A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
| Citation: | S. Gao, X. Luan, B. Huang, S. Zhao, and F. Liu, “State estimation with model uncertainty using structure variational bayesian and transfer learning,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 3, pp. 1–13, Mar. 2026. doi: 10.1109/JAS.2025.125825

|

| [1] |
E. Mazor, A. Averbuch, Y. Bar-Shalom, and J. Dayan, “Interacting multiple model methods in target tracking: A survey,” IEEE Trans. Aerospace and Electronic Systems, vol. 34, no. 1, pp. 103–123, 1998. doi: 10.1109/7.640267
|
| [2] |
C. J. Kim, “Dynamic linear models with Markov-switching,” J. Econometrics, vol. 60, no. 1–2, pp. 1–22, 1994. doi: 10.1016/0304-4076(94)90036-1
|
| [3] |
A. Logothetis and V. Krishnamurthy, “Expectation maximization algorithms for map estimation of jump markov linear systems,” IEEE Trans. Signal Processing, vol. 47, no. 8, pp. 2139–2156, 1999. doi: 10.1109/78.774753
|
| [4] |
Y. Zhang, K. Lou, and Y. Ge, “New result on delay-dependent stability for Markovian jump time-delay systems with partial information on transition probabilities,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 6, pp. 1499–1505, 2016.
|
| [5] |
X. R. Li and V. Jilkov, “Survey of maneuvering target tracking,” IEEE Trans. Aerospace and Electronic Systems, vol. 41, no. 4, pp. 1255–1321, 2005. doi: 10.1109/TAES.2005.1561886
|
| [6] |
H. A. Blom, “An efficient filter for abruptly changing systems,” in Proc. 23rd IEEE Conf. Decision and Control, 1984, pp. 656–658.
|
| [7] |
H. A. Blom and Y. Bar-Shalom, “The interacting multiple model algorithm for systems with markovian switching coefficients,” IEEE Trans. Autom. Control, vol. 33, no. 8, pp. 780–783, 1988. doi: 10.1109/9.1299
|
| [8] |
X. Kong, X. Zhang, X. Zhang, C. Wang, H.-D. Chiang, and P. Li, “Adaptive dynamic state estimation of distribution network based on interacting multiple model,” IEEE Trans. Sustainable Energy, vol. 13, no. 2, pp. 643–652, 2021.
|
| [9] |
L. A. Johnston and V. Krishnamurthy, “An improvement to the interacting multiple model (IMM) algorithm,” IEEE Trans. Signal Processing, vol. 49, no. 12, pp. 2909–2923, 2001. doi: 10.1109/78.969500
|
| [10] |
O. L. Costa and S. Guerra, “Stationary filter for linear minimum mean square error estimator of discrete-time Markovian jump systems,” IEEE Trans. Autom. Control, vol. 47, no. 8, pp. 1351–1356, 2002. doi: 10.1109/TAC.2002.800745
|
| [11] |
F. Zhao, C. Chen, W. He, and S. S. Ge, “A filtering approach based on mmae for a SINS/CNS integrated navigation system,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 6, pp. 1113–1120, 2018. doi: 10.1109/JAS.2017.7510445
|
| [12] |
A. Doucet, N. J. Gordon, and V. Krishnamurthy, “Particle filters for state estimation of jump Markov linear systems,” IEEE Trans. Signal Processing, vol. 49, no. 3, pp. 613–624, 2001. doi: 10.1109/78.905890
|
| [13] |
S. Seifzadeh, B. Khaleghi, and F. Karray, “Distributed soft-data-constrained multi-model particle filter,” IEEE Trans. Cybern., vol. 45, no. 3, pp. 384–394, 2014.
|
| [14] |
X. R. Li and Y. Bar-Shalom, “Multiple-model estimation with variable structure,” IEEE Trans. Autom. Control, vol. 41, no. 4, pp. 478–493, 1996. doi: 10.1109/9.489270
|
| [15] |
Y. S. Shmaliy, F. Lehmann, S. Zhao, and C. K. Ahn, “Comparing robustness of the Kalman, H∞, and UFIR filters,” IEEE Trans. Signal Processing, vol. 66, no. 13, pp. 3447–3458, 2018. doi: 10.1109/TSP.2018.2833811
|
| [16] |
J. Wang, S. Ma, C. Zhang, and M. Fu, “Finite-time H∞ filtering for nonlinear singular systems with nonhomogeneous Markov jumps,” IEEE Trans. Cybern., vol. 49, no. 6, pp. 2133–2143, 2018.
|
| [17] |
N. M. Alyazidi and M. S. Mahmoud, “Distributed H2/H∞ filter design for discrete-time switched systems,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 158–168, 2019.
|
| [18] |
L. Zhang, “H∞ estimation for discrete-time piecewise homogeneous Markov jump linear systems,” Automatica, vol. 45, no. 11, pp. 2570–2576, 2009. doi: 10.1016/j.automatica.2009.07.004
|
| [19] |
H. Liu, D. W. Ho, and F. Sun, “Design of H∞ filter for Markov jumping linear systems with non-accessible mode information,” Automatica, vol. 44, no. 10, pp. 2655–2660, 2008. doi: 10.1016/j.automatica.2008.03.011
|
| [20] |
R. K. Boel, M. R. James, and I. R. Petersen, “Robustness and risk-sensitive filtering,” IEEE Trans. Autom. Control, vol. 47, no. 3, pp. 451–461, 2002. doi: 10.1109/9.989082
|
| [21] |
M. Zorzi and B. C. Levy, “On the convergence of a risk sensitive like filter,” in Proc. 54th IEEE Conf. Decision and Control, 2015, pp. 4990–4995.
|
| [22] |
B. C. Levy and R. Nikoukhah, “Robust least-squares estimation with a relative entropy constraint,” IEEE Trans. Infor. Theory, vol. 50, no. 1, pp. 89–104, 2004. doi: 10.1109/TIT.2003.821992
|
| [23] |
T. Başar, “Robust designs through risk sensitivity: An overview,” J. Systems Science and Complexity, vol. 34, no. 5, pp. 1634–1665, 2021. doi: 10.1007/s11424-021-1242-6
|
| [24] |
M. Zorzi, “Robust Kalman filtering under model perturbations,” IEEE Trans. Autom. Control, vol. 62, no. 6, pp. 2902–2907, 2016.
|
| [25] |
S. Gao, S. Zhao, X. Luan, and F. Liu, “Adaptive risk-sensitive filter for Markovian jump linear systems,” Automatica, vol. 151, p. 110897, 2023. doi: 10.1016/j.automatica.2023.110897
|
| [26] |
S. J. Pan and Q. Yang, “A survey on transfer learning,” IEEE Trans. Knowledge and Data Engineering, vol. 22, no. 10, pp. 1345–1359, 2009.
|
| [27] |
W. Zhang, L. Deng, L. Zhang, and D. Wu, “A survey on negative transfer,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 305–329, 2022.
|
| [28] |
F. Zhuang, Z. Qi, K. Duan, D. Xi, Y. Zhu, H. Zhu, H. Xiong, and Q. He, “A comprehensive survey on transfer learning,” Proc. IEEE, vol. 109, no. 1, pp. 43–76, 2020.
|
| [29] |
A. Karbalayghareh, X. Qian, and E. R. Dougherty, “Optimal Bayesian transfer learning,” IEEE Trans. Signal Processing, vol. 66, no. 14, pp. 3724–3739, 2018. doi: 10.1109/TSP.2018.2839583
|
| [30] |
A. Quinn, M. Kárnỳ, and T. V. Guy, “Fully probabilistic design of hierarchical bayesian models,” Infor. Sciences, vol. 369, pp. 532–547, 2016. doi: 10.1016/j.ins.2016.07.035
|
| [31] |
C. Foley and A. Quinn, “Fully probabilistic design for knowledge transfer in a pair of Kalman filters,” IEEE Signal Processing Letters, vol. 25, no. 4, pp. 487–490, 2017.
|
| [32] |
M. Papež and A. Quinn, “Robust bayesian transfer learning between kalman filters,” in Proc. IEEE 29th Int. Workshop on Machine Learning for Signal Processing, 2019, pp. 1–6.
|
| [33] |
M. Papež and A. Quinn, “Bayesian transfer learning between student-t filters,” Signal Processing, vol. 175, p. 107624, 2020. doi: 10.1016/j.sigpro.2020.107624
|
| [34] |
L. K. Pavelková, L. Jirsa, and A. Quinn, “Fully probabilistic design for knowledge fusion between bayesian filters under uniform disturbances,” Knowledge-Based Systems, vol. 238, p. 107879, 2022. doi: 10.1016/j.knosys.2021.107879
|
| [35] |
S. Gao, S. Zhao, X. Luan, and F. Liu, “Transfer state estimator for Markovian jump linear systems with multirate measurements,” IEEE Trans. Systems, Man, and Cybern.: Systems, vol. 53, no. 6, pp. 3440–3449, 2023. doi: 10.1109/TSMC.2022.3227534
|
| [36] |
S. Gao, X. Luan, B. Huang, S. Zhao, and F. Liu, “A transfer state estimator for uncertain parameters and noise statistics,” IFAC-PapersOnLine, vol. 58, no. 14, pp. 192–197, 2024. doi: 10.1016/j.ifacol.2024.08.335
|
| [37] |
Y. Bar-Shalom, X. R. Li, and T. Kirubarajan, Estimation With Applications to Tracking and Navigation: Theory Algorithms and Software. New York, USA: John Wiley & Sons, 2001.
|
| [38] |
S. Zhao, C. K. Ahn, P. Shi, Y. Shmaliy, and F. Liu, “Bayesian state estimation for Markovian jump systems: Employing recursive steps and pseudocodes,” IEEE Systems, Man, and Cybern. Magazine, vol. 5, no. 2, pp. 27–36, 2019. doi: 10.1109/MSMC.2018.2882145
|
| [39] |
R. Kulhavỳ, “Recursive nonlinear estimation: A geometric approach,” Automatica, vol. 26, no. 3, pp. 545–555, 1990. doi: 10.1016/0005-1098(90)90025-D
|
| [40] |
M. Toda and R. Patel, “Bounds on estimation errors of discrete-time filters under modeling uncertainty,” IEEE Trans. Autom. Control, vol. 25, no. 6, pp. 1115–1121, 1980. doi: 10.1109/TAC.1980.1102502
|
| [41] |
I. Hwang, C. E. Seah, and S. Lee, “A study on stability of the interacting multiple model algorithm,” IEEE Trans. Autom. Control, vol. 62, no. 2, pp. 901–906, 2016.
|
| [42] |
U. Orguner and M. Demirekler, “Risk-sensitive filtering for jump markov linear systems,” Automatica, vol. 44, no. 1, pp. 109–118, 2008. doi: 10.1016/j.automatica.2007.04.018
|
| [43] |
P. Takyi-Aninakwa, S. Wang, H. Zhang, X. Yang, and C. Fernandez, “An optimized long short-term memory-weighted fading extended kalman filtering model with wide temperature adaptation for the state of charge estimation of lithium-ion batteries,” Applied Energy, vol. 326, p. 120043, 2022. doi: 10.1016/j.apenergy.2022.120043
|
| [44] |
S. Yazdkhasti, D. Sabzevari, and J. Z. Sasiadek, “Adaptive h-infinity extended Kalman filtering for a navigation system in presence of high uncertainties,” Trans. Institute of Measurement and Control, vol. 45, no. 8, pp. 1430–1442, 2023. doi: 10.1177/01423312221136022
|
| [45] |
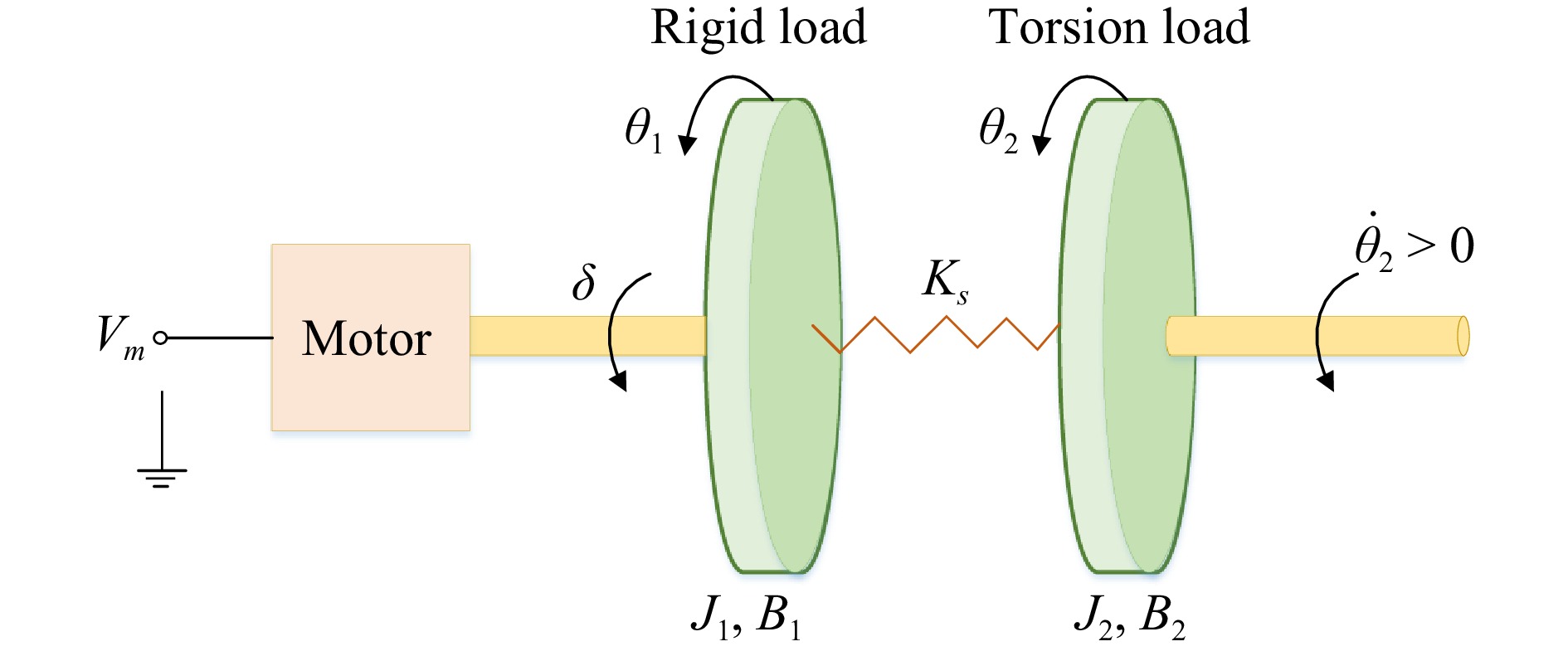
G. Fuchs, V. Šátek, V. Vopěnka, J. Kunovskỳ, and M. Kozek, “Application of the modern taylor series method to a multi-torsion chain,” Simulation Modelling Practice and Theory, vol. 33, pp. 89–101, 2013. doi: 10.1016/j.simpat.2012.10.002
|
Figures(16) / Tables(1)






 DownLoad:
DownLoad: