A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
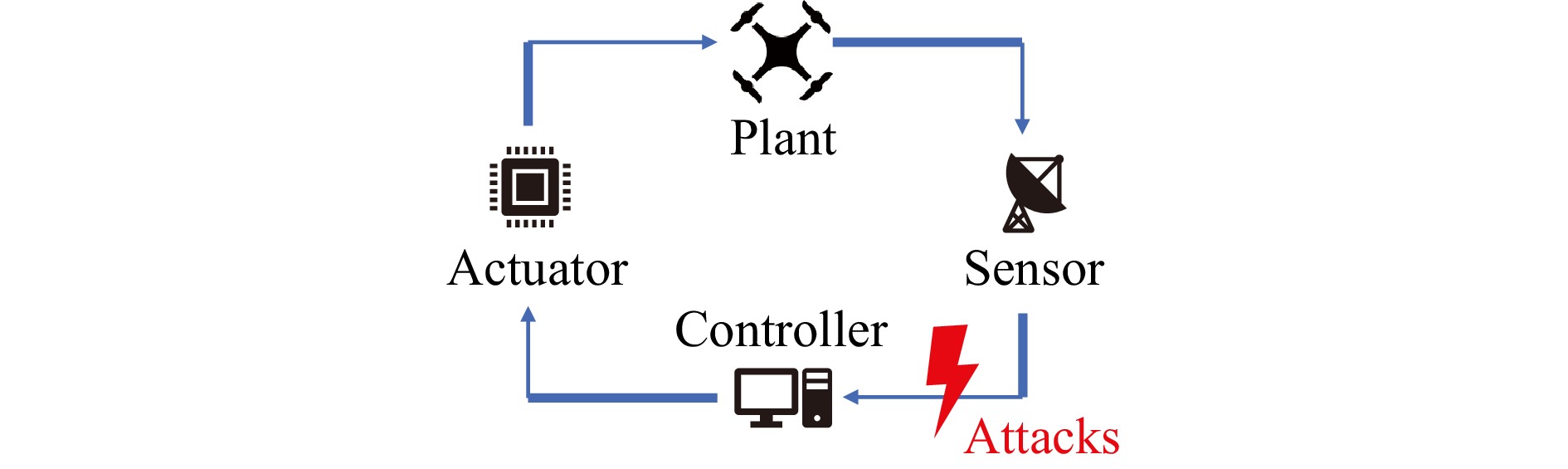
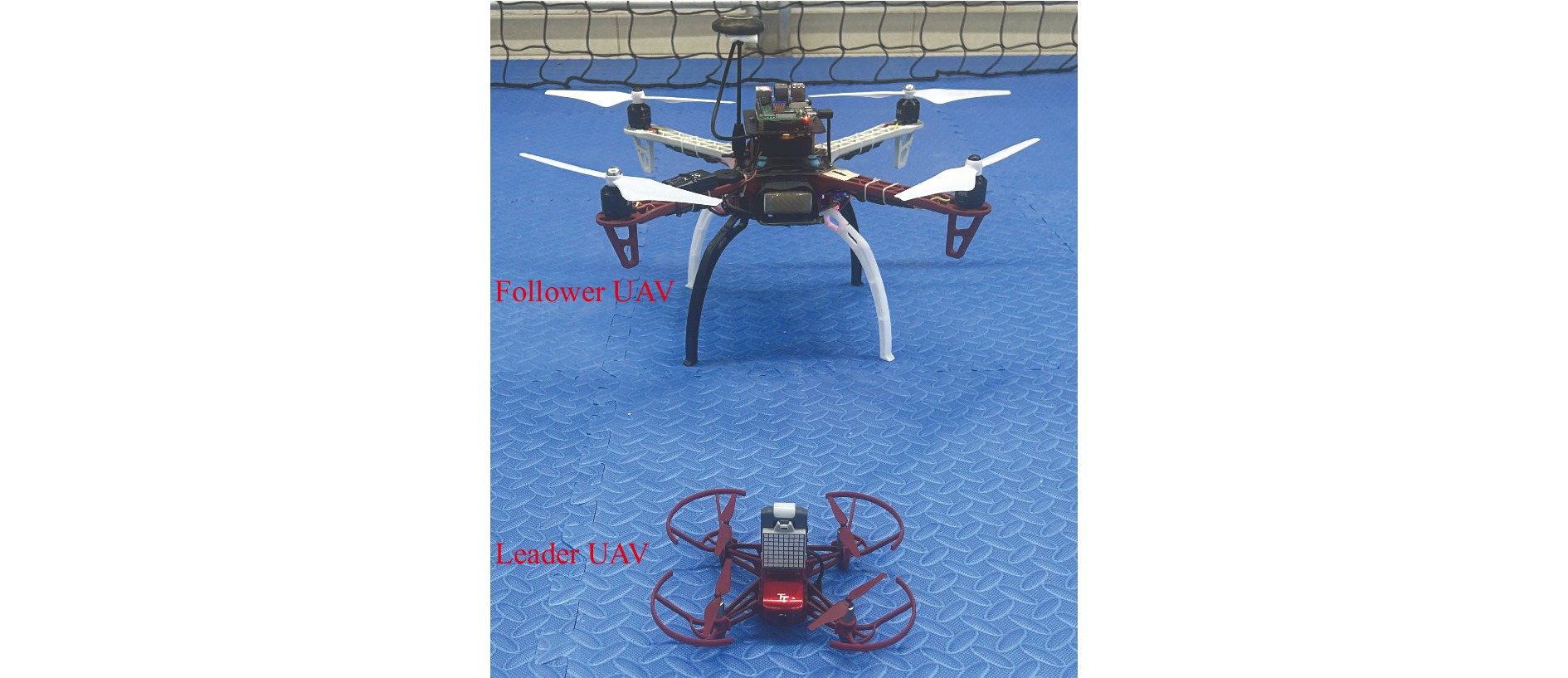
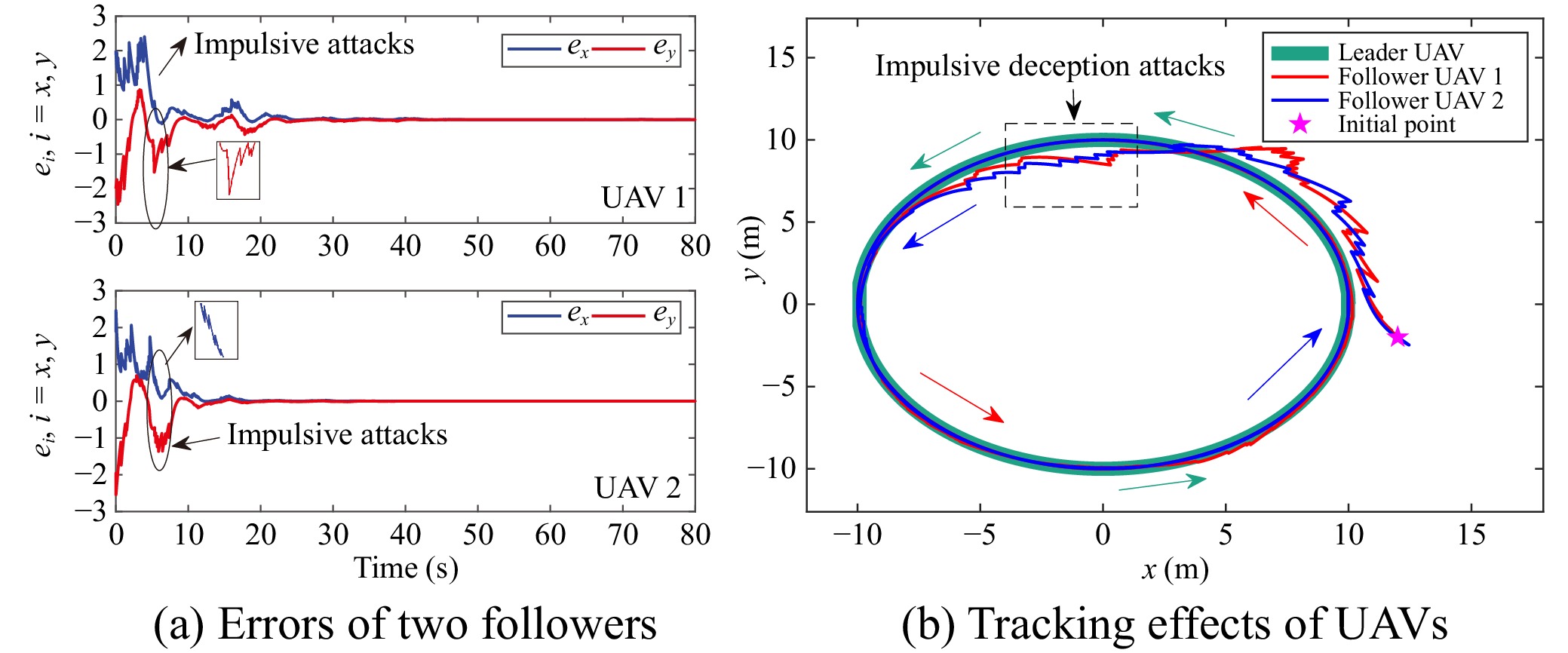
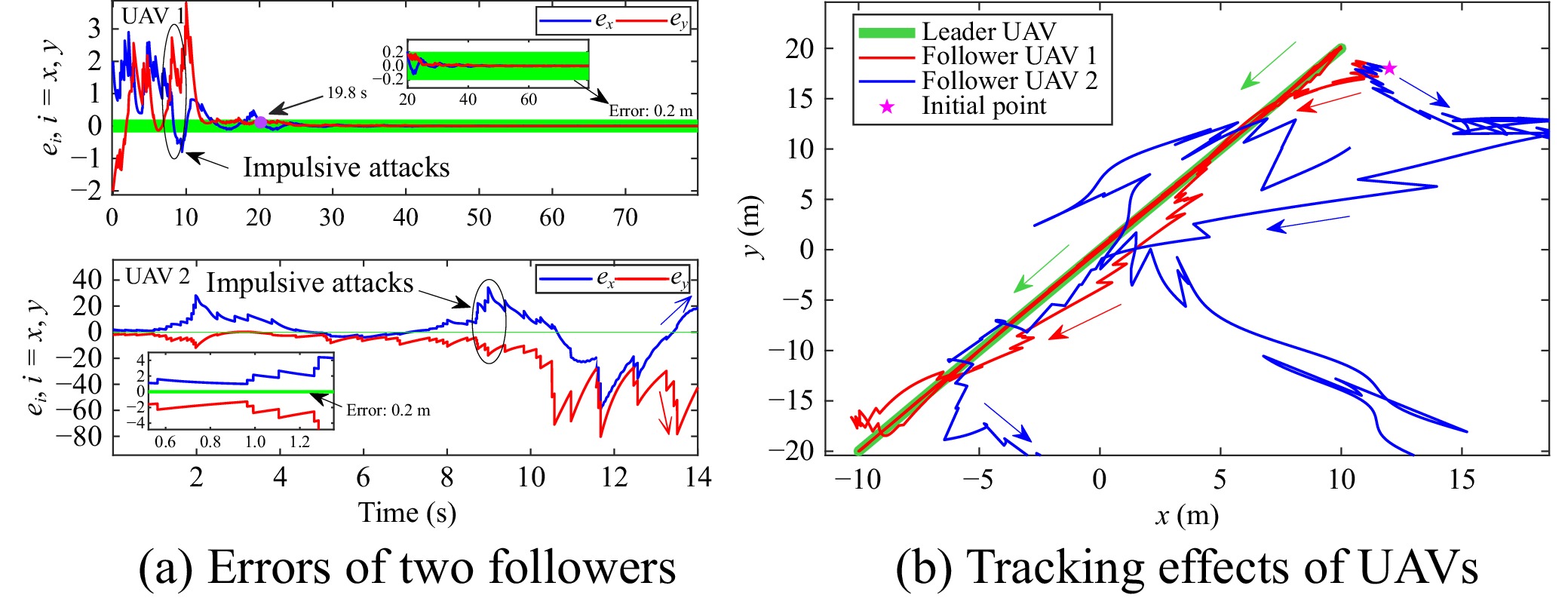
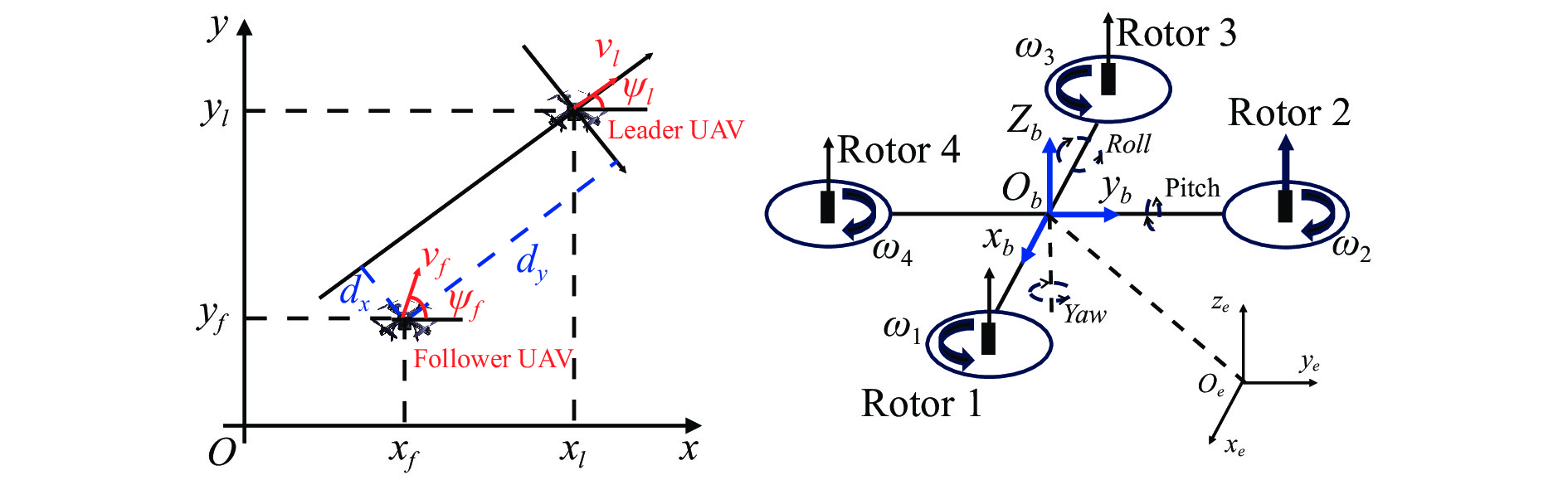
| Citation: | W. Song, C. Liu, X. Han, and X. Li, “Leader-follower formation control of quadrotor UAVs with stochastic impulsive deception attacks,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 2, pp. 1–3, Feb. 2026. doi: 10.1109/JAS.2025.125615

|

| [1] |
Z. Zuo, C. Liu, Q.-L. Han, and J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, 2022. doi: 10.1109/JAS.2022.105410
|
| [2] |
Q. Yang and H. Li, “RMPC-based visual servoing for trajectory tracking of quadrotor UAVs with visibility constraints,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 9, pp. 2027–2029, 2024. doi: 10.1109/JAS.2024.124533
|
| [3] |
M. Syed Ali and P. Balasubramaniam, “Robust stability of uncertain fuzzy Cohen-Grossberg BAM neural networks with time-varying delays,” Expert Syst. Appl., vol. 36, no. 7, pp. 10583–10588, 2009. doi: 10.1016/j.eswa.2009.02.058
|
| [4] |
Z. Du, X. Xie, Z. Qu, Y. Hu, and V. Stojanovic, “Dynamic event-triggered consensus control for interval type-2 fuzzy multi-agent systems,” IEEE Trans. Circuits Syst. I, Reg. Papers, vol. 71, no. 8, pp. 3857–3866, 2024. doi: 10.1109/TCSI.2024.3371492
|
| [5] |
X. Song, C. Wu, S. Song, V. Stojanovic, and I. Tejado, “Fuzzy wavelet neural adaptive finite-time self-triggered fault-tolerant control for a quadrotor unmanned aerial vehicle with scheduled performance,” Eng. Appl. Artif. Intell., vol. 131, p. 107832, 2024. doi: 10.1016/j.engappai.2023.107832
|
| [6] |
G. Narayanan, M. S. Ali, Q. Zhu, B. Priya, and G. K. Thakur, “Fuzzy observer-based consensus tracking control for fractional-order multi-agent systems under cyber-attacks and its application to electronic circuits,” IEEE Trans. Netw. Sci. Eng., vol. 10, no. 2, pp. 698–708, 2023. doi: 10.1109/TNSE.2022.3217618
|
| [7] |
P. Kumar Ranjan, A. Sinha, Y. Cao, D. Casbeer, and I. Weintraub, “Relational maneuvering of leader-follower unmanned aerial vehicles for flexible formation,” IEEE Trans. Cybern., vol. 54, no. 10, pp. 5598–5609, 2024. doi: 10.1109/TCYB.2024.3435029
|
| [8] |
F. Chen, R. Jiang, K. Zhang, B. Jiang, and G. Tao, “Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor uav,” IEEE Trans. Ind. Electrons., vol. 63, no. 8, pp. 5044–5056, 2016.
|
Figures(5) / Tables(1)






 DownLoad:
DownLoad: