09.046
|
| [28] |
J. Liu, Y. Gu, X. Xie, D. Yue, and J. H. Park, “Hybrid-driven-based $\cal{H}_\infty $ control for networked cascade control systems with actuator saturations and stochastic cyber attacks,” IEEE Trans. Syst., Man, Cybern.: Syst., vol. 49, no. 12, pp. 2452–2463, Dec. 2019. doi: 10.1109/tsmc.2018.2875484
|
| [29] |
H. Guo, J. Sun, and Z.-H. Pang, “Residual-based false data injection attacks against multi-sensor estimation systems,” IEEE/CAA J. Autom. Sin., vol. 10, no. 5, pp. 1181–1191, May 2023. doi: 10.1109/JAS.2023.123441
|
| [30] |
Y. Tang, D. Zhang, P. Shi, W. Zhang, and F. Qian, “Event-based formation control for nonlinear multiagent systems under dos attacks,” IEEE Trans. Autom. Control, vol. 66, no. 1, pp. 452–459, Jan. 2021. doi: 10.1109/TAC.2020.2979936
|
| [31] |
J. Liu and J. Dong, “Privacy-preserving cruise control for heterogeneous platoon vehicle system under actuator faults and uncertainties,” IEEE Trans. Intell. Transp. Syst., vol. 25, no. 10, pp. 15029–15039, Oct. 2024. doi: 10.1109/TITS.2024.3390779
|
| [32] |
J.-B. Pomet, L. Praly, et al, “Adaptive nonlinear regulation: Estimation from the Lyapunov equation,” IEEE Trans. Autom. Control, vol. 37, no. 6, pp. 729–740, Jun. 1992. doi: 10.1109/9.256328
|
| [33] |
S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear matrix inequalities in system and control theory. Philadelphia, PA: SIAM, 1994.
|
| [34] |
X.-J. Li and G.-H. Yang, “Robust adaptive fault-tolerant control for uncertain linear systems with actuator failures,” IET Control Theory Appl., vol. 6, no. 10, pp. 1544–1551, 2012. doi: 10.1049/iet-cta.2011.0599
|
Figures(13) / Tables(1)






 DownLoad:
DownLoad: