A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 8
Volume 11
Issue 8
IEEE/CAA Journal of Automatica Sinica
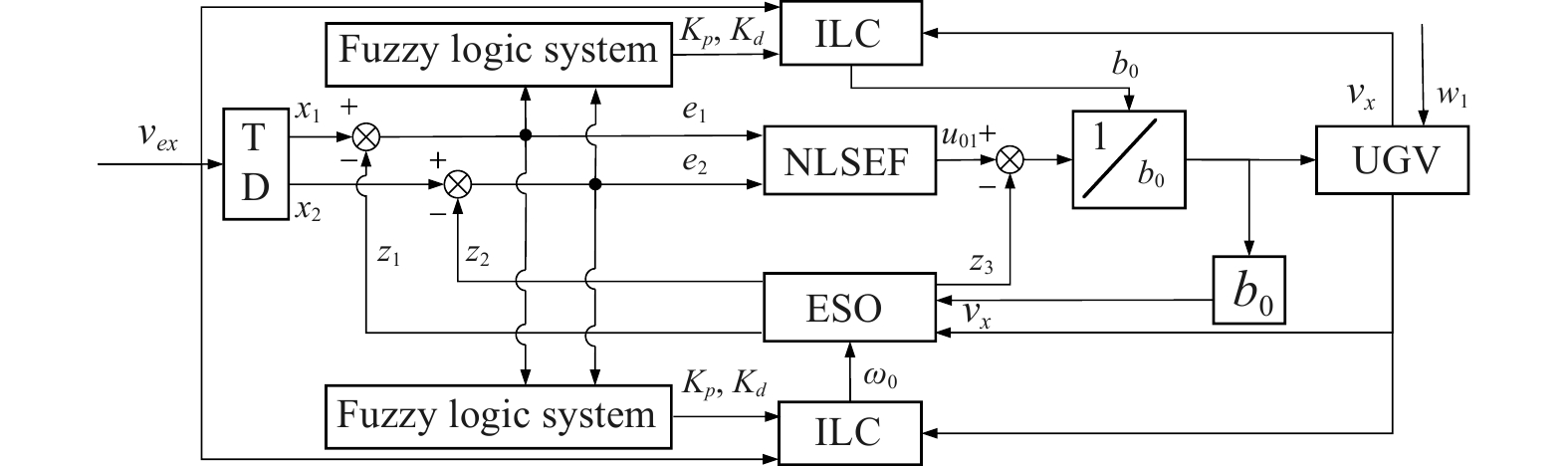
| Citation: | T. Chen, R. Zhao, J. Chen, and Z. Zhang, “Data-driven active disturbance rejection control of plant-protection unmanned ground vehicle prototype: A fuzzy indirect iterative learning approach,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 8, pp. 1892–1894, Aug. 2024. doi: 10.1109/JAS.2023.124158

|

| [1] |
H. Wang, T. Zhang, X. Zhang, and Q. Li, “Observer-based path tracking controller design for autonomous ground vehicles with input saturation,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 749–761, 2023. doi: 10.1109/JAS.2023.123078
|
| [2] |
Z.-H. Pang, B. Ma, G.-P. Liu, and Q.-L. Han, “Data-driven adaptive control: An incremental triangular dynamic linearization approach,” IEEE Trans. Circuits and Systems II: Express Briefs, vol. 69, no. 12, pp. 4949–4953, 2022.
|
| [3] |
R.-E. Precup, R.-C. Roman, and A. Safaei, Data-Driven Model-Free Controllers. Boca Raton, USA: CRC Press, 2021.
|
| [4] |
J. Han, “From PID to active disturbance rejection control,” IEEE Trans. Industrial Electronics, vol. 56, no. 3, pp. 900–906, 2009. doi: 10.1109/TIE.2008.2011621
|
| [5] |
H. Wang, Z. Zuo, Y. Wang, H. Yang, and C. Hu, “Longitudinal velocity regulation of UGVs: A composite control approach for acceleration and deceleration,” IEEE Trans. Intelligent Transportation Systems, vol. 24, no. 10, pp. 11096–11106, 2023.
|
| [6] |
S. Wang, J. Chen, and X. He, “An adaptive composite disturbance rejection for attitude control of the agricultural quadrotor UAV,” ISA Trans., vol. 129, pp. 564–579, 2022. doi: 10.1016/j.isatra.2022.01.012
|
| [7] |
K. He, C. Dong, and Q. Wang, “Active disturbance rejection control for uncertain nonlinear systems with sporadic measurements,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 893–906, 2022. doi: 10.1109/JAS.2022.105566
|
| [8] |
J. Li, X. Qi, H. Wan, and Y. Xia, “Active disturbance rejection control: Theoretical results summary and future researches,” Control Theory &Applications, vol. 34, no. 3, pp. 281–295, 2017.
|
| [9] |
O. Castillo, H. Neyoy, J. Soria, P. Melin, and F. Valdez, “A new approach for dynamic fuzzy logic parameter tuning in ant colony optimization and its application in fuzzy control of a mobile robot,” Applied Soft Computing, vol. 28, pp. 150–159, 2015. doi: 10.1016/j.asoc.2014.12.002
|
| [10] |
W. Chang, Y. Li, and S. Tong, “Adaptive fuzzy backstepping tracking control for flexible robotic manipulator,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 12, pp. 1923–1930, 2021. doi: 10.1109/JAS.2017.7510886
|
| [11] |
T. Wu, Z. Yu, and S. Li, “Observer-based adaptive fuzzy quantized fault-tolerant control of nonstrict-feedback nonlinear systems with sensor fault,” IEEE Trans. Fuzzy Systems, vol. 31, no. 6, pp. 1900–1911, 2023. doi: 10.1109/TFUZZ.2022.3216113
|
| [12] |
M. Van, Y. Sun, S. Mcllvanna, M.-N. Nguyen, M. O. Khyam, and D. Ceglarek, “Adaptive fuzzy fault tolerant control for robot manipulators with fixed-time convergence,” IEEE Trans. Fuzzy Systems, vol. 31, no. 9, pp. 3210–3219, 2023. doi: 10.1109/TFUZZ.2023.3247693
|
| [13] |
Y. Sun, J. Liu, Y. Gao, Z. Liu, and Y. Zhao, “Adaptive neural tracking control for manipulators with prescribed performance under input saturation,” IEEE/ASME Trans. Mechatronics, vol. 28, no. 2, pp. 1037–1046, 2023. doi: 10.1109/TMECH.2022.3213441
|
| [14] |
Z. Liu, O. Zhang, Y. Gao, Y. Zhao, Y. Sun, and J. Liu, “Adaptive neural network-based fixed-time control for trajectory tracking of robotic systems,” IEEE Trans. Circuits and Systems II: Express Briefs, vol. 70, no. 1, pp. 241–245, 2023.
|
| [15] |
S. Preitl, R.-E. Precup, J. Fodor, and B. Bede, “Iterative feedback tuning in fuzzy control systems. theory and applications,” Acta Polytechnica Hungarica, vol. 3, no. 3, pp. 81–96, 2006.
|
| [16] |
R.-C. Roman, R.-E. Precup, E.-L. Hedrea, S. Preitl, I. A. Zamfirache, C.-A. Bojan-Dragos, and E. M. Petriu, “Iterative feedback tuning algorithm for tower crane systems,” Procedia Computer Science, vol. 199, pp. 157–165, 2022. doi: 10.1016/j.procs.2022.01.020
|
| [17] |
Q. Zheng, L. Q. Gaol, and Z. Gao, “On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics,” in Proc. 46th IEEE Conf. Decision and Control, 2007, pp. 3501–3506.
|
| [18] |
X. Li, S. Tian, and W. Ai, “Active disturbance rejection based iterative learning control,” in Proc. Chinese Control and Decision Conf., 2016, pp. 6645–6650.
|
Figures(5)






 DownLoad:
DownLoad: