A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
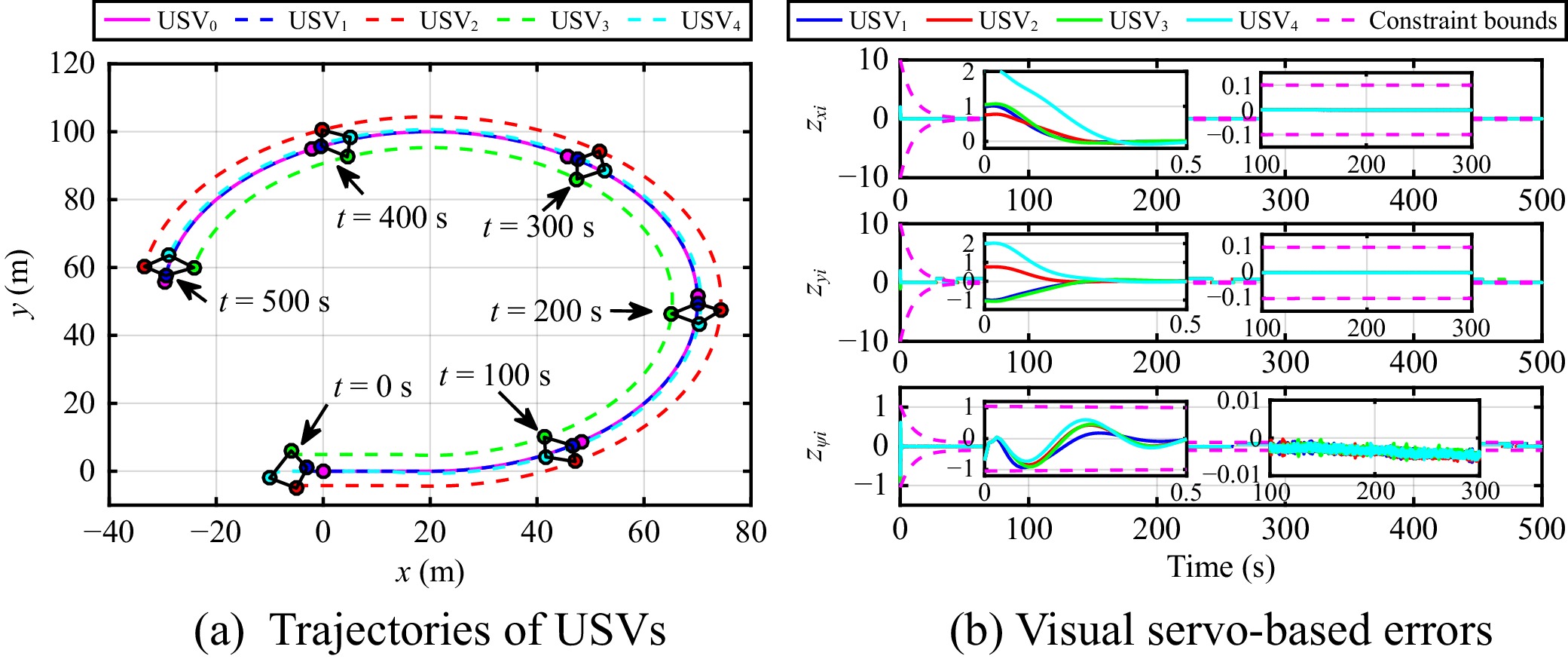
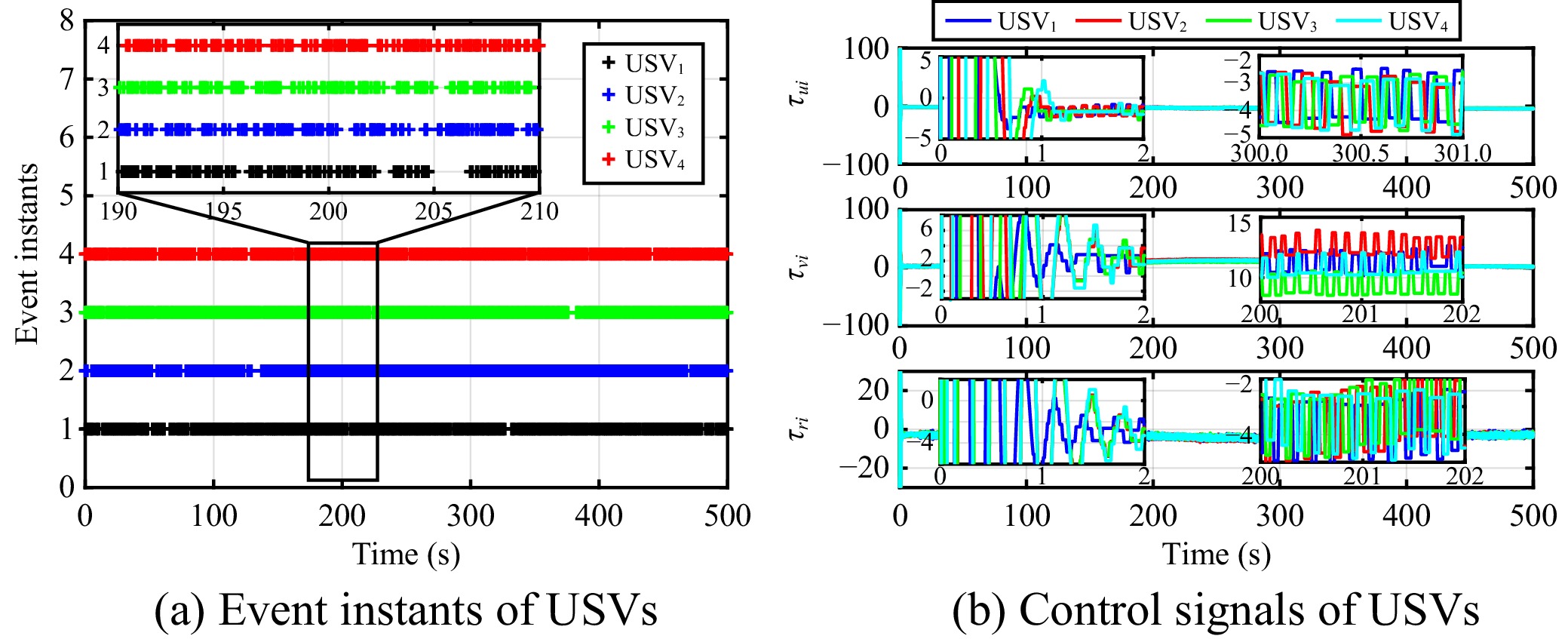
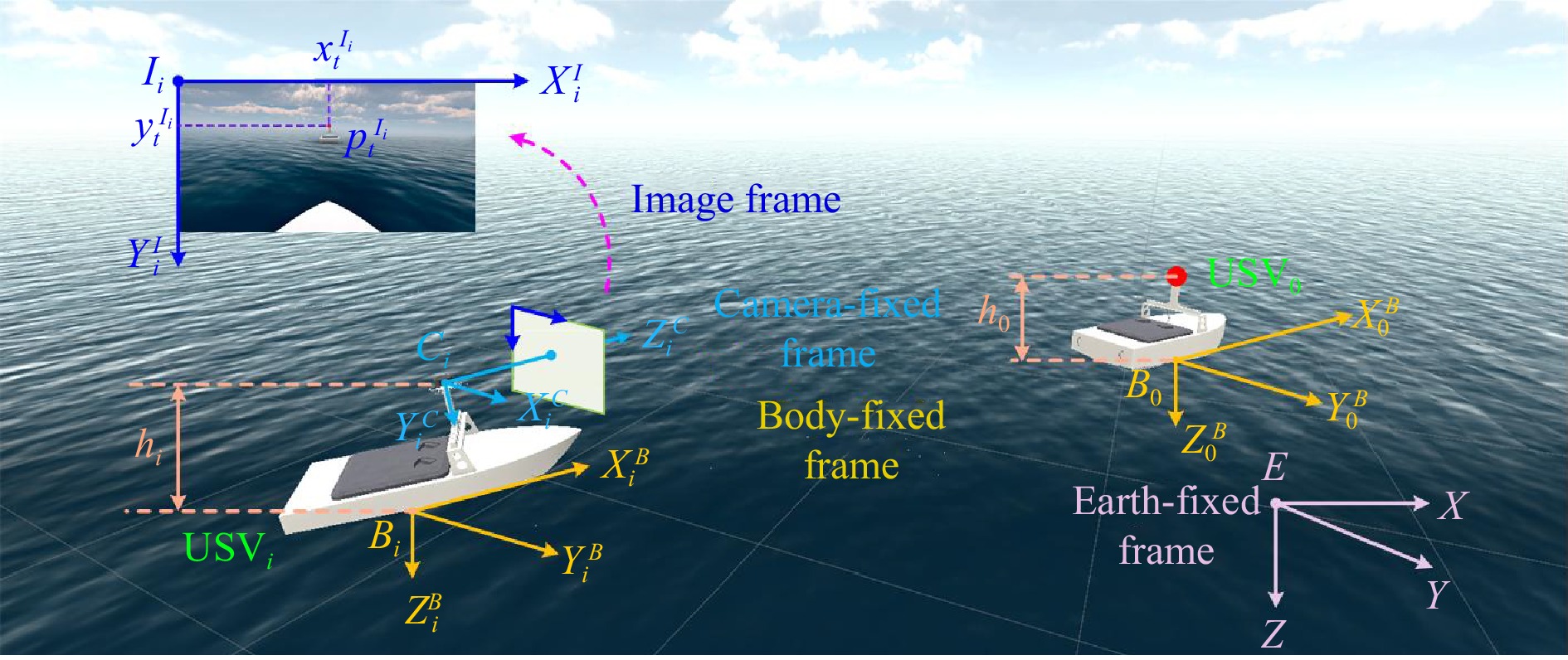
| Citation: | X. Liu, Y. Wang, X. Zhao, and Z. Feng, “Visual servo-based formation control of unmanned surface vehicles,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 2, pp. 480–482, Feb. 2026. doi: 10.1109/JAS.2025.125687

|

| [1] |
H. Liang, H. Li, J. Gao, R. Cui, and D. Xu, “Economic MPC-based planning for marine vehicles: Tuning safety and energy efficiency,” IEEE Trans. Ind. Electron., vol. 70, no. 10, pp. 10546–10556, 2023. doi: 10.1109/TIE.2022.3220876
|
| [2] |
L. Ma, Y. Wang, and Q.-L. Han, “Cooperative target tracking of multiple autonomous surface vehicles under switching interaction topologies,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 673–684, 2023. doi: 10.1109/JAS.2022.105509
|
| [3] |
N. Wang, H. He, Y. Hou, and B. Han, “Model-free visual servo swarming of manned-unmanned surface vehicles with visibility maintenance and collision avoidance,” IEEE Trans. Intell. Transp. Syst., vol. 25, no. 1, pp. 697–709, 2024. doi: 10.1109/TITS.2023.3310430
|
| [4] |
Q. Yang and H. Li, “RMPC-based visual servoing for trajectory tracking of quadrotor UAVs with visibility constraints,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 9, pp. 2027–2029, 2024. doi: 10.1109/JAS.2024.124533
|
| [5] |
Z. Feng and S. Yao, “Dynamic event-triggered active disturbance rejection formation control for constrained underactuated AUVs,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 2, pp. 460–462, 2025. doi: 10.1109/JAS.2024.124617
|
| [6] |
X. Yao, H. Sun, Z. Zhao, and Y. Liu, “Event-triggered bipartite consensus tracking and vibration control of flexible Timoshenko manipulators under time-varying actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 5, pp. 1190–1201, 2024. doi: 10.1109/JAS.2024.124266
|
| [7] |
K. Yu, Y. Li, M. Lv, and S. Tong, “Adaptive fuzzy formation control for underactuated multi-USVs with dynamic event-triggered communication,” IEEE Trans. Syst. Man Cybern. Syst., vol. 54, no. 12, pp. 7783–7793, 2024. doi: 10.1109/TSMC.2024.3460369
|
| [8] |
Y. Zhang, K. Pang, C. K. Ahn, Y. Li, and C. Hua, “Adaptive visual servoing control of closed-architecture robots with both visibility constraints and tracking error constraints,” IEEE/ASME Trans. Mechatron., vol. 30, no. 6, pp. 4483–4492, 2025. doi: 10.1109/TMECH.2024.3499324
|
| [9] |
B. Guo and Z. Zhao, “Weak convergence of nonlinear high-gain tracking differentiator,” IEEE Trans. Autom. Control, vol. 58, no. 4, pp. 1074–1080, 2013. doi: 10.1109/TAC.2012.2218153
|
| [10] |
X. Liu, H. Yan, W. Zhou, N. Wang, and Y. Wang, “Event-triggered optimal tracking control for underactuated surface vessels via neural reinforcement learning,” IEEE Trans. Ind. Inf., vol. 20, no. 11, pp. 12837–12847, 2024. doi: 10.1109/TII.2024.3424573
|
Figures(3)






 DownLoad:
DownLoad: