A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
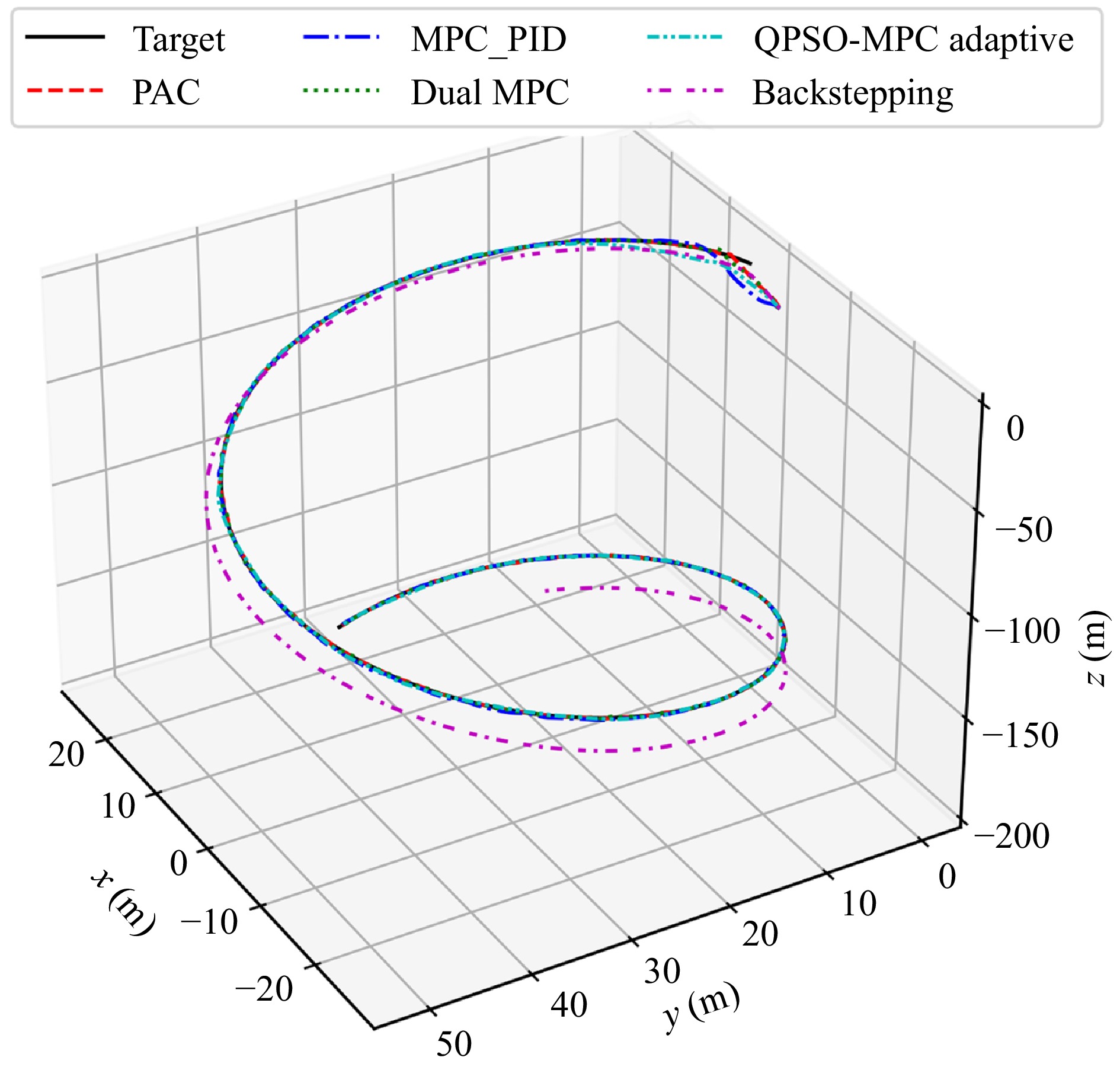
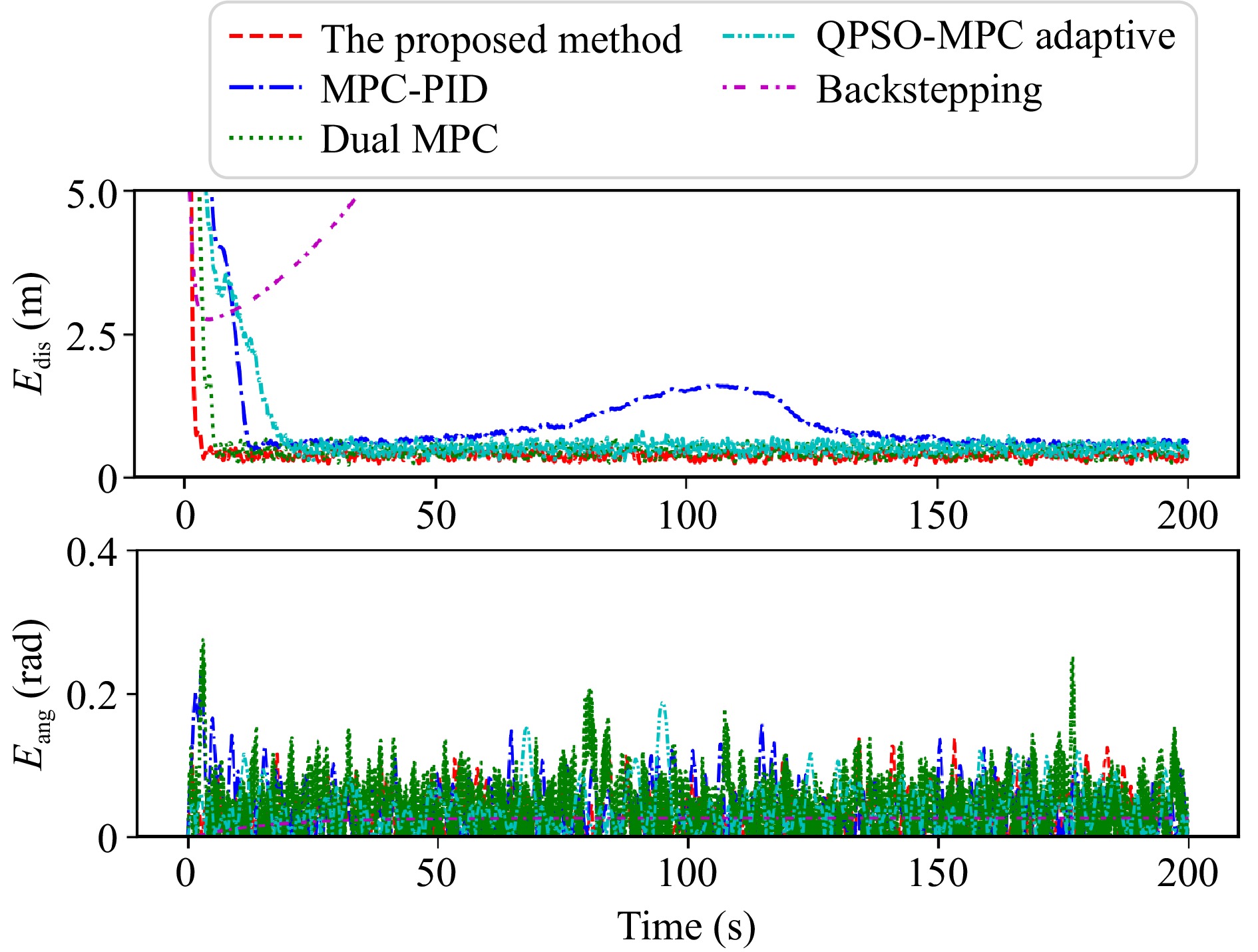
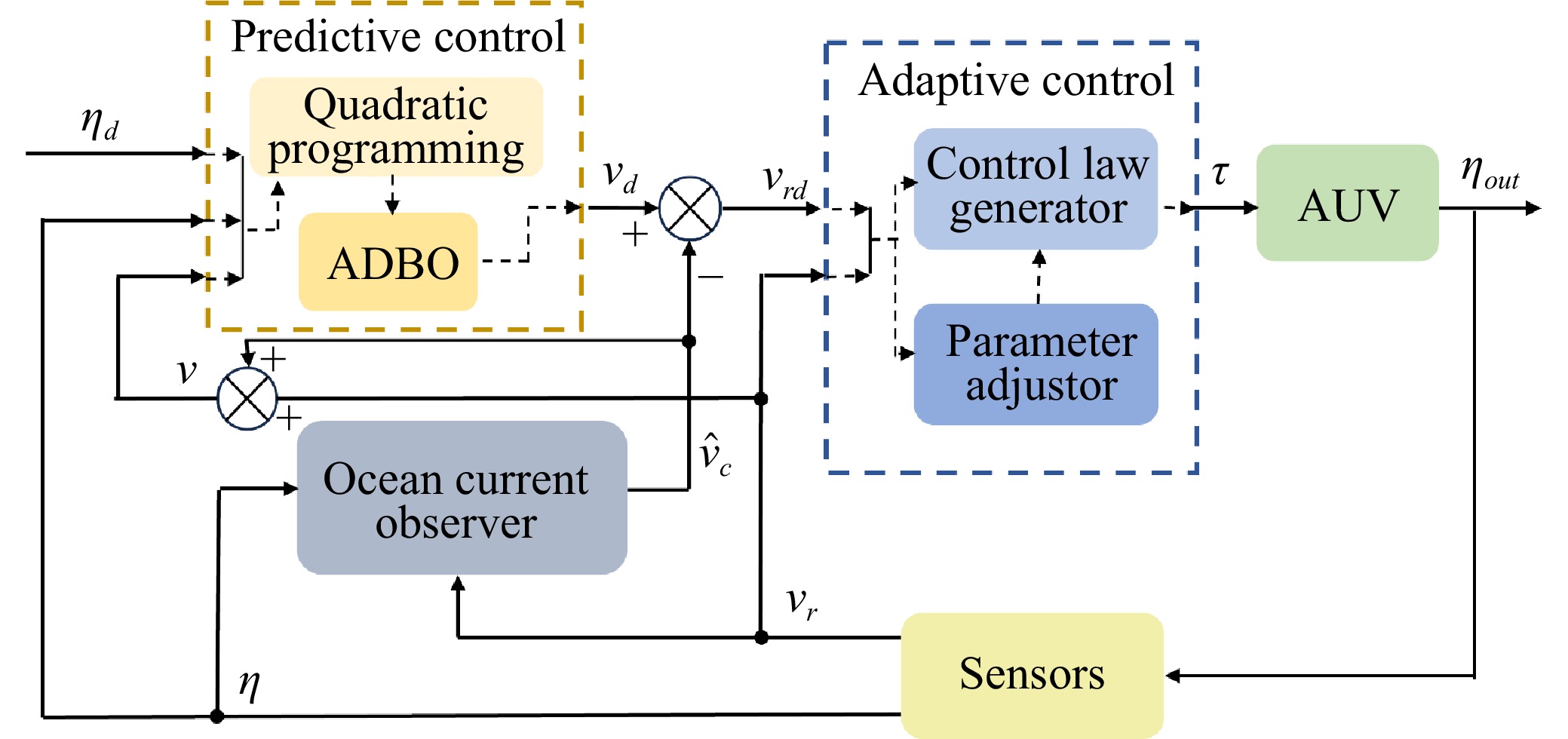
| Citation: | D. Ji, X. Wang, and Y. Liu, “Relative motion based predictive adaptive control: A case study of AUV 3D trajectory tracking,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 2, pp. 1–3, Feb. 2026. doi: 10.1109/JAS.2025.125624

|

| [1] |
A. Sahoo, S. K. Dwivedy, and P. S. Robi, “Advancements in the field of autonomous underwater vehicle,” Ocean Eng., vol. 181, pp. 145–160, Jun. 2019. doi: 10.1016/j.oceaneng.2019.04.011
|
| [2] |
Y. Fang, Z. Huang, J. Pu, and J. Zhang, “AUV position tracking and trajectory control based on fast-deployed deep reinforcement learning method,” Ocean Eng., vol. 245, p. 110452, Feb. 2022. doi: 10.1016/j.oceaneng.2021.110452
|
| [3] |
X. Liu, M. Zhang, and E. Rogers, “Trajectory tracking control for autonomous underwater vehicles based on fuzzy re-planning of a local desired trajectory,” IEEE Trans. Vehicular Technology, vol. 68, no. 12, pp. 11657–11667, Dec. 2019. doi: 10.1109/TVT.2019.2948153
|
| [4] |
P. S. Londhe and B. M. Patre, “Adaptive fuzzy sliding mode control for robust trajectory tracking control of an autonomous underwater vehicle,” Intel. Serv. Robotics, vol. 12, no. 1, pp. 87–102, Jan. 2019. doi: 10.1007/s11370-018-0263-z
|
| [5] |
L. Tang, F. Yan, B. Zou, K. Wang, and C. Lv, “An improved kinematic model predictive control for high-speed path tracking of autonomous vehicles,” IEEE Access, vol. 8, pp. 51400–51413, 2020. doi: 10.1109/ACCESS.2020.2980188
|
| [6] |
Z. Yan, P. Gong, W. Zhang, and W. Wu, “Model predictive control of autonomous underwater vehicles for trajectory tracking with external disturbances,” Ocean Eng., vol. 217, p. 107884, 2020. doi: 10.1016/j.oceaneng.2020.107884
|
| [7] |
W. Gan, D. Zhu, Z. Hu, X. Shi, L. Yang, and Y. Chen, “Model predictive adaptive constraint tracking control for underwater vehicles,” IEEE Trans. Ind. Electron., vol. 67, no. 9, pp. 7829–7840, Sept. 2020. doi: 10.1109/TIE.2019.2941132
|
| [8] |
T. I. Fossen, Marine control systems: guidance, navigation and control of ships, rigs and underwater vehicles. Trondheim, Norway: Marine Cybernetics, 2002.
|
| [9] |
J. Xue and B. Shen, “Dung beetle optimizer: a new meta-heuristic algorithm for global optimization,” J Supercomput, vol. 79, no. 7, pp. 7305–7336, May 2023. doi: 10.1007/s11227-022-04959-6
|
| [10] |
F. Alonge, F. D’Ippolito, and F. M. Raimondi, “Trajectory tracking of underactuated underwater vehicles,” in Proc. the 40th IEEE Conf. on Decision and Control, Orlando, FL, USA, 2001, pp. 4421−4426.
|
Figures(3) / Tables(1)






 DownLoad:
DownLoad: