A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 12
Issue 3
Volume 12
Issue 3
IEEE/CAA Journal of Automatica Sinica
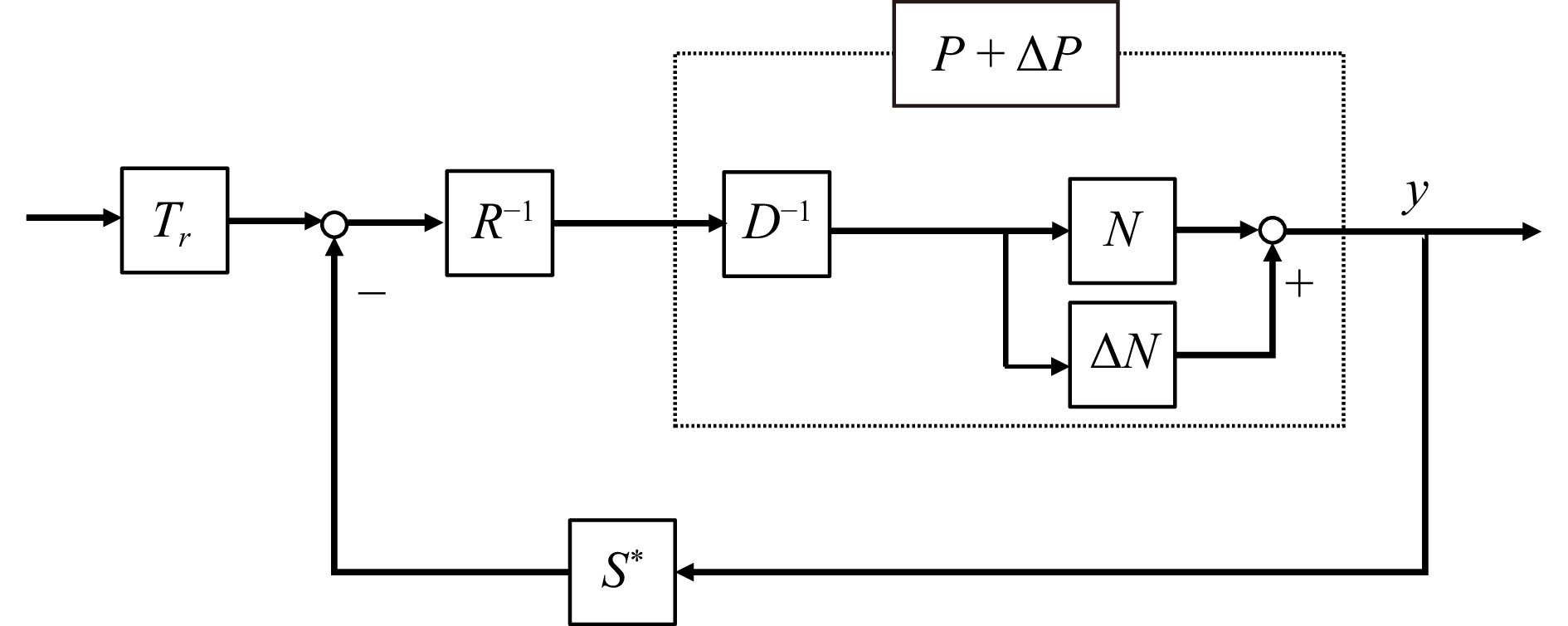
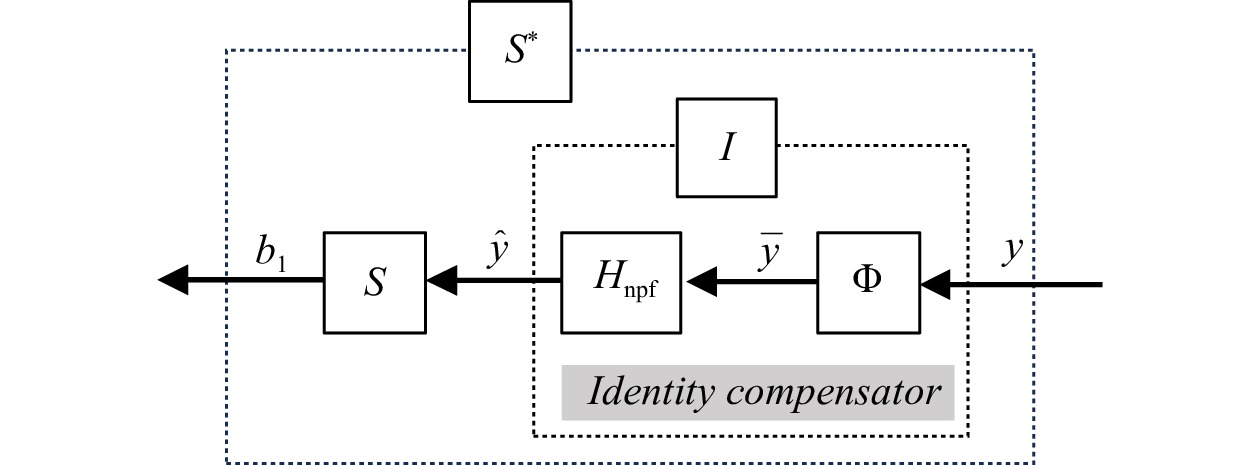
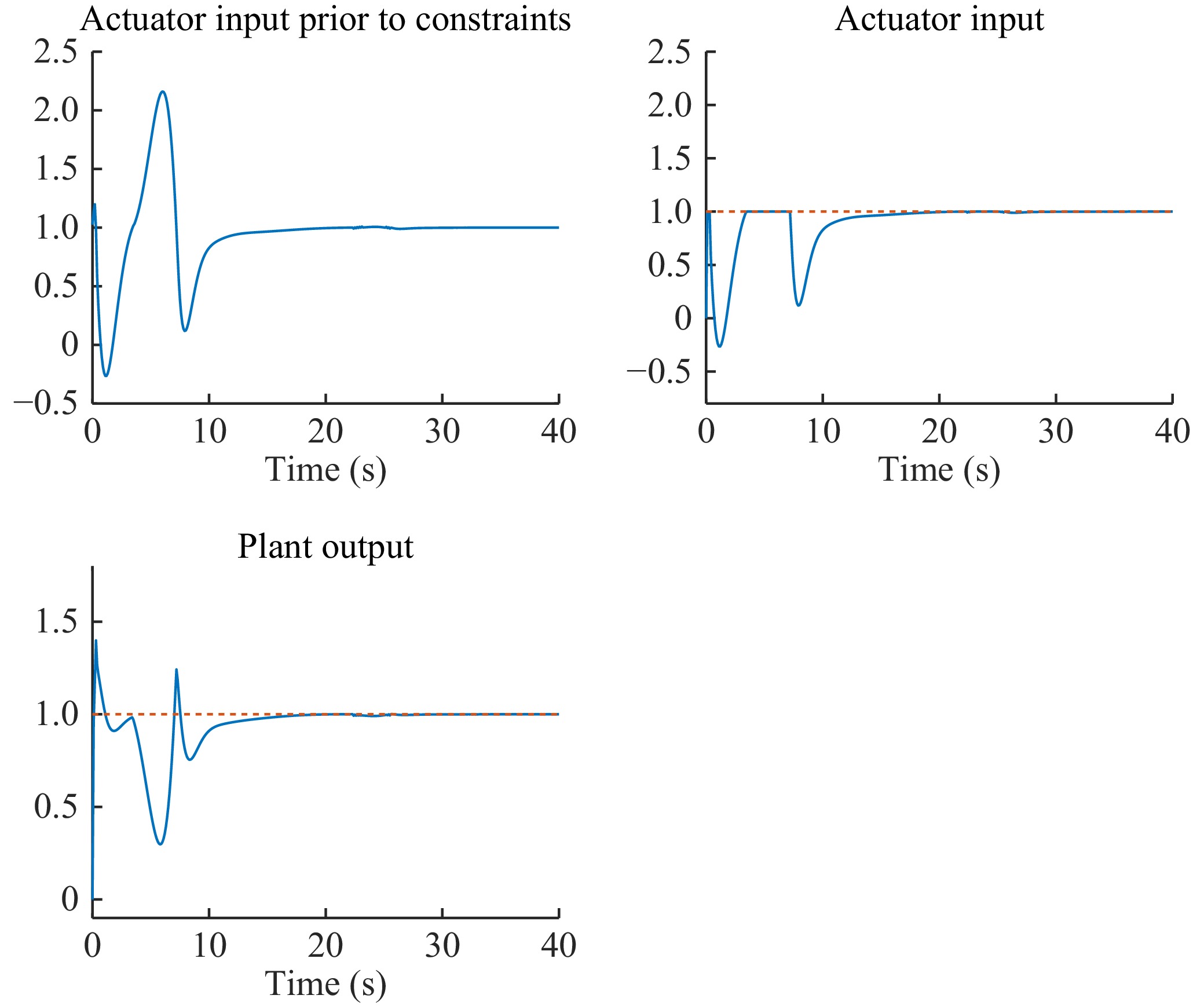
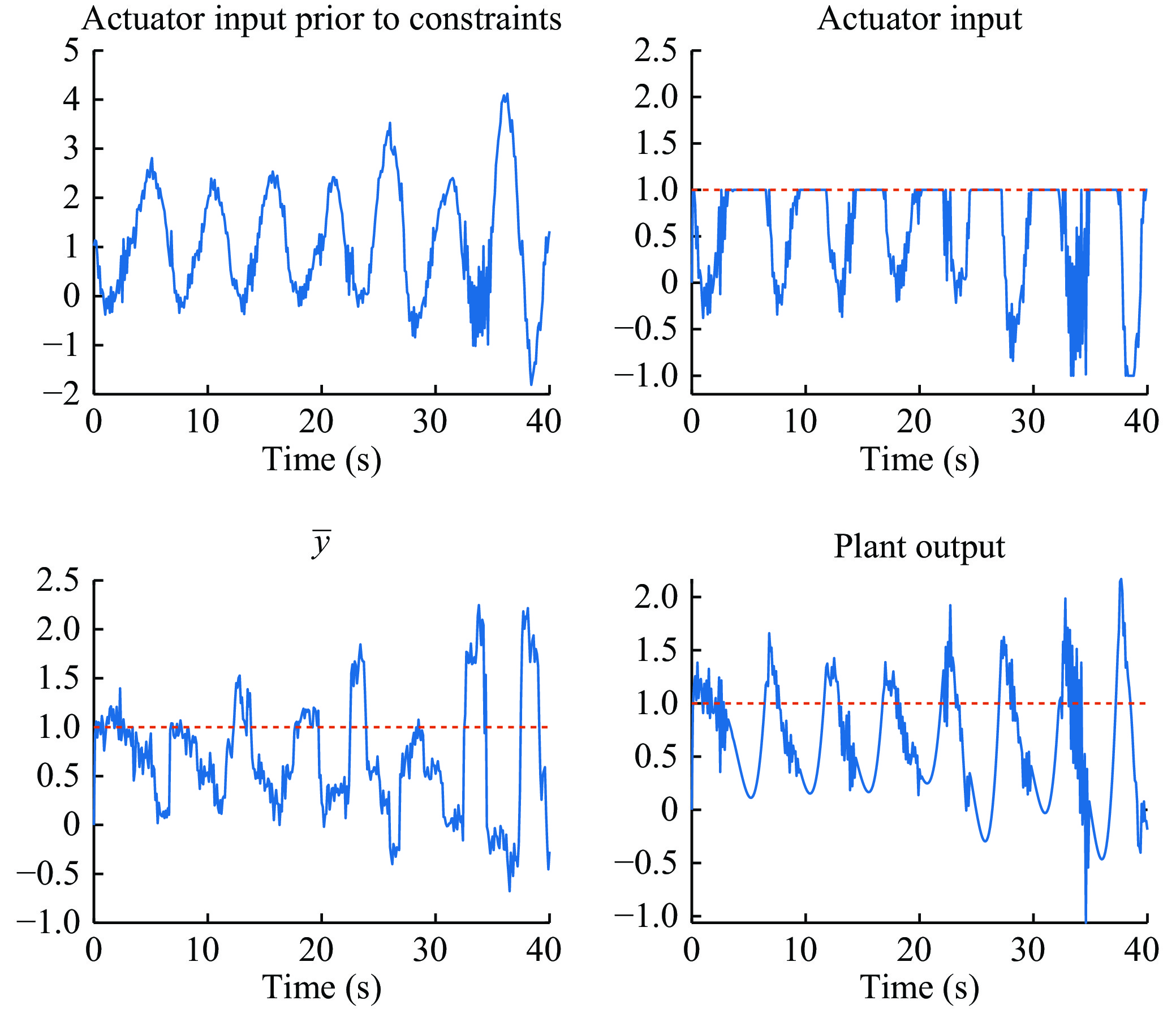
| Citation: | Y. Xu and M. Deng, “Nonlinear control for unstable networked plants in the presence of actuator and sensor limitations using robust right coprime factorization,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 3, pp. 516–527, Mar. 2025. doi: 10.1109/JAS.2024.124854

|

| [1] |
H. Geng, Z. Wang, L. Ma, Y. Cheng, and Q.-L. Han, “Distributed filter design over sensor networks under try-once-discard protocol: Dealing with sensor-bias-corrupted measurement censoring,” IEEE Trans. Syst. Man Cybern. Syst., vol. 54, no. 5, pp. 3032–3043, May 2024. doi: 10.1109/TSMC.2024.3354883
|
| [2] |
Z.-Q. Liu, X. Ge, Q.-L. Han, and Y.-L. Wang, “Reinforcement learning-based cooperative target tracking control of unmanned surface vehicles under data falsification attacks,” IEEE Trans. Intell. Veh., 2024, DOI: 10.1109/TIV.2024.3396171.
|
| [3] |
T. Hu and Z. Lin, Control Systems with Actuator Saturation: Analysis and Design. Boston, USA: Springer, 2001.
|
| [4] |
T. Hu, Z. Lin, and B. M. Chen, “An analysis and design method for linear systems subject to actuator saturation and disturbance,” Automatica, vol. 38, no. 2, pp. 351–359, Feb. 2002. doi: 10.1016/S0005-1098(01)00209-6
|
| [5] |
Y.-Y. Cao and Z. Lin, “Robust stability analysis and fuzzy-scheduling control for nonlinear systems subject to actuator saturation,” IEEE Trans. Fuzzy Syst., vol. 11, no. 1, pp. 57–67, Feb. 2003. doi: 10.1109/TFUZZ.2002.806317
|
| [6] |
H. Su, M. Z. Q. Chen, J. Lam, and Z. Lin, “Semi-global leader-following consensus of linear multi-agent systems with input saturation via low gain feedback,” IEEE Trans. Circuits Syst. I Regul. Pap., vol. 60, no. 7, pp. 1881–1889, Jul. 2013. doi: 10.1109/TCSI.2012.2226490
|
| [7] |
H. Demircioglu and C. Yavuzyilmaz, “Constrained predictive control in continuous time,” IEEE Control Syst. Mag., vol. 22, no. 4, pp. 57–67, Aug. 2002. doi: 10.1109/MCS.2002.1021645
|
| [8] |
P. J. Gawthrop and H. Demircioğlu, “Continuous-time generalized predictive control (CGPC),” IFAC Proc. Vol., vol. 23, no. 1, pp. 67–72, Apr. 1990. doi: 10.1016/S1474-6670(17)52697-X
|
| [9] |
X.-F. Wang, J. Jiang, and W.-H. Chen, “A hierarchical control framework for autonomous decision-making systems: Integrating HMDP and MPC,” arXiv preprint arXiv: 2401.06833, 2024.
|
| [10] |
L. Xu, H. Liu, X. Zhu, W.-H. Chen, W. Fan, C. Zhang, L. Quan, and H. Yang, “Robust predictive current control of hybrid-excited axial flux-switching PM motor based on multiple-resolution parameter identification,” IEEE Trans. Ind. Electron., vol. 71, no. 11, pp. 13708–13719, Nov. 2024. doi: 10.1109/TIE.2024.3374390
|
| [11] |
Y. Yan, X.-F. Wang, B. J. Marshall, C. Liu, J. Yang, and W.-H. Chen, “Surviving disturbances: A predictive control framework with guaranteed safety,” Automatica, vol. 158, pp. 111238, Dec. 2023. doi: 10.1016/j.automatica.2023.111238
|
| [12] |
B. Xu, A. Suleman, and Y. Shi, “A multi-rate hierarchical fault-tolerant adaptive model predictive control framework: Theory and design for quadrotors,” Automatica, vol. 153, pp. 111015, Jul. 2023. doi: 10.1016/j.automatica.2023.111015
|
| [13] |
A. D. Carnerero, D. R. Ramirez, D. Limon, and T. Alamo, “Kernel-based state-space Kriging for predictive control,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1263–1275, May 2023. doi: 10.1109/JAS.2023.123459
|
| [14] |
Y. Rahman, A. Sharma, M. Jankovic, M. Santillo, and M. Hafner, “Driver intent prediction and collision avoidance with barrier functions,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 365–375, Feb. 2023. doi: 10.1109/JAS.2023.123210
|
| [15] |
Y. Yang, B. Shen, and Q.-L. Han, “Dynamic event-triggered scaled consensus of multi-agent systems in reliable and unreliable networks,” IEEE Trans. Syst. Man Cybern. Syst., vol. 54, no. 2, pp. 1124–1136, Feb. 2024. doi: 10.1109/TSMC.2023.3324142
|
| [16] |
Z.-Q. Liu, X. Ge, H. Xie, Q.-L. Han, J. Zheng, and Y.-L. Wang, “Secure leader–follower formation control of networked mobile robots under replay attacks,” IEEE Trans. Ind. Inform., vol. 20, no. 3, pp. 4149–4159, Mar. 2024. doi: 10.1109/TII.2023.3313651
|
| [17] |
Z. Zhang, C. Yang, and X. Chen, “Decentralized model reference adaptive control for systems with time delays and dead zones,” IEEE Trans. Automat. Contr., vol. 68, no. 7, pp. 4367–4374, Jul. 2023.
|
| [18] |
A. Wang and M. Deng, “Operator-based robust nonlinear tracking control for a human multi-joint arm-like manipulator with unknown time-varying delays,” Appl. Math. Inf. Sci., vol. 6, no. 3, pp. 459–468, Sep. 2012.
|
| [19] |
O. V. Lounasmaa and H. Seppä, “SQUIDs in neuro- and cardiomagnetism,” J. Low Temp. Phys., vol. 135, no. 5, pp. 295–335, Jun. 2004.
|
| [20] |
X. Ge, Q.-L. Han, X.-M. Zhang, and D. Ding, “Communication resource-efficient vehicle platooning control with various spacing policies,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 362–376, Feb. 2024. doi: 10.1109/JAS.2023.123507
|
| [21] |
Y. Xu and M. Deng, “Particle filter design for robust nonlinear control system of uncertain heat exchange process with sensor noise and communication time delay,” Appl. Sci., vol. 12, no. 5, pp. 2495, Feb. 2022. doi: 10.3390/app12052495
|
| [22] |
M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking,” IEEE Trans. Signal Process., vol. 50, no. 2, pp. 174–188, Feb. 2002. doi: 10.1109/78.978374
|
| [23] |
H. Geng, Z. Wang, J. Hu, Q.-L. Han, and Y. Cheng, “Variance-constrained filter design with sensor resolution under round-robin communication protocol: An outlier-resistant mechanism,” IEEE Trans. Syst. Man Cybern. Syst., vol. 53, no. 6, pp. 3762–3773, Jun. 2023. doi: 10.1109/TSMC.2023.3234461
|
| [24] |
G. Chen and Z. Han, “Robust right coprime factorization and robust stabilization of nonlinear feedback control systems,” IEEE Trans. Automat. Contr., vol. 43, no. 10, pp. 1505–1509, Oct. 1998. doi: 10.1109/9.720519
|
| [25] |
M. Deng, A. Inoue, and K. Ishikawa, “Operator-based nonlinear feedback control design using robust right coprime factorization,” IEEE Trans. Automat. Contr., vol. 51, no. 4, pp. 645–648, Apr. 2006. doi: 10.1109/TAC.2006.872758
|
| [26] |
M. Deng, A. Inoue, and A. Yanou, “Stable robust feedback control system design for unstable plants with input constraints using robust right coprime factorization,” Int. J. Robust Nonlinear Control, vol. 17, no. 18, pp. 1716–1733, Dec. 2007. doi: 10.1002/rnc.1189
|
| [27] |
N. Bu and M. Deng, “System design for nonlinear plants using operator-based robust right coprime factorization and isomorphism,” IEEE Trans. Automat. Contr., vol. 56, no. 4, pp. 952–957, Apr. 2011. doi: 10.1109/TAC.2011.2108370
|
| [28] |
N. Bu, H. Liu, and W. Li, “Robust passive tracking control for an uncertain soft actuator using robust right coprime factorization,” Int. J. Robust Nonlinear Control, vol. 31, no. 14, pp. 6810–6825, Sep. 2021. doi: 10.1002/rnc.5645
|
| [29] |
T. Usami and M. Deng, “Applying an MSVR method to forecast a three-degree-of-freedom soft actuator for a nonlinear position control system: Simulation and experiments,” IEEE Syst. Man Cybern. Mag., vol. 8, no. 3, pp. 61–69, Jul. 2022. doi: 10.1109/MSMC.2022.3153747
|
| [30] |
D. Youla and J. Bongiorno, “A feedback theory of two-degree-of-freedom optimal Wiener-Hopf design,” IEEE Trans. Automat. Contr., vol. 30, no. 7, pp. 652–665, Jul. 1985. doi: 10.1109/TAC.1985.1104023
|
| [31] |
P. J. Campo, M. Morari, and C. N. Nett, “Multivariable anti-windup and bumpless transfer: A general theory,” in Proc. American Control Conf., Pittsburgh, PA, USA, 1989, pp. 1706–1711.
|
| [32] |
J. Gasser, A Boole Anthology: Recent and Classical Studies in the Logic of George Boole. Dordrecht, Netherlands: Springer, 2000.
|
Figures(20) / Tables(2)






 DownLoad:
DownLoad: