A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Yue, H. Zhang, J. Sun, and X. Guo, “Universal intermittent state-constrained control without feasibility condition for nonlinear systems,” IEEE/CAA J. Autom. Sinica, 2025. doi: 10.1109/JAS.2025.125357

|

| [1] |
A. Bemporad, “Reference governor for constrained nonlinear systems,” IEEE Trans. Automatic Control, vol. 43, no. 3, pp. 415–419, 1998. doi: 10.1109/9.661611
|
| [2] |
L. Burlion, R. Schieni, and I. V. Kolmanovsky, “A reference governor for linear systems with polynomial constraints,” Automatica, vol. 142, p. 110313, 2022. doi: 10.1016/j.automatica.2022.110313
|
| [3] |
H. Li and Y. Shi, “Robust distributed model predictive control of constrained continuous-time nonlinear systems: A robustness constraint approach,” IEEE Trans. Automatic Control, vol. 59, no. 6, pp. 1673–1678, 2014. doi: 10.1109/TAC.2013.2294618
|
| [4] |
M. V. Kothare, V. Balakrishnan, and M. Morari, “Robust constrained model predictive control using linear matrix inequalities,” Automatica, vol. 32, no. 10, pp. 1361–1379, 1996. doi: 10.1016/0005-1098(96)00063-5
|
| [5] |
W. Zhao, Y. Liu, and L. Liu, “Observer-based adaptive fuzzy tracking control using integral barrier lyapunov functionals for a nonlinear system with full state constraints,” IEEE/CAA Journal of Automatica Sinica, vol. 8, no. 3, pp. 617–627, 2021. doi: 10.1109/JAS.2021.1003877
|
| [6] |
K. B. Ngo, R. Mahony, and Z.-P. Jiang, “Integrator backstepping using barrier functions for systems with multiple state constraints,” in Proc. the 44th IEEE Conf. on Decision and Control, pp. 8306–8312, IEEE, 2005.
|
| [7] |
K. P. Tee, S. S. Ge, and E. H. Tay, “Barrier lyapunov functions for the control of output-constrained nonlinear systems,” Automatica, vol. 45, no. 4, pp. 918–927, 2009. doi: 10.1016/j.automatica.2008.11.017
|
| [8] |
S. Guo, Y. Pan, H. Li, and L. Cao, “Dynamic event-driven adp for n-player nonzero-sum games of constrained nonlinear systems,” IEEE Trans. Automation Science and Engineering, 2024: 10.1109/TASE.2024.3467382. doi: 10.1109/TASE.2024.3467382
|
| [9] |
Y.-J. Liu and S. Tong, “Barrier lyapunov functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints,” Automatica, vol. 64, pp. 70–75, 2016. doi: 10.1016/j.automatica.2015.10.034
|
| [10] |
H. Zhang, Y. Liu, and Y. Wang, “Observer-based finite-time adaptive fuzzy control for nontriangular nonlinear systems with full-state constraints,” IEEE Trans. Cybernetics, vol. 51, no. 3, pp. 1110–1120, 2020.
|
| [11] |
A. Mousavi, A. H. D. Markazi, and A. Ferrara, “A barrier-function-based second-order sliding mode control with optimal reaching for full-state and input-constrained nonlinear systems,” IEEE Trans. Automatic Control, vol. 69, no. 1, pp. 395–402, 2024. doi: 10.1109/TAC.2023.3263076
|
| [12] |
X. Jin, “Adaptive fixed-time control for mimo nonlinear systems with asymmetric output constraints using universal barrier functions,” IEEE Trans. Automatic Control, vol. 64, no. 7, pp. 3046–3053, 2019. doi: 10.1109/TAC.2018.2874877
|
| [13] |
Y.-D. Song and S. Zhou, “Tracking control of uncertain nonlinear systems with deferred asymmetric time-varying full state constraints,” Automatica, vol. 98, pp. 314–322, 2018. doi: 10.1016/j.automatica.2018.09.032
|
| [14] |
L. Kong, W. He, Z. Liu, X. Yu, and C. Silvestre, “Adaptive tracking control with global performance for output-constrained mimo nonlinear systems,” IEEE Trans. Automatic Control, vol. 68, no. 6, pp. 3760–3767, 2023. doi: 10.1109/TAC.2022.3201258
|
| [15] |
K. Zhao, L. Chen, and C. L. P. Chen, “Event-based adaptive neural control of nonlinear systems with deferred constraint,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 52, no. 10, pp. 6273–6282, 2022. doi: 10.1109/TSMC.2022.3143359
|
| [16] |
X. Yue, H. Zhang, J. Sun, and X. Liu, “A simplified fuzzy wavelet neural control for nonlinear systems with quantized inputs and deferred constraints,” IEEE Trans. Fuzzy Systems, vol. 32, no. 3, pp. 1504–1514, 2024. doi: 10.1109/TFUZZ.2023.3325450
|
| [17] |
X. Yue, H. Zhang, J. Sun, T. Wang, and L. Liu, “Optimized backstepping-based containment control for multiagent systems with deferred constraints using a universal nonlinear transformation,” IEEE Trans. Cybernetics, vol. 54, no. 10, pp. 6058–6068, 2024. doi: 10.1109/TCYB.2024.3440004
|
| [18] |
F. Wang, L. Long, and C. Xiang, “Event-triggered state-dependent switching for adaptive fuzzy control of switched nonlinear systems,” IEEE Trans. Fuzzy Systems, vol. 32, no. 4, pp. 1756–1767, 2024. doi: 10.1109/TFUZZ.2023.3333911
|
| [19] |
X. Guo, H. Zhang, X. Yue, and T. Wang, “Optimized backstepping cooperative control for output-constrained stochastic nonlinear network systems via a multibridge-hole function,” IEEE Trans. Cybernetics, 2024, doi: 10.1109/TCYB.2024.3384467.
|
| [20] |
K. Zhao and Y. Song, “Decision function-based adaptive control of uncertain systems subject to irregular output constraints,” IEEE Trans. Automatic Control, vol. 69, no. 11, pp. 8026–8033, 2024. doi: 10.1109/TAC.2024.3406580
|
| [21] |
K. Zhao and Y. Song, “Removing the feasibility conditions imposed on tracking control designs for state-constrained strict-feedback systems,” IEEE Trans. Automatic Control, vol. 64, no. 3, pp. 1265–1272, 2019. doi: 10.1109/TAC.2018.2845707
|
| [22] |
K. Zhao, Y. Song, C. P. Chen, and L. Chen, “Control of nonlinear systems under dynamic constraints: A unified barrier function-based approach,” Automatica, vol. 119, p. 109102, 2020. doi: 10.1016/j.automatica.2020.109102
|
| [23] |
L.-X. Wang, J. M. Mendel, et al, “Fuzzy basis functions, universal approximation, and orthogonal least-squares learning,” IEEE transactions on Neural Networks, vol. 3, no. 5, pp. 807–814, 1992. doi: 10.1109/72.159070
|
| [24] |
H. Zhang, Y. Yan, Y. Mu, and Z. Ming, “Neural network-based adaptive sliding-mode control for fractional order fuzzy system with unmatched disturbances and time-varying delays,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 53, no. 8, pp. 5174–5184, 2023. doi: 10.1109/TSMC.2023.3257415
|
| [25] |
X. Yue, H. Zhang, J. Sun, and L. Zhang, “Distributed saturation-tolerant fuzzy control for constrained stochastic multi-agent systems with resilient quantitative behaviors,” IEEE Trans. Fuzzy Systems, 2024, doi: 10.1109/TFUZZ.2023.3347581.
|
| [26] |
C. Ma and D. Dong, “Finite-time prescribed performance time-varying formation control for second-order multi-agent systems with non-strict feedback based on a neural network observer,” IEEE/CAA Journal of Automatica Sinica, vol. 11, no. 4, pp. 1039–1050, 2024. doi: 10.1109/JAS.2023.123615
|
| [27] |
H. Zhang, Y. Liu, J. Dai, and Y. Wang, “Command filter based adaptive fuzzy finite-time control for a class of uncertain nonlinear systems with hysteresis,” IEEE Trans. Fuzzy Systems, vol. 29, no. 9, pp. 2553–2564, 2021. doi: 10.1109/TFUZZ.2020.3003499
|
| [28] |
W. Chang, Y. Li, and S. Tong, “Adaptive fuzzy backstepping tracking control for flexible robotic manipulator,” IEEE/CAA Journal of Automatica Sinica, vol. 8, no. 12, pp. 1923–1930, 2021. doi: 10.1109/JAS.2017.7510886
|
| [29] |
H. Zhang, X. Guo, J. Sun, and Y. Zhou, “Event-triggered cooperative adaptive fuzzy control for stochastic nonlinear systems with measurement sensitivity and deception attacks,” IEEE Trans. Fuzzy Systems, vol. 31, no. 3, pp. 774–785, 2023. doi: 10.1109/TFUZZ.2022.3189412
|
| [30] |
L. Cao, Y. Pan, H. Liang, and C. K. Ahn, “Event-based adaptive neural network control for large-scale systems with nonconstant control gains and unknown measurement sensitivity,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 54, no. 11, pp. 7027–7038, 2024. doi: 10.1109/TSMC.2024.3444007
|
| [31] |
X. Shao and H. Wang, “Back-stepping robust trajectory linearization control for hypersonic reentry vehicle via novel tracking differentiator,” Journal of the Franklin Institute, vol. 353, no. 9, pp. 1957–1984, 2016. doi: 10.1016/j.jfranklin.2016.03.007
|
| [32] |
J. Chen and C. Hua, “Adaptive full-state-constrained control of nonlinear systems with deferred constraints based on nonbarrier lyapunov function method,” IEEE Trans. Cybernetics, vol. 52, no. 8, pp. 7634–7642, 2022. doi: 10.1109/TCYB.2020.3036646
|
| [33] |
B. Ren, S. S. Ge, C.-Y. Su, and T. H. Lee, “Adaptive neural control for a class of uncertain nonlinear systems in pure-feedback form with hysteresis input,” IEEE Trans. Systems, Man, and Cybernetics, Part B (Cybernetics), vol. 39, no. 2, pp. 431–443, 2008.
|
| [34] |
S. Yang, H. Liang, Y. Pan, and T. Li, “Security control for air-sea heterogeneous multiagent systems with cooperative-antagonistic interactions: An intermittent privacy preservation mechanism,” Sci. China Technol. Sci, 2024.
|
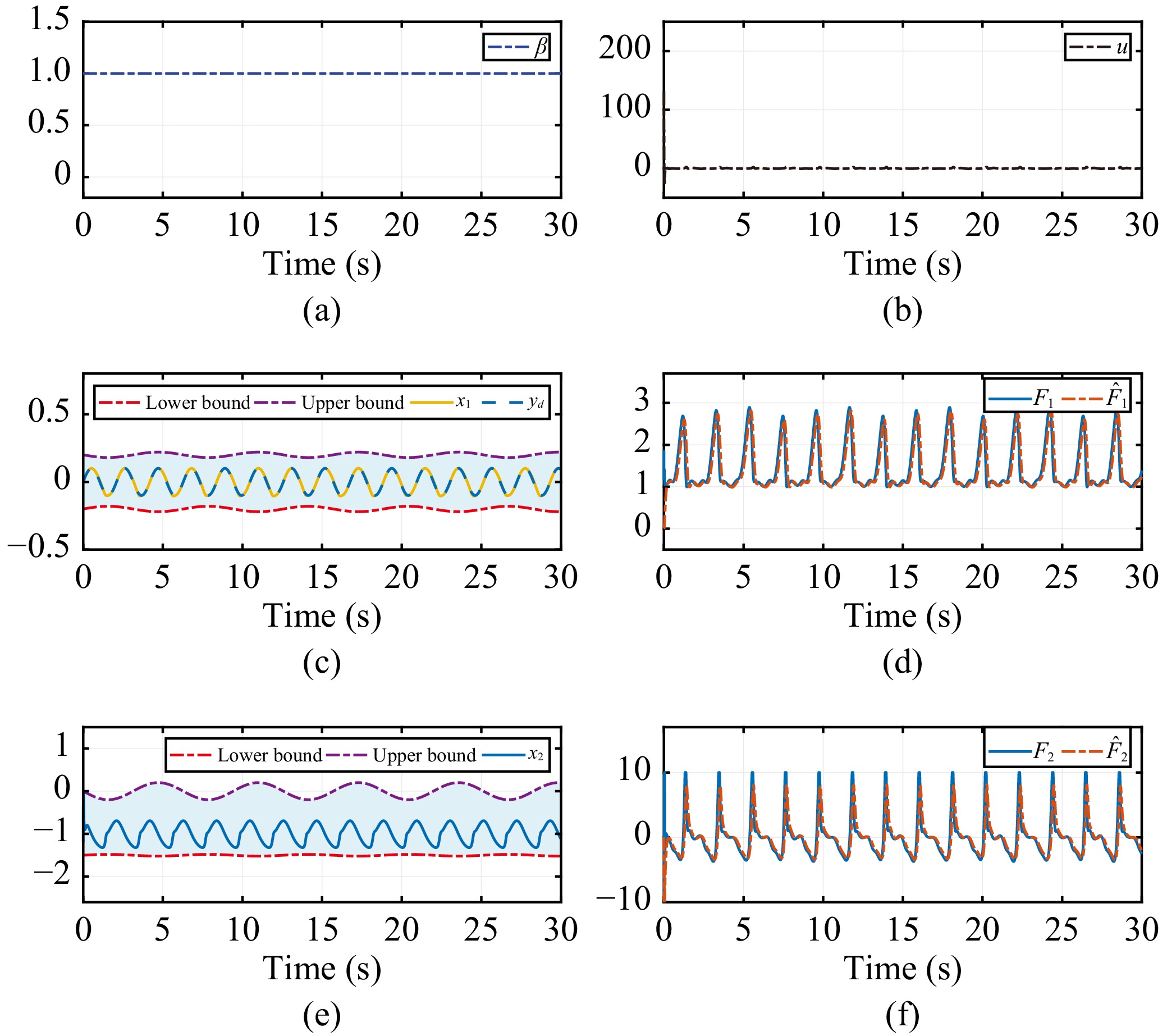
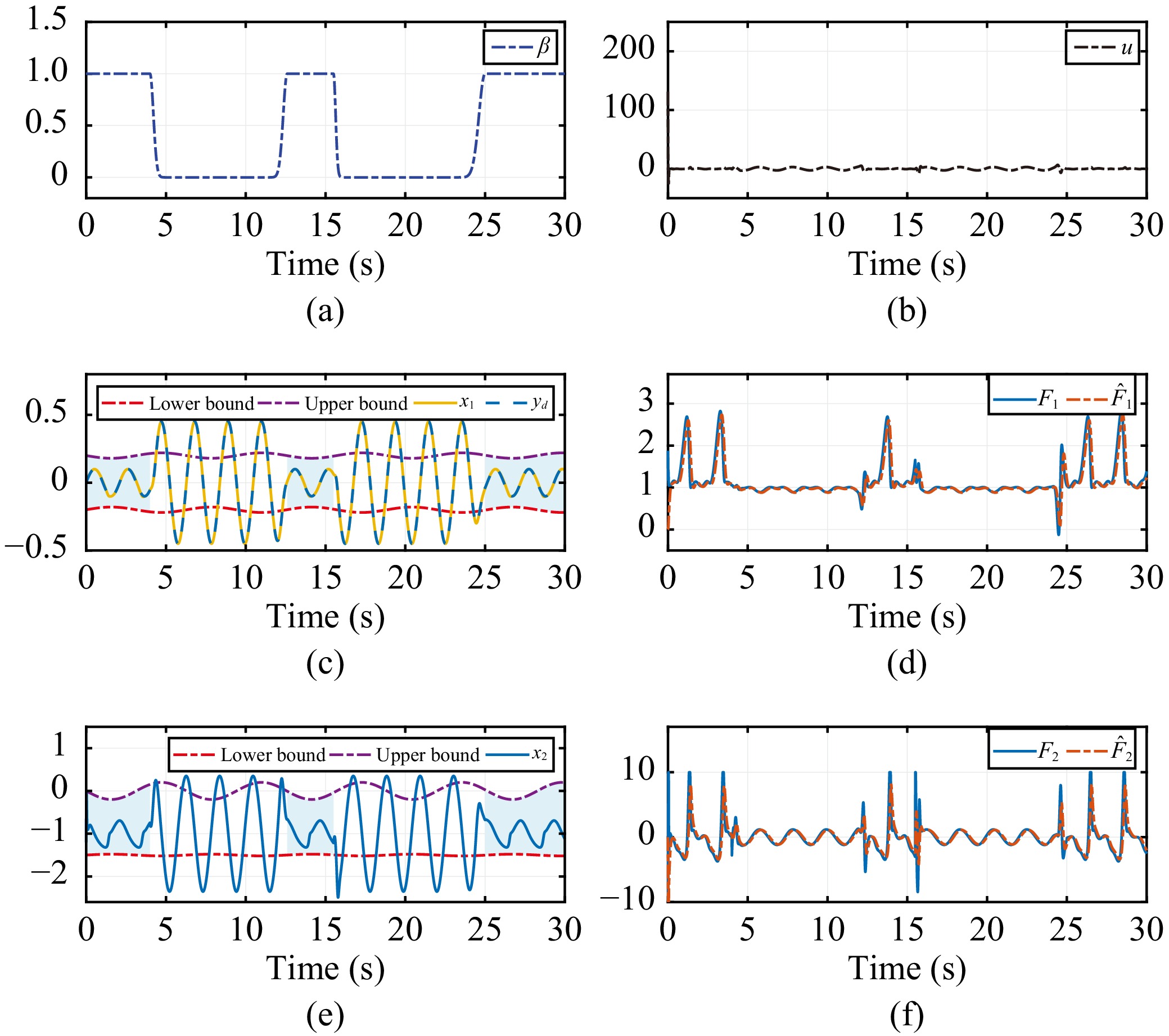
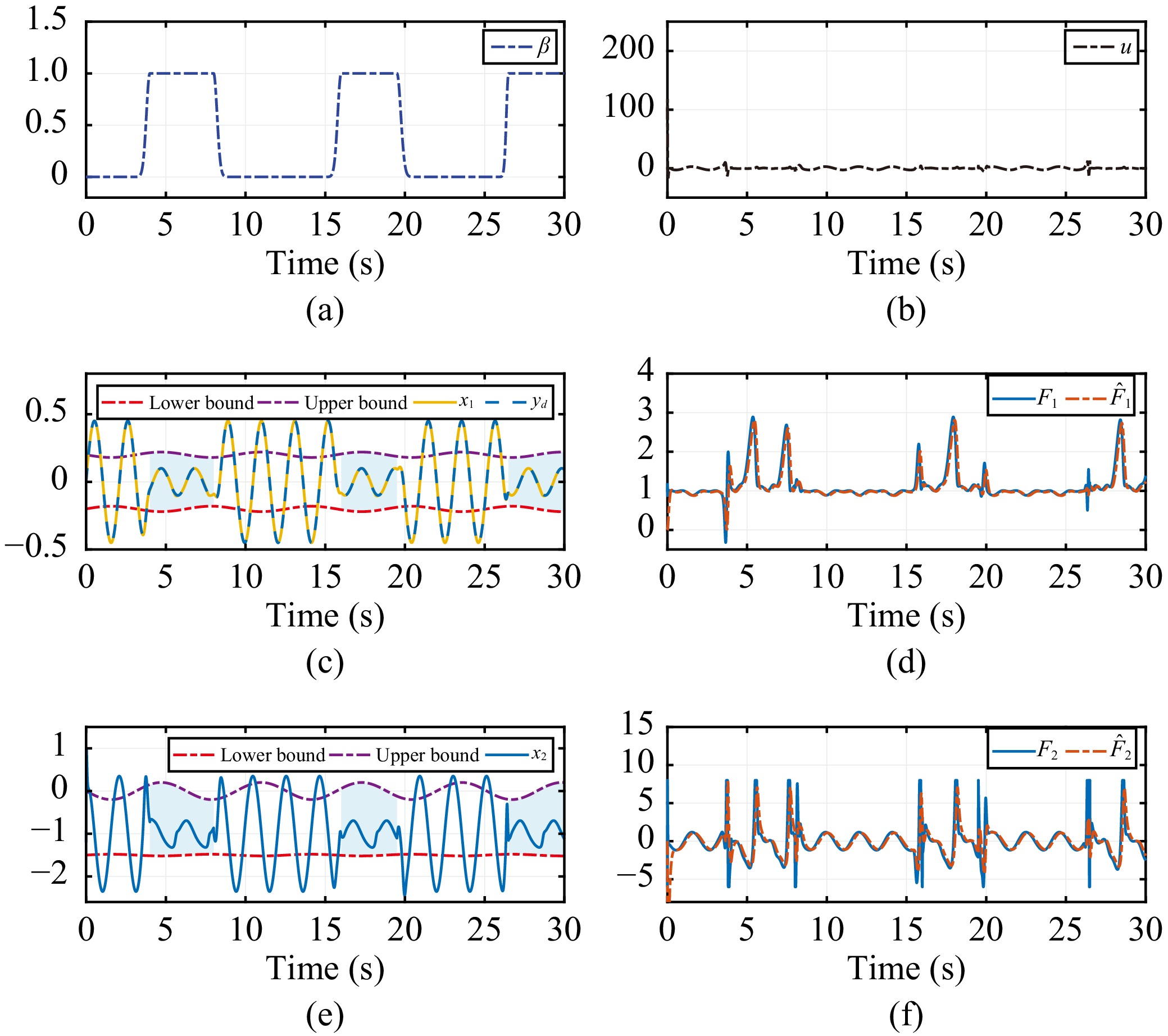
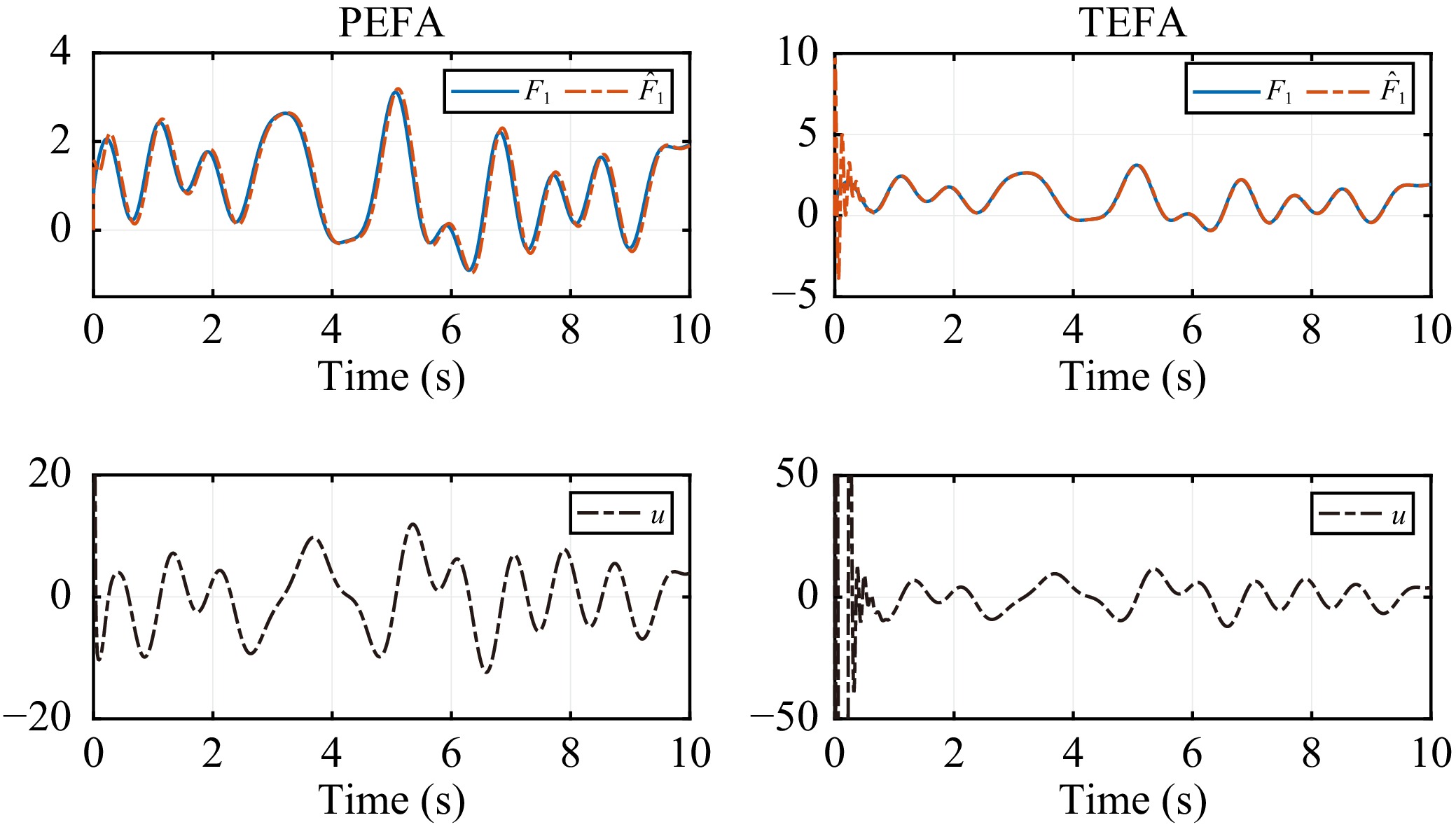
Figures(9)






 DownLoad:
DownLoad: