A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
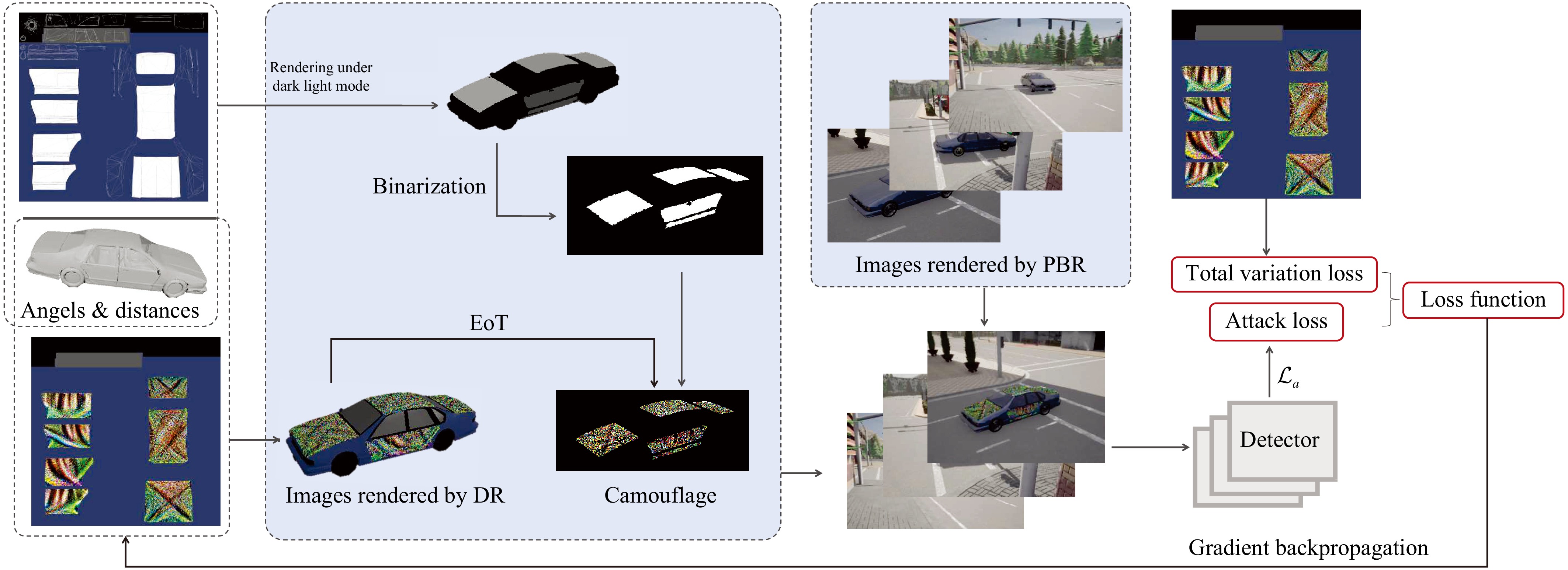
| Citation: | Y. Liu, H. Yan, X. Zhu, X. L. Hu, L. Tang, H. Su, and C. Lv, “Crafting physical adversarial examples by combining differentiable and physically based renders,” IEEE/CAA J. Autom. Sinica, early access, 2026. doi: 10.1109/JAS.2025.125438

|

| [1] |
I. J. Goodfellow, J. Shlens, and C. Szegedy, “Explaining and harnessing adversarial examples,” in Proc. 3rd Int. Conf. Learning Representations, San Diego, USA, 2015, pp. 1−11.
|
| [2] |
N. Carlini and D. Wagner, “Towards evaluating the robustness of neural networks,” in Proc. IEEE Symp. Security and Privacy, San Jose, USA, 2017, pp. 39−57.
|
| [3] |
A. Madry, A. Makelov, L. Schmidt, D. Tsipras, and A. Vladu, “Towards deep learning models resistant to adversarial attacks,” in Proc. 6th Int. Conf. Learning Representations, Vancouver, Canada, 2018, pp. 1−23.
|
| [4] |
Y. Dong, F. Liao, T. Pang, H. Su, J. Zhu, X. Hu, and J. Li, “Boosting adversarial attacks with momentum,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018, pp. 9185−9193.
|
| [5] |
D. Zhou, N. Wang, B. Han, and T. Liu, “Modeling adversarial noise for adversarial training,” in Proc. 39th Int. Conf. Machine Learning, Baltimore, USA, 2022, pp. 27353−27366.
|
| [6] |
L. Huang, C. Gao, Y. Zhou, C. Xie, A. L. Yuille, C. Zou, and N. Liu, “Universal physical camouflage attacks on object detectors,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Seattle, USA, 2020, pp. 717−726.
|
| [7] |
K. Xu, G. Zhang, S. Liu, Q. Fan, M. Sun, H. Chen, P.-Y. Chen, Y. Wang, and X. Lin, “Adversarial T-shirt! Evading person detectors in a physical world,” in Proc. 16th European Conf. Computer Vision, Glasgow, UK, 2020, pp. 665−681.
|
| [8] |
Z. Hu, S. Huang, X. Zhu, F. Sun, B. Zhang, and X. Hu, “Adversarial texture for fooling person detectors in the physical world,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, New Orleans, USA, 2022, pp. 13297−13306.
|
| [9] |
S. Thys, W. Van Ranst, and T. Goedemé, “Fooling automated surveillance cameras: Adversarial patches to attack person detection,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition Workshops, Long Beach, USA, 2019, pp. 49−55.
|
| [10] |
D. Wang, W. Yao, T. Jiang, W. Zhou, C. Li, and X. Chen, “Naturalistic-aware adversarial texture black-box attack for 3D objects against object detection in the physical world,” SSRN preprint SSRN:4545326, 2023.
|
| [11] |
J. Sun, W. Yao, T. Jiang, D. Wang, and X. Chen, “Differential evolution based dual adversarial camouflage: Fooling human eyes and object detectors,” Neural Netw., vol. 163, pp. 256–271, Jun. 2023. doi: 10.1016/j.neunet.2023.03.041
|
| [12] |
X. Zhu, Z. Hu, S. Huang, J. Li, and X. Hu, “Infrared invisible clothing: Hiding from infrared detectors at multiple angles in real world,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, New Orleans, USA, 2022, pp. 13307−13316.
|
| [13] |
X. Zhu, X. Li, J. Li, Z. Wang, and X. Hu, “Fooling thermal infrared pedestrian detectors in real world using small bulbs,” in Proc. 35th AAAI Conf. Artificial Intelligence, 2021, pp. 3616−3624.
|
| [14] |
H. Wei, Z. Wang, X. Jia, Y. Zheng, H. Tang, S. Satoh, and Z. Wang, “HOTCOLD block: Fooling thermal infrared detectors with a novel wearable design,” in Proc. 37th AAAI Conf. Artificial Intelligence, Washington, USA, 2023, pp. 15233−15241.
|
| [15] |
H. Wei, Z. Wang, K. Zhang, J. Hou, Y. Liu, H. Tang, and Z. Wang, “Revisiting adversarial patches for designing camera-agnostic attacks against person detection,” in Proc. 38th Int. Conf. Neural Information Processing Systems, Vancouver, Canada, 2024, pp. 259.
|
| [16] |
T. Wu, X. Ning, W. Li, R. Huang, H. Yang, and Y. Wang, “Physical adversarial attack on vehicle detector in the Carla simulator,” arXiv preprint arXiv: 2007.16118, 2020.
|
| [17] |
Z. Hu, W. Chu, X. Zhu, H. Zhang, B. Zhang, and X. Hu, “Physically realizable natural-looking clothing textures evade person detectors via 3D modeling,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Vancouver, Canada, 2023, pp. 16975−16984.
|
| [18] |
J. Wang, A. Liu, Z. Yin, S. Liu, S. Tang, and X. Liu, “Dual attention suppression attack: Generate adversarial camouflage in physical world,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Nashville, USA, 2021, pp. 8561−8570.
|
| [19] |
D. Wang, T. Jiang, J. Sun, W. Zhou, Z. Gong, X. Zhang, W. Yao, and X. Chen, “FCA: Learning a 3D full-coverage vehicle camouflage for multi-view physical adversarial attack,” in Proc. 36th AAAI Conf. Artificial Intelligence, 2022, pp. 2414−2422.
|
| [20] |
Y. Zhang, Z. Gong, Y. Zhang, K. Bin, Y. Li, J. Qi, H. Wen, and P. Zhong, “Boosting transferability of physical attack against detectors by redistributing separable attention,” Pattern Recognit., vol. 138, p. 109435, Jun. 2023. doi: 10.1016/j.patcog.2023.109435
|
| [21] |
Y. Duan, J. Chen, X. Zhou, J. Zou, Z. He, J. Zhang, W. Zhang, and Z. Pan, “Learning coated adversarial camouflages for object detectors,” in Proc. 31st Int. Joint Conf. Artificial Intelligence, Vienna, Austria, 2022, pp. 891−897.
|
| [22] |
N. Suryanto, Y. Kim, H. Kang, H. T. Larasati, Y. Yun, T.-T.-H. Le, H. Yang, S.-Y. Oh, and H. Kim, “DTA: Physical camouflage attacks using differentiable transformation network,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, New Orleans, USA, 2022, pp. 15284−15293.
|
| [23] |
N. Suryanto, Y. Kim, H. T. Larasati, H. Kang, T.-T.-H. Le, Y. Hong, H. Yang, S.-Y. Oh, and H. Kim, “ACTIVE: Towards highly transferable 3D physical camouflage for universal and robust vehicle evasion,” in Proc. IEEE/CVF Int. Conf. Computer Vision, Paris, France, 2023, pp. 4282−4291.
|
| [24] |
C. Szegedy, W. Zaremba, I. Sutskever, J. Bruna, D. Erhan, I. Goodfellow, and R. Fergus, “Intriguing properties of neural networks,” in Proc. 2nd Int. Conf. Learning Representations, 2013, pp. 1−10.
|
| [25] |
S.-M. Moosavi-Dezfooli, A. Fawzi, O. Fawzi, and P. Frossard, “Universal adversarial perturbations,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Honolulu, USA, 2017, pp. 86−94.
|
| [26] |
S.-M. Moosavi-Dezfooli, A. Fawzi, and P. Frossard, “DeepFool: A simple and accurate method to fool deep neural networks,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Las Vegas, USA, 2016, pp. 2574−2582.
|
| [27] |
J. Su, D. V. Vargas, and K. Sakurai, “One pixel attack for fooling deep neural networks,” IEEE Trans. EComput., vol. 23, no. 5, pp. 828–841, Oct. 2019. doi: 10.1109/tevc.2019.2890858
|
| [28] |
A. Athalye, L. Engstrom, A. Ilyas, and K. Kwok, “Synthesizing robust adversarial examples,” in Proc. 35th Int. Conf. Machine Learning, Stockholm, Sweden, 2018, pp. 284−293.
|
| [29] |
K. Eykholt, I. Evtimov, E. Fernandes, B. Li, A. Rahmati, C. Xiao, A. Prakash, T. Kohno, and D. Song, “Robust physical-world attacks on deep learning visual classification,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018, pp. 1625−1634.
|
| [30] |
J. Li, F. Schmidt, and Z. Kolter, “Adversarial camera stickers: A physical camera-based attack on deep learning systems,” in Proc. 36th Int. Conf. Machine Learning, Long Beach, USA, 2019, pp. 3896−3904.
|
| [31] |
R. Duan, X. Ma, Y. Wang, J. Bailey, A. K. Qin, and Y. Yang, “Adversarial camouflage: Hiding physical-world attacks with natural styles,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Seattle, USA, 2020, pp. 997−1005.
|
| [32] |
S.-T. Chen, C. Cornelius, J. Martin, and D. H. Chau, “ShapeShifter: Robust physical adversarial attack on Faster R-CNN object detector,” in Proc. European Conf. Machine Learning and Knowledge Discovery in Databases, Dublin, Ireland, 2019, pp. 52−68.
|
| [33] |
Y. Zhang, H. Foroosh, P. David, and B. Gong, “CAMOU: Learning a vehicle camouflage for physical adversarial attack on object detectors in the wild,” in Proc. 7th Int. Conf. Learning Representations, New Orleans, LA, USA, 2019, pp. 1−20.
|
| [34] |
A. Sanders, An Introduction to Unreal Engine 4. New York, USA: A K Peters/CRC Press, 2016.
|
| [35] |
H. Kato, Y. Ushiku, and T. Harada, “Neural 3D mesh renderer,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018, pp. 3907−3916.
|
| [36] |
J. Johnson, N. Ravi, J. Reizenstein, D. Novotny, S. Tulsiani, C. Lassner, and S. Branson, “Accelerating 3D deep learning with PyTorch3D,” in Proc. SIGGRAPH Asia Courses, 2020, pp. 10.
|
| [37] |
E. Meloni, M. Tiezzi, L. Pasqualini, M. Gori, and S. Melacci, “Messing up 3D virtual environments: Transferable adversarial 3D objects,” in Proc. 20th IEEE Int. Conf. Machine Learning and Applications, Pasadena, USA, 2021, pp. 1−8.
|
| [38] |
D. Derakhshani, Introducing Autodesk MAYA 2013. Indianapolis, USA: John Wiley & Sons, 2012.
|
| [39] |
M. Sharif, S. Bhagavatula, L. Bauer, and M. K. Reiter, “Accessorize to a crime: Real and stealthy attacks on state-of-the-art face recognition,” in Proc. ACM SIGSAC Conf. Computer and Communications Security, 2016, pp. 1528−1540.
|
| [40] |
T.-Y. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Dollár, and C. L. Zitnick, “Microsoft COCO: Common objects in context,” in Proc. 13th European Conf. Computer Vision, Zurich, Switzerland, 2014, pp. 740−755.
|
| [41] |
J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, and L. Fei-Fei, “ImageNet: A large-scale hierarchical image database,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Miami, USA, 2009, pp. 248−255.
|
| [42] |
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V. Koltun, “CARLA: An open urban driving simulator,” in Proc. 1st Annu. Conf. Robot Learning, Mountain View, USA, 2017, pp. 1−16.
|
| [43] |
S. Ren, K. He, R. Girshick, and J. Sun, “Faster R-CNN: Towards real-time object detection with region proposal networks,” in Proc. 29th Int. Conf. Neural Information Processing Systems, Montreal, Canada, 2015, pp. 91−99.
|
| [44] |
J. Redmon and A. Farhadi, “YOLOv3: An incremental improvement,” arXiv preprint arXiv: 1804.02767, 2018.
|
| [45] |
W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.-Y. Fu, and A. C. Berg, “SSD: Single shot MultiBox detector,” in Proc. 14th European Conf. Computer Vision, Amsterdam, The Netherlands, 2016, pp. 21−37.
|
| [46] |
N. Carion, F. Massa, G. Synnaeve, N. Usunier, A. Kirillov, and S. Zagoruyko, “End-to-end object detection with transformers,” in Proc. 16th European Conf. Computer Vision, Glasgow, UK, 2020, pp. 213−229.
|
| [47] |
H. Zhang, F. Li, S. Liu, L. Zhang, H. Su, J. Zhu, L. M. Ni, and H.-Y. Shum, “DINO: DETR with improved DeNoising anchor boxes for end-to-end object detection,” in Proc. 11th Int. Conf. Learning Representations, Kigali, Rwanda, 2023, pp. 1−19.
|
| [48] |
S. Zhang, X. Wang, J. Wang, J. Pang, C. Lyu, W. Zhang, P. Luo, and K. Chen, “Dense distinct query for end-to-end object detection,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Vancouver, Canada, 2023, pp. 7329−7338.
|
| [49] |
W. Xu, D. Evans, and Y. Qi, “Feature squeezing: Detecting adversarial examples in deep neural networks,” in Proc. Network and Distributed Systems Security Symp., San Diego, USA, 2018, pp. 1−15.
|
| [50] |
C. Yu, J. Chen, Y. Xue, Y. Liu, W. Wan, J. Bao, and H. Ma, “Defending against universal adversarial patches by clipping feature norms,” in Proc. IEEE/CVF Int. Conf. Computer Vision, Montreal, QC, Canada, 2021, pp. 16414−16422.
|
| [51] |
T. DeVries and G. W. Taylor, “Improved regularization of convolutional neural networks with cutout,” arXiv preprint arXiv: 1708.04552, 2017.
|
Figures(15) / Tables(6)






 DownLoad:
DownLoad: