A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 2
Volume 11
Issue 2
IEEE/CAA Journal of Automatica Sinica
| Citation: | Y. Tong, H. Liu, and Z. Zhang, “Advancements in humanoid robots: A comprehensive review and future prospects,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 301–328, Feb. 2024. doi: 10.1109/JAS.2023.124140

|
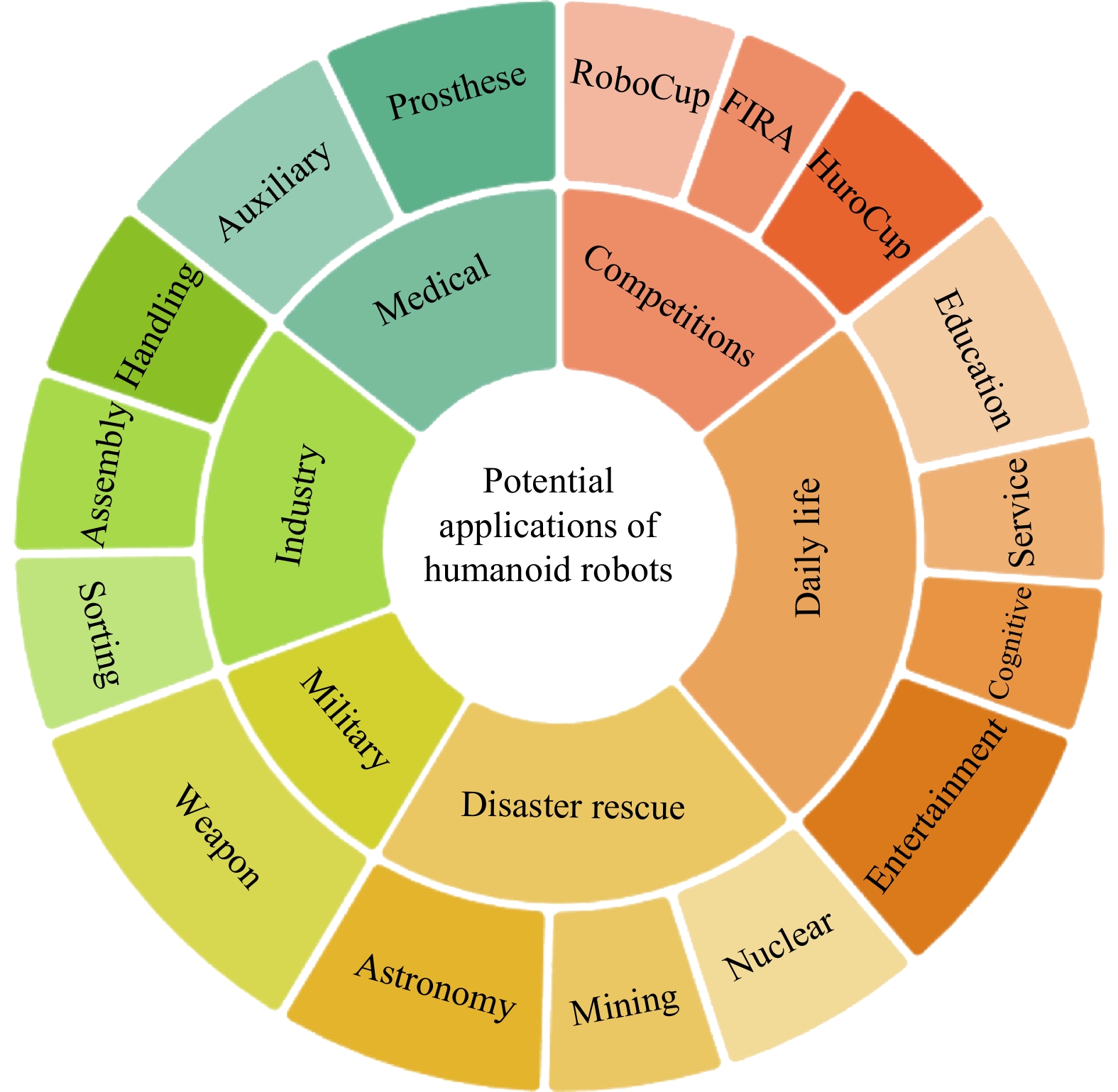
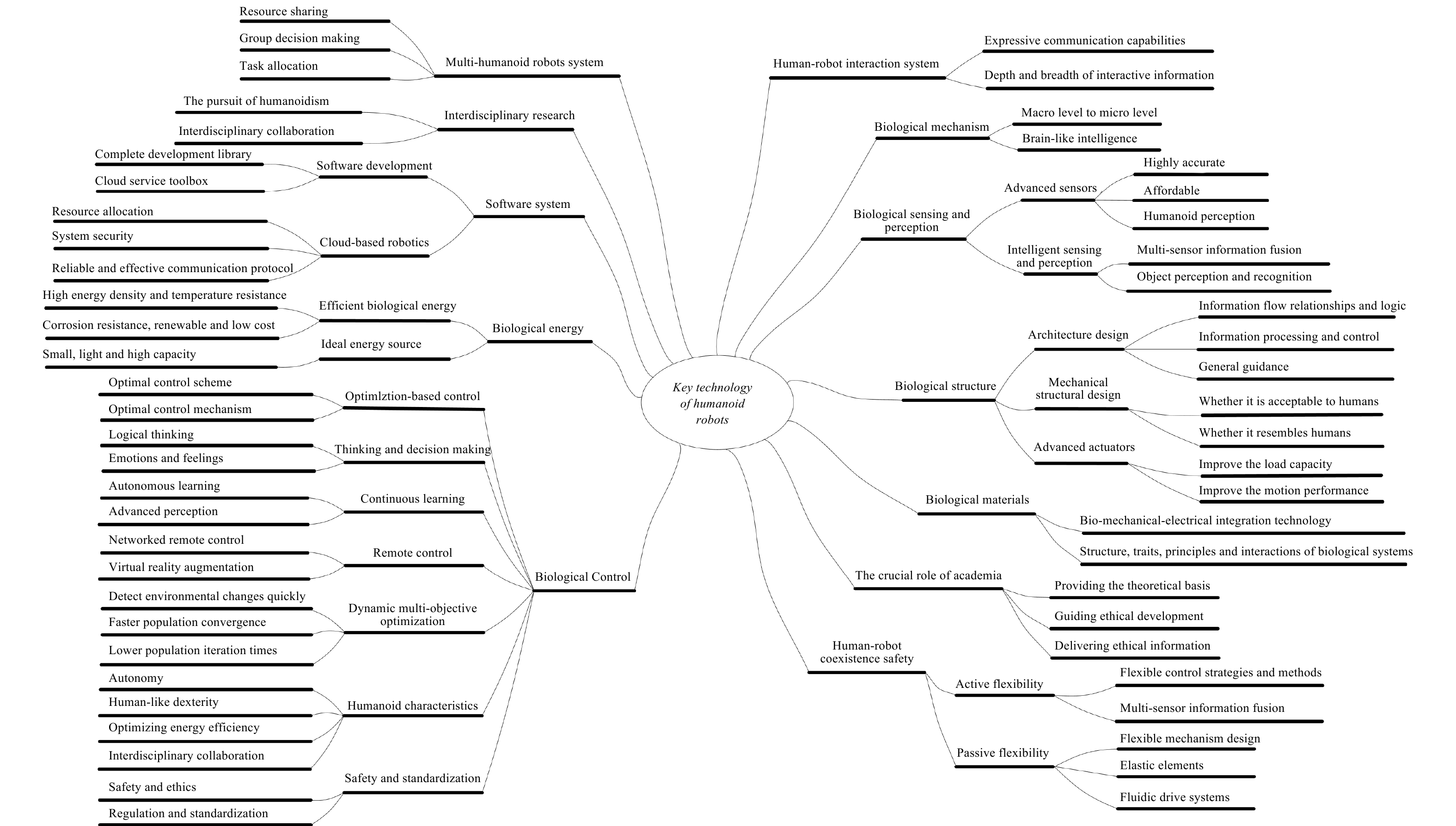
This paper provides a comprehensive review of the current status, advancements, and future prospects of humanoid robots, highlighting their significance in driving the evolution of next-generation industries. By analyzing various research endeavors and key technologies, encompassing ontology structure, control and decision-making, and perception and interaction, a holistic overview of the current state of humanoid robot research is presented. Furthermore, emerging challenges in the field are identified, emphasizing the necessity for a deeper understanding of biological motion mechanisms, improved structural design, enhanced material applications, advanced drive and control methods, and efficient energy utilization. The integration of bionics, brain-inspired intelligence, mechanics, and control is underscored as a promising direction for the development of advanced humanoid robotic systems. This paper serves as an invaluable resource, offering insightful guidance to researchers in the field, while contributing to the ongoing evolution and potential of humanoid robots across diverse domains.

| [1] |
G.-Z. Yang, “Robot learning-Beyond imitation,” Sci. Robot., vol. 4, no. 26, p. eaaw3520, Jan. 2019. doi: 10.1126/scirobotics.aaw3520
|
| [2] |
R. Baines, S. K. Patiballa, J. Booth, L. Ramirez, T. Sipple, A. Garcia, F. Fish, and R. Kramer-Bottiglio, “Multi-environment robotic transitions through adaptive morphogenesis,” Nature, vol. 610, no. 7931, pp. 283–289, Oct. 2022. doi: 10.1038/s41586-022-05188-w
|
| [3] |
A. Vishwanath, A. Singh, Y. H. V. Chua, J. Dauwels, and N. Magnenat-Thalmann, “Humanoid co-workers: How is it like to work with a robot?” in Proc. 28th IEEE Int. Conf. Robot and Human Interactive Communication, New Delhi, India, 2019, pp. 1–6.
|
| [4] |
J. Cui and J. Trinkle, “Toward next-generation learned robot manipulation,” Sci. Robot., vol. 6, no. 54, p. eabd9461, May 2021. doi: 10.1126/scirobotics.abd9461
|
| [5] |
F. Yuan, M. Boltz, D. Bilal, Y.-L. Jao, M. Crane, J. Duzan, A. Bahour, and X. Zhao, “Cognitive exercise for persons with Alzheimer’s disease and related dementia using a social robot,” IEEE Trans. Robot., vol. 39, no. 4, pp. 3332–3346, 2023. doi: 10.1109/TRO.2023.3272846
|
| [6] |
I. Chavdarov, K. Yovchev, L. Miteva, A. Stefanov, and D. Nedanovski, “A strategy for controlling motions related to sensory information in a walking robot big foot,” Sensors, vol. 23, no. 3, p. 1506, Jan. 2023. doi: 10.3390/s23031506
|
| [7] |
F. Gama, M. Shcherban, M. Rolf, and M. Hoffmann, “Goal-directed tactile exploration for body model learning through self-touch on a humanoid robot,” IEEE Trans. Cogn. Dev. Syst., vol. 15, no. 2, pp. 419–433, Jun. 2023. doi: 10.1109/TCDS.2021.3104881
|
| [8] |
T. Hara, T. Sato, T. Ogata, and H. Awano, “Uncertainty-aware haptic shared control with humanoid robots for flexible object manipulation,” IEEE Robot. Autom. Lett., vol. 8, no. 10, pp. 6435–6442, Oct. 2023. doi: 10.1109/LRA.2023.3306668
|
| [9] |
S. Saeedvand, M. Jafari, H. S. Aghdasi, and J. Baltes, “A comprehensive survey on humanoid robot development,” Knowl. Eng. Rev., vol. 34, p. e20, Dec. 2019. doi: 10.1017/S0269888919000158
|
| [10] |
F. Rubio, F. Valero, and C. Llopis-Albert, “A review of mobile robots: Concepts, methods, theoretical framework, and applications,” Int. J. Adv. Robot. Syst., vol. 16, no. 2, Apr. 2019.
|
| [11] |
C. Tsiourti, A. Weiss, K. Wac, and M. Vincze, “Multimodal integration of emotional signals from voice, body, and context: Effects of (in) congruence on emotion recognition and attitudes towards robots,” Int. J. Soc. Robot., vol. 11, no. 4, pp. 555–573, Feb. 2019. doi: 10.1007/s12369-019-00524-z
|
| [12] |
A. Goswami and P. Vadakkepat, Humanoid Robotics: A Reference. Dordrecht, The Netherlands: Springer, 2019.
|
| [13] |
B. Siciliano and O. Khatib, Springer Handbook of Robotics. 2nd ed. Cham, Germany: Springer, 2016.
|
| [14] |
J. Merel, M. Botvinick, and G. Wayne, “Hierarchical motor control in mammals and machines,” Nat. Commun., vol. 10, no. 1, p. 5489, Dec. 2019. doi: 10.1038/s41467-019-13239-6
|
| [15] |
S. Sathyavenkateshwaren and S. Malathi, “Humanoid robot: A survey on communication, tracking and voice recognition,” in Proc. 3rd Int. Conf. Inventive Computation Technologies, Coimbatore, India, 2018, pp. 555–560.
|
| [16] |
G. Taga, Y. Yamaguchi, and H. Shimizu, “Self-organized control of bipedal locomotion by neural oscillators in unpredictable environment,” Biol. Cybern., vol. 65, no. 3, pp. 147–159, Jul. 1991. doi: 10.1007/BF00198086
|
| [17] |
G. Taga, “Global entrainment in the brain-body-environment: Retrospective and prospective views,” Biol. Cybern., vol. 115, no. 5, pp. 431–438, Oct. 2021. doi: 10.1007/s00422-021-00898-2
|
| [18] |
T. Reil and P. Husbands, “Evolution of central pattern generators for bipedal walking in a real-time physics environment,” IEEE Trans. Evol. Computat., vol. 6, no. 2, pp. 159–168, Apr. 2002. doi: 10.1109/4235.996015
|
| [19] |
W. Huang, C.-M. Chew, Y. Zheng, and G.-S. Hong, “Pattern generation for bipedal walking on slopes and stairs,” in Proc. 8th IEEE-RAS Int. Conf. Humanoid Robots, Daejeon, South Korea, 2008, pp. 155–160.
|
| [20] |
J. M. Wang, D. J. Fleet, and A. Hertzmann, “Optimizing walking controllers for uncertain inputs and environments,” ACM Trans. Graph., vol. 29, no. 4, p. 73, Jul. 2010.
|
| [21] |
J. R. Jeffers, A. G. Auyang, and A. M. Grabowski, “The correlation between metabolic and individual leg mechanical power during walking at different slopes and velocities,” J. Biomech., vol. 48, no. 11, pp. 2919–2924, Aug. 2015. doi: 10.1016/j.jbiomech.2015.04.023
|
| [22] |
S. Wang, W. Chaovalitwongse, and R. Babuska, “Machine learning algorithms in bipedal robot control,” IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.), vol. 42, no. 5, pp. 728–743, Sept. 2012. doi: 10.1109/TSMCC.2012.2186565
|
| [23] |
A. G. Di Nuovo, D. Marocco, S. Di Nuovo, and A. Cangelosi, “Autonomous learning in humanoid robotics through mental imagery,” Neural Netw., vol. 41, pp. 147–155, May 2013. doi: 10.1016/j.neunet.2012.09.019
|
| [24] |
M. Jafari, S. Saeedvand, and H. S. Aghdasi, “A hybrid Q-learning algorithm to score a moving ball for humanoid robots,” in Proc. 5th IEEE Conf. Knowledge Based Engineering and Innovation, Tehran, Iran, 2019, pp. 498–503.
|
| [25] |
T. Sugihara and M. Morisawa, “A survey: Dynamics of humanoid robots,” Adv. Robot., vol. 34, no. 21–22, pp. 1338–1352, Jun. 2020. doi: 10.1080/01691864.2020.1778524
|
| [26] |
Y. Tazaki and M. Murooka, “A survey of motion planning techniques for humanoid robots,” Adv. Robot., vol. 34, no. 21–22, pp. 1370–1379, Aug. 2020. doi: 10.1080/01691864.2020.1803128
|
| [27] |
M. Destephe, A. Henning, M. Zecca, K. Hashimoto, and A. Takanishi, “Perception of emotion and emotional intensity in humanoid robots gait,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, Shenzhen, China, 2013, pp. 1276–1281.
|
| [28] |
J. J. Steil, F. Röthling, R. Haschke, and H. Ritter, “Situated robot learning for multi-modal instruction and imitation of grasping,” Robot. Auton. Syst., vol. 47, no. 2-3, pp. 129–141, Jun. 2004. doi: 10.1016/j.robot.2004.03.007
|
| [29] |
G. McCartney and A. McCartney, “Rise of the machines: Towards a conceptual service-robot research framework for the hospitality and tourism industry,” Int. J. Contemp. Hospitality Manage., vol. 13, no. 12, pp. 3835–3851, Dec. 2020.
|
| [30] |
K. Darvish, L. Penco, J. Ramos, R. Cisneros, J. Pratt, E. Yoshida, S. Ivaldi, and D. Pucci, “Teleoperation of humanoid robots: A survey,” IEEE Trans. Robot., vol. 39, no. 3, pp. 1706–1727, Jun. 2023. doi: 10.1109/TRO.2023.3236952
|
| [31] |
H. Hemami and B.-R. Chen, “Stability analysis and input design of a two-link planar biped,” Int. J. Robot. Res., vol. 3, no. 2, pp. 93–100, Jun. 1984. doi: 10.1177/027836498400300208
|
| [32] |
L. Li, Z. Xie, and X. Luo, “Impact dynamics and parametric analysis of planar biped robot,” in Proc. 25th Int. Conf. Mechatronics and Machine Vision in Practice, Stuttgart, Germany, 2018, pp. 97–102.
|
| [33] |
R. Ozawa and Y. Kojima, “Control of a powered planar biped without ankle actuation,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Taipei, China, 2010, pp. 3617–3622.
|
| [34] |
J. P. Schmiedeler, E. R. Westervelt, and A. R. Dunki-Jacobs, “Integrated design and control of a biped robot,” in Proc. Int. Design Engineering Technical Conf. Computers and Information in Engineering Conf., Long Beach, USA, 2005, pp. 167–173.
|
| [35] |
M. Hirose and K. Ogawa, “Honda humanoid robots development,” Phil. Trans. Roy. Soc. A: Math. Phys. Eng. Sci., vol. 365, no. 1850, pp. 11–19, Jan. 2007.
|
| [36] |
T. Ishida, “Development of a small biped entertainment robot QRIO,” in Proc. Micro-NanoMechatronics and Human Science and 4th Symp. Micro-Nanomechatronics for Information-Based Society, Nagoya, Japan, 2004, pp. 23–28.
|
| [37] |
C. Azevedo, “Control architecture and algorithms of the anthropomorphic biped robot-BIP2000,” in Proc. 3rd Int. Conf. Climbing and Walking Robots, London, UK, 2000, pp. 285–293.
|
| [38] |
M. Fujita, Y. Kuroki, T. Ishida, and T. T. Doi, “A small humanoid robot SDR-4X for entertainment applications,” in Proc. IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics, Kobe, Japan, 2003, pp. 938–943.
|
| [39] |
J.-H. Oh, D. Hanson, W.-S. Kim, Y. Han, J.-Y. Kim, and I.-W. Park, “Design of android type humanoid robot Albert HUBO,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Beijing, China, 2006, pp. 1428–1433.
|
| [40] |
Y. Sakagami, R. Watanabe, C. Aoyama, S. Matsunaga, N. Higaki, and K. Fujimura, “The intelligent ASIMO: System overview and integration,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Lausanne, Switzerland, 2002, pp. 2478–2483.
|
| [41] |
A. De Santis, B. Siciliano, A. De Luca, and A. Bicchi, “An atlas of physical human-robot interaction,” Mech. Mach. Theory, vol. 43, no. 3, pp. 253–270, Mar. 2008. doi: 10.1016/j.mechmachtheory.2007.03.003
|
| [42] |
S. Kuindersma, R. Deits, M. Fallon, A. Valenzuela, H. Dai, F. Permenter, T. Koolen, P. Marion, and R. Tedrake, “Optimization-based locomotion planning, estimation, and control design for the Atlas humanoid robot,” Auton. Robot., vol. 40, no. 3, pp. 429–455, Mar. 2016. doi: 10.1007/s10514-015-9479-3
|
| [43] |
K. Khokar, P. Beeson, and R. Burridge, “Implementation of KDL inverse kinematics routine on the Atlas humanoid robot,” Proc. Comput. Sci., vol. 46, pp. 1441–1448, Dec. 2015. doi: 10.1016/j.procs.2015.02.063
|
| [44] |
G. Nelson, A. Saunders, N. Neville, B. Swilling, J. Bondaryk, D. Billings, C. Lee, R. Playter, and M. Raibert, “PETMAN: A humanoid robot for testing chemical protective clothing,” J. Robot. Soc. Japan, vol. 30, no. 4, pp. 372–377, May 2012. doi: 10.7210/jrsj.30.372
|
| [45] |
S. Sakai and Y. Maeshima, “A new method for parameter identification for N-DOF hydraulic robots,” in Proc. IEEE Int. Conf. Robotics and Automation, Hong Kong, China, 2014, pp. 5983–5989.
|
| [46] |
J. Banks, “Optimus primed: Media cultivation of robot mental models and social judgments,” Front. Robot. AI, vol. 7, p. 62, May 2020. doi: 10.3389/frobt.2020.00062
|
| [47] |
X. Shu, F. Ni, X. Fan, S. Yang, C. Liu, B. Tu, Y. Liu, and H. Liu, “A versatile humanoid robot platform for dexterous manipulation and human-robot collaboration,” CAAI Trans. Intell. Technol., 2023. DOI: 10.1049/cit2.12214
|
| [48] |
H. Qiao, J. Chen, and X. Huang, “A survey of brain-inspired intelligent robots: Integration of vision, decision, motion control, and musculoskeletal systems,” IEEE Trans. Cybern., vol. 52, no. 10, pp. 11267–11280, Oct. 2022. doi: 10.1109/TCYB.2021.3071312
|
| [49] |
H. Qiao, Y.-X. Wu, S.-L. Zhong, P.-J. Yin, and J.-H. Chen, “Brain-inspired intelligent robotics: Theoretical analysis and systematic application,” Mach. Intell. Res., vol. 20, no. 1, pp. 1–18, Jan. 2023. doi: 10.1007/s11633-022-1390-8
|
| [50] |
Q. Huang, C. Dong, Z. Yu, X. Chen, Q. Li, H. Chen, and H. Liu, “Resistant compliance control for biped robot inspired by humanlike behavior,” IEEE/ASME Trans. Mechatron., vol. 27, no. 5, pp. 3463–3473, Oct. 2022. doi: 10.1109/TMECH.2021.3139332
|
| [51] |
G. Metta, L. Natale, F. Nori, G. Sandini, D. Vernon, L. Fadiga, C. von Hofsten, K. Rosander, M. Lopes, J. Santos-Victor, A. Bernardino, and L. Montesano, “The iCub humanoid robot: An open-systems platform for research in cognitive development,” Neural Netw., vol. 23, no. 8–9, pp. 1125–1134, Oct.–Nov. 2010. doi: 10.1016/j.neunet.2010.08.010
|
| [52] |
N. G. Tsagarakis, G. Metta, G. Sandini, D. Vernon, R. Beira, F. Becchi, L. Righetti, J. Santos-Victor, A. J. Ijspeert, M. C. Carrozza, and D. G. Caldwell, “iCub: The design and realization of an open humanoid platform for cognitive and neuroscience research,” Adv. Robot., vol. 21, no. 10, pp. 1151–1175, Oct. 2007. doi: 10.1163/156855307781389419
|
| [53] |
C. Fu and K. Chen, “Gait synthesis and sensory control of stair climbing for a humanoid robot,” IEEE Trans. Ind. Electron., vol. 55, no. 5, pp. 2111–2120, May 2008. doi: 10.1109/TIE.2008.921205
|
| [54] |
S. Caron, A. Escande, L. Lanari, and B. Mallein, “Capturability-based pattern generation for walking with variable height,” IEEE Trans. Robot., vol. 36, no. 2, pp. 517–536, Apr. 2020. doi: 10.1109/TRO.2019.2923971
|
| [55] |
T. Koolen, T. de Boer, J. Rebula, A. Goswami, and J. Pratt, “Capturability-based analysis and control of legged locomotion, Part 1: Theory and application to three simple gait models,” Int. J. Robot. Res., vol. 31, no. 9, pp. 1094–1113, Jul. 2012. doi: 10.1177/0278364912452673
|
| [56] |
M. Thor, T. Kulvicius, and P. Manoonpong, “Generic neural locomotion control framework for legged robots,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 9, pp. 4013–4025, Sept. 2021. doi: 10.1109/TNNLS.2020.3016523
|
| [57] |
F. Zhang and Y. Demiris, “Learning garment manipulation policies toward robot-assisted dressing,” Sci. Robot., vol. 7, no. 65, p. eabm6010, Apr. 2022. doi: 10.1126/scirobotics.abm6010
|
| [58] |
J. Silvério, S. Calinon, L. Rozo, and D. G. Caldwell, “Learning task priorities from demonstrations,” IEEE Trans. Robot., vol. 35, no. 1, pp. 78–94, Feb. 2019. doi: 10.1109/TRO.2018.2878355
|
| [59] |
Z. Li, K. Zhao, L. Zhang, X. Wu, T. Zhang, Q. Li, X. Li, and C.-Y. Su, “Human-in-the-loop control of a wearable lower limb exoskeleton for stable dynamic walking,” IEEE/ASME Trans. Mechatron., vol. 26, no. 5, pp. 2700–2711, Oct. 2021. doi: 10.1109/TMECH.2020.3044289
|
| [60] |
X. Wu and Z. Li, “Cooperative manipulation of wearable dual-arm exoskeletons using force communication between partners,” IEEE Trans. Ind. Electron., vol. 67, no. 8, pp. 6629–6638, Aug. 2020. doi: 10.1109/TIE.2019.2937036
|
| [61] |
G. Li, Z. Li, and Z. Kan, “Assimilation control of a robotic exoskeleton for physical human-robot interaction,” IEEE Robot. Autom. Lett., vol. 7, no. 2, pp. 2977–2984, Apr. 2022. doi: 10.1109/LRA.2022.3144537
|
| [62] |
Y. Kusuda, “The humanoid robot scene in Japan,” Ind. Robot, vol. 29, no. 5, pp. 412–419, Oct. 2002. doi: 10.1108/01439910210440219
|
| [63] |
H. Niwa, K. Kodaka, Y. Sakamoto, M. Otake, S. Kawaguchi, K. Fujii, Y. Kanemori, and S. Sugano, “GPS-based indoor positioning system with multi-channel pseudolite,” in Proc. IEEE Int. Conf. Robotics and Automation, Pasadena, USA, 2008, pp. 905–910.
|
| [64] |
S. Sugano and Y. Shirai, “Robot design and environment design – Waseda robot-house project,” in Proc. SICE-ICASE Int. Joint Conf., Busan, South Korea, 2006, pp. I-31–I-34.
|
| [65] |
Y. Ogura, H. Aikawa, K. Shimomura, H. Kondo, A. Morishima, H.-O. Lim, and A. Takanishi, “Development of a new humanoid robot WABIAN-2,” in Proc. IEEE Int. Conf. Robotics and Automation, Orlando, USA, 2006, pp. 76–81.
|
| [66] |
K. Kaneko, F. Kanehiro, S. Kajita, H. Hirukawa, T. Kawasaki, M. Hirata, K. Akachi, and T. Isozumi, “Humanoid robot HRP-2,” in Proc. IEEE Int. Conf. Robotics and Automation, New Orleans, USA, 2004, pp. 1083–1090.
|
| [67] |
S. Caron, A. Kheddar, and O. Tempier, “Stair climbing stabilization of the HRP-4 humanoid robot using whole-body admittance control,” in Proc. IEEE Int. Conf. Robotics and Automation, Montreal, Canada, 2019, pp. 277–283.
|
| [68] |
S. Kajita, K. Kaneko, F. Kaneiro, K. Harada, M. Morisawa, S. Nakaoka, K. Miura, K. Fujiwara, E. S. Neo, I. Hara, K. Yokoi, and H. Hirukawa, “Cybernetic human HRP-4C: A humanoid robot with human-like proportions,” in Robotics Research: The 14th International Symposium ISRR, C. Pradalier, R. Siegwart, and G. Hirzinger, Eds. Berlin, Heidelberg, Germany: Springer, 2011, pp. 301–314.
|
| [69] |
K. Kaneko, H. Kaminaga, T. Sakaguchi, S. Kajita, M. Morisawa, I. Kumagai, and F. Kanehiro, “Humanoid robot HRP-5P: An electrically actuated humanoid robot with high-power and wide-range joints,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 1431–1438, Apr. 2019. doi: 10.1109/LRA.2019.2896465
|
| [70] |
T. Kozuki, H. Mizoguchi, Y. Asano, M. Osada, T. Shirai, U. Junichi, Y. Nakanishi, K. Okada, and M. Inaba, “Design methodology for the thorax and shoulder of human mimetic musculoskeletal humanoid Kenshiro –A thorax structure with Rib like surface–,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 2012, pp. 3687–3692.
|
| [71] |
T. Kozuki, Y. Motegi, T. Shirai, Y. Asano, J. Urata, Y. Nakanishi, K. Okada, and M. Inaba, “Design of upper limb by adhesion of muscles and bones–Detail human mimetic musculoskeletal humanoid Kenshiro,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Tokyo, Japan, 2013, pp. 935–940.
|
| [72] |
Y. Nakanishi, Y. Asano, T. Kozuki, H. Mizoguchi, Y. Motegi, M. Osada, T. Shirai, J. Urata, K. Okada, and M. Inaba, “Design concept of detail musculoskeletal humanoid ”Kenshiro”–Toward a real human body musculoskeletal simulator,” in Proc. 12th IEEE-RAS Int. Conf. Humanoid Robots, Osaka, Japan, 2012, pp. 1–6.
|
| [73] |
T. Takenaka, “The control system for the Honda humanoid robot,” Age Ageing, vol. 35, no. S2, pp. ii24–ii26, Sept. 2006.
|
| [74] |
K. Hirai, M. Hirose, Y. Haikawa, and T. Takenaka, “The development of Honda humanoid robot,” in Proc. IEEE Int. Conf. Robotics and Automation, Leuven, Belgium, 1998, pp. 1321–1326.
|
| [75] |
K. Hirai, “The Honda humanoid robot: Development and future perspective,” Ind. Robot, vol. 26, no. 4, pp. 260–266, Jun. 1999. doi: 10.1108/01439919910277431
|
| [76] |
J. Chestnutt, M. Lau, G. Cheung, J. Kuffner, J. Hodgins, and T. Kanade, “Footstep planning for the Honda ASIMO humanoid,” in Proc. IEEE Int. Conf. Robotics and Automation, Barcelona, Spain, 2005, pp. 629–634.
|
| [77] |
A. Austermann, S. Yamada, K. Funakoshi, and M. Nakano, “Similarities and differences in users’ interaction with a humanoid and a pet robot,” in Proc. 5th ACM/IEEE Int. Conf. Human-Robot Interaction, Osaka, Japan, 2010, pp. 73–74.
|
| [78] |
J. Chestnutt, P. Michel, J. Kuffner, and T. Kanade, “Locomotion among dynamic obstacles for the Honda ASIMO,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, San Diego, USA, 2007, pp. 2578–2579.
|
| [79] |
V. Ng-Thow-Hing, J. Lim, J. Wormer, R. K. Sarvadevabhatla, C. Rocha, K. Fujimura, and Y. Sakagami, “The memory game: Creating a human-robot interactive scenario for ASIMO,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Nice, France, 2008, pp. 779–786.
|
| [80] |
S. Y. Okita, V. Ng-Thow-Hing, and R. Sarvadevabhatla, “Learning together: ASIMO developing an interactive learning partnership with children,” in Proc. 18th IEEE Int. Symp. Robot and Human Interactive Communication, Toyama, Japan, 2009, pp. 1125–1130.
|
| [81] |
S.-G. Roh, K. W. Yang, J. H. Park, H. Moon, H.-S. Kim, H. Lee, and H. R. Choi, “A modularized personal robot DRP I: Design and implementation,” IEEE Trans. Robot., vol. 25, no. 2, pp. 414–425, Apr. 2009. doi: 10.1109/TRO.2009.2014499
|
| [82] |
M. A. Diffler, E. L. Huber, C. J. Culbert, R. O. Ambrose, and W. J. Bluethmann, “Human-robot control strategies for the NASA/DARPA Robonaut,” in Proc. IEEE Aerospace Conf., Big Sky, USA, 2003, pp. 3939–3947.
|
| [83] |
M. A. Diftler, C. J. Culbert, R. O. Ambrose, R. Platt, and W. J. Bluethmann, “Evolution of the NASA/DARPA Robonaut control system,” in Proc. IEEE Int. Conf. Robotics and Automation, Taipei, China, 2003, pp. 2543–2548.
|
| [84] |
M. A. Diftler, J. S. Mehling, M. E. Abdallah, N. A. Radford, L. B. Bridgwater, A. M. Sanders, R. S. Askew, D. M. Linn, J. D. Yamokoski, F. A. Permenter, B. K. Hargrave, R. Platt, R. T. Savely, and R. O. Ambrose, “Robonaut 2–The first humanoid robot in space,” in IEEE Proc. Int. Conf. Robotics and Automation, Shanghai, China, 2011, pp. 2178–2183.
|
| [85] |
W. Bluethmann, R. Ambrose, M. Diftler, S. Askew, E. Huber, M. Goza, F. Rehnmark, C. Lovchik, and D. Magruder, “Robonaut: A robot designed to work with humans in space,” Auton. Robot., vol. 14, no. 2-3, pp. 179–197, Mar. 2003.
|
| [86] |
G. Engelberger, “NASA’s robonaut,” Ind. Robot, vol. 28, no. 1, pp. 35–42, Feb. 2001. doi: 10.1108/01439910110380433
|
| [87] |
Z. Li, C. Cummings, and K. Sreenath, “Animated Cassie: A dynamic relatable robotic character,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Las Vegas, USA, 2020, pp. 3739–3746.
|
| [88] |
Y. Gong, R. Hartley, X. Da, A. Hereid, O. Harib, J.-K. Huang, and J. Grizzle, “Feedback control of a Cassie bipedal robot: Walking, standing, and riding a Segway,” in Proc. American Control Conf., Philadelphia, USA, 2019, pp. 4559–4566.
|
| [89] |
N. T. Fitter and K. J. Kuchenbecker, “Designing and assessing expressive open-source faces for the Baxter robot,” in Proc. 8th Int. Conf. Social Robotics, Kansas City, USA, 2016, pp. 340–350.
|
| [90] |
Y. Huang, X. Zhang, X. Chen, and J. Ota, “Vision-guided peg-in-hole assembly by Baxter robot,” Adv. Mech. Eng., vol. 9, no. 12, Dec. 2017.
|
| [91] |
Z. Ju, C. Yang, and H. Ma, “Kinematics modeling and experimental verification of Baxter robot,” in Proc. 33rd Chinese Control Conf., Nanjing, China, 2014, pp. 8518–8523.
|
| [92] |
L. A. Nguyen, K. D. Le, and T. L. Harman, “Kinematic redundancy resolution for Baxter robot,” in Proc. 7th Int. Conf. Automation, Robotics and Applications, Prague, Czech Republic, 2021, pp. 6–9.
|
| [93] |
J. Pratt, T. Koolen, T. de Boer, J. Rebula, S. Cotton, J. Carff, M. Johnson, and P. Neuhaus, “Capturability-based analysis and control of legged locomotion, Part 2: Application to M2V2, a lower-body humanoid,” Int. J. Robot. Res., vol. 31, no. 10, pp. 1117–1133, Aug. 2012. doi: 10.1177/0278364912452762
|
| [94] |
J. Pratt and B. Krupp, “Design of a bipedal walking robot,” in Proc. SPIE 6962, Unmanned Systems Technology X, Orlando, USA, 2008, pp. 69621F.
|
| [95] |
J. M. Garcia-Haro, E. D. Oña, J. Hernandez-Vicen, S. Martinez, and C. Balaguer, “Service robots in catering applications: A review and future challenges,” Electronics, vol. 10, no. 1, p. 47, Jan. 2021.
|
| [96] |
M. Fallon, “Perception and estimation challenges for humanoid robotics: DARPA robotics challenge and NASA Valkyrie,” in Proc. SPIE 9986, Unmanned/Unattended Sensors and Sensor Networks XII, Edinburgh, UK, 2016, pp. 998602.
|
| [97] |
M. Johnson, B. Shrewsbury, S. Bertrand, T. Wu, D. Duran, M. Floyd, P. Abeles, D. Stephen, N. Mertins, A. Lesman, J. Carff, W. Rifenburgh, P. Kaveti, W. Straatman, J. Smith, M. Griffioen, B. Layton, T. de Boer, T. Koolen, P. Neuhaus, and J. Pratt, “Team IHMC’s lessons learned from the DARPA robotics challenge trials,” J. Field Robot., vol. 32, no. 2, pp. 192–208, Mar. 2015. doi: 10.1002/rob.21571
|
| [98] |
T. Koolen, J. Smith, G. Thomas, S. Bertrand, J. Carff, N. Mertins, D. Stephen, P. Abeles, J. Englsberger, S. McCrory, J. van Egmond, M. Griffioen, M. Floyd, S. Kobus, N. Manor, S. Alsheikh, D. Duran, L. Bunch, E. Morphis, L. Colasanto, K.-L. H. Hoang, B. Layton, P. Neuhaus, M. Johnson, and J. Pratt, “Summary of team IHMC’s virtual robotics challenge entry,” in Proc. 13th IEEE-RAS Int. Conf. Humanoid Robots, Atlanta, USA, 2013, pp. 307–314.
|
| [99] |
K. Kojima, T. Sato, A. Schmitz, H. Arie, H. Iwata, and S. Sugano, “Sensor prediction and grasp stability evaluation for in-hand manipulation,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Tokyo, Japan, 2013, pp. 2479–2484.
|
| [100] |
K. Nishiwaki, J. Kuffner, S. Kagami, M. Inaba, and H. Inoue, “The experimental humanoid robot H7: A research platform for autonomous behaviour,” Phil. Trans. Roy. Soc. A: Math. Phys. Eng. Sci., vol. 365, no. 1850, pp. 79–107, Jan. 2007.
|
| [101] |
Y. Asano, T. Kozuki, S. Ookubo, M. Kawamura, S. Nakashima, T. Katayama, I. Yanokura, T. Hirose, K. Kawaharazuka, S. Makino, Y. Kakiuchi, K. Okada, and M. Inaba, “Human mimetic musculoskeletal humanoid Kengoro toward real world physically interactive actions,” in Proc. IEEE-RAS 16th Int. Conf. Humanoid Robots, Cancun, Mexico, 2016, pp. 876–883.
|
| [102] |
Y. Kusuda, “Toyota’s violin-playing robot,” Ind. Robot, vol. 35, no. 6, pp. 504–506, Oct. 2008. doi: 10.1108/01439910810909493
|
| [103] |
S. S. Srinivasa, D. Berenson, M. Cakmak, A. Collet, M. R. Dogar, A. D. Dragan, R. A. Knepper, T. Niemueller, K. Strabala, M. Vande Weghe, and J. Ziegler, “HERB 2.0: Lessons learned from developing a mobile manipulator for the home,” Proc. IEEE, vol. 100, no. 8, pp. 2410–2428, Aug. 2012. doi: 10.1109/JPROC.2012.2200561
|
| [104] |
N. A. Radford, P. Strawser, K. Hambuchen, J. S. Mehling, W. K. Verdeyen, A. S. Donnan, J. Holley, J. Sanchez, V. Nguyen, L. Bridgwater, R. Berka, R. Ambrose, M. Myles Markee, N. J. Fraser‐Chanpong, C. McQuin, J. D. Yamokoski, S. Hart, R. Guo, A. Parsons, B. Wightman, P. Dinh, B. Ames, C. Blakely, C. Edmondson, B. Sommers, R. Rea, C. Tobler, H. Bibby, B. Howard, L. Niu, A. Lee, M. Conover, L. Truong, R. Reed, D. Chesney, R. Platt, G. Johnson, C.-L. Fok, N. Paine, L. Sentis, E. Cousineau, R. Sinnet, J. Lack, M. Powell, B. Morris, A. Ames, and J. Akinyode, “Valkyrie: NASA’s first bipedal humanoid robot,” J. Field Robot., vol. 32, no. 3, pp. 397–419, May 2015. doi: 10.1002/rob.21560
|
| [105] |
B. Akgun, M. Cakmak, J. W. Yoo, and A. L. Thomaz, “Trajectories and keyframes for kinesthetic teaching: A human-robot interaction perspective,” in Proc. 7th ACM/IEEE Int. Conf. Human-Robot Interaction, Boston, USA, 2012, pp. 391–398.
|
| [106] |
A. Parmiggiani, M. Maggiali, L. Natale, F. Nori, A. Schmitz, N. Tsagarakis, J. S. Victor, F. Becchi, G. Sandini, and G. Metta, “The design of the iCub humanoid robot,” Int. J. Humanoid Robot., vol. 9, no. 4, p. 1250027, Dec. 2012. doi: 10.1142/S0219843612500272
|
| [107] |
F. Negrello, M. Garabini, M. G. Catalano, P. Kryczka, W. Choi, D. G. Caldwell, A. Bicchi, and N. G. Tsagarakis, “WALK-MAN humanoid lower body design optimization for enhanced physical performance,” in Proc. IEEE Int. Conf. Robotics and Automation, Stockholm, Sweden, 2016, pp. 1817–1824.
|
| [108] |
N. G. Tsagarakis, S. Morfey, G. M. Cerda, Z. Li, and D. G. Caldwell, “Compliant huMANoid COMAN: Optimal joint stiffness tuning for modal frequency control,” in Proc. IEEE Int. Conf. Robotics and Automation, Karlsruhe, Germany, 2013, pp. 673–678.
|
| [109] |
N. Perrin, N. Tsagarakis, and D. G. Caldwell, “Compliant attitude control and stepping strategy for balance recovery with the humanoid COMAN,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Tokyo, Japan, 2013, pp. 4145–4151.
|
| [110] |
T. Wimböck, D. Nenchev, A. Albu-Schäffer, and G. Hirzinger, “Experimental study on dynamic reactionless motions with DLR’s humanoid robot Justin,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, St. Louis, USA, 2009, pp. 5481–5486.
|
| [111] |
K. Berns, T. Asfour, and R. Dillmann, “Design and control of the humanoid robot ARMAR,” in Romansy 13: Theory and Practice of Robots and Manipulators, A. Morecki, G. Bianchi, and C. Rzymkowski, Eds. Vienna, Austria: Springer, 2000, pp. 307–312.
|
| [112] |
I. M. Verner, A. Polishuk, and N. Krayner, “Science class with RoboThespian: Using a robot teacher to make science fun and engage students,” IEEE Robot. Autom. Mag., vol. 23, no. 2, pp. 74–80, Jun. 2016. doi: 10.1109/MRA.2016.2515018
|
| [113] |
R. Tellez, F. Ferro, S. Garcia, E. Gomez, E. Jorge, D. Mora, D. Pinyol, J. Oliver, O. Torres, J. Velazquez, and D. Faconti, “Reem-B: An autonomous lightweight human-size humanoid robot,” in Proc. 8th IEEE/RAS Int. Conf. Humanoid Robots, Daejeon, South Korea, 2008, pp. 477–483.
|
| [114] |
D. J. Agravante, J. Pagès, and F. Chaumette, “Visual servoing for the REEM humanoid robot’s upper body,” in Proc. IEEE Int. Conf. Robotics and Automation, Karlsruhe, Germany, 2013, pp. 5253–5258.
|
| [115] |
B. G. Draghici, A. E. Dobre, M. Misaros, and O. P. Stan, “Development of a human service robot application using pepper robot as a museum guide,” in Proc. IEEE Int. Conf. Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 2022, pp. 127–131.
|
| [116] |
A. Gardecki and M. Podpora, “Experience from the operation of the pepper humanoid robots,” in Proc. Progress in Applied Electrical Engineering, Koscielisko, Poland, 2017, pp. 1–6.
|
| [117] |
N. Igo, D. Fujita, R. Yamamoto, T. Satake, S. Mitsui, T. Kanno, and K. Hoshino, “Extended movement unit capable of moving rough terrain for pepper,” in Proc. Int. Conf. Computing and Artificial Intelligence, Chengdu, China, 2018, pp. 112–117.
|
| [118] |
K. Kawasugi, T. Yoshino, Y. Nakauchi, and Y. Anzai, “Romeo: Robot-mediated cooperative work for handling 3-dimensional physical objects,” in Proc. 5th Int. Conf. Human-Computer Interaction, Orlando, USA, 1993, pp. 567–572.
|
| [119] |
I. Baturone, F. J. Moreno-Velo, S. Sanchez-Solano, R. M. de Agar, and A. Ollero, “Automatic design of fuzzy control systems for autonomous mobile robots,” in Proc. 28th Annu. Conf. Industrial Electronics Society, Seville, Spain, 2002, pp. 2451–2456.
|
| [120] |
A. Kalouguine, V. De-León-Gómez, C. Chevallereau, S. Dalibard, and Y. Aoustin, “A new human-like walking for the humanoid robot Romeo,” Multibody Syst. Dyn., vol. 53, no. 4, pp. 411–434, Nov. 2021. doi: 10.1007/s11044-021-09805-w
|
| [121] |
T. Jung, J. Lim, H. Bae, K. K. Lee, H.-M. Joe, and J.-H. Oh, “Development of the humanoid disaster response platform DRC-HUBO+,” IEEE Trans. Robot., vol. 34, no. 1, pp. 1–17, Feb. 2018. doi: 10.1109/TRO.2017.2776287
|
| [122] |
Z. Yu, Q. Huang, G. Ma, X. Chen, W. Zhang, J. Li, and J. Gao, “Design and development of the humanoid robot BHR-5,” Adv. Mech. Eng., vol. 6, no. 8, Jan. 2014.
|
| [123] |
Y. Liu and L. Liu, “Accurate real-time ball trajectory estimation with onboard stereo camera system for humanoid Ping-Pong robot,” Robot. Auton. Syst., vol. 101, pp. 34–44, Mar. 2018. doi: 10.1016/j.robot.2017.12.004
|
| [124] |
Q. Xie, Y. Liu, R. Xiong, and J. Chu, “Real-time accurate ball trajectory estimation with ”asynchronous” stereo camera system for humanoid Ping-Pong robot,” in Proc. IEEE Int. Conf. Robotics and Automation, Hong Kong, China, 2014, pp. 6212–6217.
|
| [125] |
L. Liu, J. S. Wang, K. Chen, J. D. Zhao, D. C. Yang, and B. I. T. Bit, “The biped humanoid robot THBIP-1,” in Proc. Int. Workshop on Bio-Robotics and Teleoperation, 2001, pp. 164–167.
|
| [126] |
I. Ha, Y. Tamura, and H. Asama, “Development of open platform humanoid robot DARwIn-OP,” Adv. Robot., vol. 27, no. 3, pp. 223–232, Feb. 2013. doi: 10.1080/01691864.2012.754079
|
| [127] |
D. Gouaillier, V. Hugel, P. Blazevic, C. Kilner, J. Monceaux, P. Lafourcade, B. Marnier, J. Serre, and B. Maisonnier, “Mechatronic design of NAO humanoid,” in Proc. IEEE Int. Conf. Robotics and Automation, Kobe, Japan, 2009, pp. 769–774.
|
| [128] |
M. Lapeyre, S. N’Guyen, A. Le Falher, and P.-Y. Oudeyer, “Rapid morphological exploration with the Poppy humanoid platform,” in Proc. IEEE-RAS Int. Conf. Humanoid Robots, Madrid, Spain, 2014, pp. 959–966.
|
| [129] |
D. Popov, A. Klimchik, and I. Afanasyev, “Design and stiffness analysis of 12 DoF poppy-inspired humanoid,” in Proc. 14th Int. Conf. Informatics in Control, Automation and Robotics, Madrid, Spain, 2017, pp. 66–78.
|
| [130] |
P. Allgeuer, H. Farazi, M. Schreiber, and S. Behnke, “Child-sized 3D printed igus humanoid open platform,” in Proc. IEEE-RAS 15th Int. Conf. Humanoid Robots, Seoul, South Korea, 2015, pp. 33–40.
|
| [131] |
S. Saeedvand, H. S. Aghdasi, and J. Baltes, “Novel lightweight odometric learning method for humanoid robot localization,” Mechatronics, vol. 55, pp. 38–53, Nov. 2018. doi: 10.1016/j.mechatronics.2018.08.007
|
| [132] |
A. Nikkhah, A. Yousefi-Koma, R. Mirjalili, and H. M. Farimani, “Design and implementation of small-sized 3D printed Surena-Mini humanoid platform,” in Proc. 5th RSI Int. Conf. Robotics and Mechatronics, Tehran, Iran, 2017, pp. 132–137.
|
| [133] |
G. Ficht, H. Farazi, A. Brandenburger, D. Rodriguez, D. Pavlichenko, P. Allgeuer, M. Hosseini, and S. Behnke, “NimbRo-OP2X: Adult-sized open-source 3D printed humanoid robot,” in Proc. IEEE-RAS 18th Int. Conf. Humanoid Robots, Beijing, China, 2018, pp. 747–754.
|
| [134] |
G. Ficht, H. Farazi, D. Rodriguez, D. Pavlichenko, P. Allgeuer, A. Brandenburger, and S. Behnke, “Nimbro-OP2X: Affordable adult-sized 3D-printed open-source humanoid robot for research,” Int. J. Humanoid Robot., vol. 17, no. 5, p. 2050021, Oct. 2020. doi: 10.1142/S0219843620500218
|
| [135] |
S. Lohmeier, T. Buschmann, and H. Ulbrich, “Humanoid robot LOLA,” in Proc. IEEE Int. Conf. Robotics and Automation, Kobe, Japan, 2009, pp. 2516–2521.
|
| [136] |
F. Ferland, A. Aumont, D. Létourneau, M.-A. Legault, and F. Michaud, “Johnny-0, a compliant, force-controlled and interactive humanoid autonomous robot,” in Proc. 7th ACM/IEEE Int. Conf. Human-Robot Interaction, Boston, USA, 2012, pp. 417–417.
|
| [137] |
R. S. N. Cruz and J. M. Ibarra Zannatha, “Optimal design for a humanoid robot based on passive dynamic walkers and genetic algorithms,” in Proc. 12th Int. Conf. Electrical Engineering, Computing Science and Automatic Control, Mexico City, Mexico, 2015, pp. 1–6.
|
| [138] |
J. Englsberger, A. Werner, C. Ott, B. Henze, M. A. Roa, G. Garofalo, R. Burger, A. Beyer, O. Eiberger, K. Schmid, and A. Albu-Schäffer, “Overview of the torque-controlled humanoid robot TORO,” in Proc. IEEE-RAS Int. Conf. Humanoid Robots, Madrid, Spain, 2014, pp. 916–923.
|
| [139] |
T. Osawa, T. Ogawa, and T. Nakamura, “Path planning with robot’s transformation for traveling-wave-type mobile robot (TORO-IV),” in Proc. 15th Int. Conf. Climbing and Walking Robots and the Support Technologies for Mobile Machines, Baltimore, USA, 2012, pp. 199–206.
|
| [140] |
S. Marchesi, D. Ghiglino, F. Ciardo, J. Perez-Osorio, E. Baykara, and A. Wykowska, “Do we adopt the intentional stance toward humanoid robots?” Front. Psychol., vol. 10, p. 450, Feb. 2019. doi: 10.3389/fpsyg.2019.00450
|
| [141] |
A. Laurenzi, D. Kanoulas, E. M. Hoffman, L. Muratore, and N. G. Tsagarakis, “Whole-body stabilization for visual-based box lifting with the COMAN+ robot,” in Proc. 3rd IEEE Int. Conf. Robotic Computing, Naples, Italy, 2019, pp. 445–446.
|
| [142] |
J. Lee, H. Dallali, N. Tsagarakis, and D. Caldwell, “Robust and model-free link position tracking control for humanoid COMAN with multiple compliant joints,” in Proc. 13th IEEE-RAS Int. Conf. Humanoid Robots, Atlanta, USA, 2013, pp. 1–7.
|
| [143] |
R. Van Ham, B. Verrelst, B. Vanderborght, F. Daerden, and D. Lefeber, “Experimental results on the first movements of the pneumatic biped “Lucy”,” in Proc. 6th Int. Conf. Climbing and Walking Robots and the Support Technologies for Mobile Machines, Catania, Italy, 2003, pp. 485–492.
|
| [144] |
J.-Y. Kim, I.-W. Park, J. Lee, M.-S. Kim, B.-K. Cho, and J.-H. Oh, “System design and dynamic walking of humanoid robot KHR-2,” in Proc. IEEE Int. Conf. Robotics and Automation, Barcelona, Spain, 2005, pp. 1431–1436.
|
| [145] |
J.-Y. Kim, I.-W. Park, J. Lee, and J.-H. Oh, “Experiments of vision guided walking of humanoid robot, KHR-2,” in Proc. 5th IEEE-RAS Int. Conf. Humanoid Robots, Tsukuba, Japan, 2005, pp. 135–140.
|
| [146] |
I.-W. Park, J.-Y. Kim, J. Lee, and J.-H. Oh, “Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot 3: HUBO),” in Proc. 5th IEEE-RAS Int. Conf. Humanoid Robots, Tsukuba, Japan, 2005, pp. 321–326.
|
| [147] |
I.-W. Park, J.-Y. Kim, and J.-H. Oh, “Online walking pattern generation and its application to a biped humanoid robot – KHR-3 (HUBO),” Adv. Robot., vol. 22, no. 2-3, pp. 159–190, Mar. 2008. doi: 10.1163/156855308X292538
|
| [148] |
G. Wang, Q. Huang, J. Geng, H. Deng, and K. Li, “Cooperation of dynamic patterns and sensory reflex for humanoid walking,” in Proc. IEEE Int. Conf. Robotics and Automation, Taipei, China, 2003, pp. 2472–2477.
|
| [149] |
B. Cao, Y. Gu, K. Sun, M. Jin, and H. Liu, “Development of HIT humanoid robot,” in Proc. 10th Int. Conf. Intelligent Robotics and Applications, Wuhan, China, 2017, pp. 286–297.
|
| [150] |
Z. Shi, W. Xu, X. Wen, and P. Jiang, “Distributed hierarchical control system of humanoid robot THBIP-1,” in Proc. 4th World Congr. Intelligent Control and Automation, Shanghai, China, 2002, pp. 1265–1269.
|
| [151] |
Z. Xia, K. Chen, and Y. He, “Modeling and motion planning of the infant-size humanoid robot THBIP-II,” in Proc. 7th IEEE-RAS Int. Conf. Humanoid Robots, Pittsburgh, USA, 2007, pp. 577–582.
|
| [152] |
Z. Xia, L. Liu, J. Xiong, Q. Yi, and K. Chen, “Design aspects and development of humanoid robot THBIP-2,” Robotica, vol. 26, no. 1, pp. 109–116, Jan. 2008. doi: 10.1017/S0263574707003645
|
| [153] |
J. Murphy, U. Gretzel, and J. Pesonen, “Marketing robot services in hospitality and tourism: The role of anthropomorphism,” J. Travel Tourism Mark., vol. 36, no. 7, pp. 784–795, Feb. 2019. doi: 10.1080/10548408.2019.1571983
|
| [154] |
U. Gupta, L. Qin, Y. Wang, H. Godaba, and J. Zhu, “Soft robots based on dielectric elastomer actuators: A review,” Smart Mater. Struct., vol. 28, no. 10, p. 103002, Sept. 2019. doi: 10.1088/1361-665X/ab3a77
|
| [155] |
T.-Y. Huang, H.-W. Huang, D. D. Jin, Q. Y. Chen, J. Y. Huang, L. Zhang, and H. L. Duan, “Four-dimensional micro-building blocks,” Sci. Adv., vol. 6, no. 3, p. eaav8219, Jan. 2020. doi: 10.1126/sciadv.aav8219
|
| [156] |
Y. Sun, H. Tang, Y. Tang, J. Zheng, D. Dong, X. Chen, F. Liu, L. Bai, W. Ge, L. Xin, H. Pu, Y. Peng, and J. Luo, “Review of recent progress in robotic knee prosthesis related techniques: Structure, actuation and control,” J. Bionic Eng., vol. 18, no. 4, pp. 764–785, Aug. 2021. doi: 10.1007/s42235-021-0065-4
|
| [157] |
I. Kotseruba and J. K. Tsotsos, “40 years of cognitive architectures: Core cognitive abilities and practical applications,” Artif. Intell. Rev., vol. 53, no. 1, pp. 17–94, Jan. 2020. doi: 10.1007/s10462-018-9646-y
|
| [158] |
F. McLeay, V. S. Osburg, V. Yoganathan, and A. Patterson, “Replaced by a robot: Service implications in the age of the machine,” J. Ser. Res., vol. 24, no. 1, pp. 104–121, Feb. 2021. doi: 10.1177/1094670520933354
|
| [159] |
C. Yang, Y. Jiang, J. Na, Z. Li, L. Cheng, and C.-Y. Su, “Finite-time convergence adaptive fuzzy control for dual-arm robot with unknown kinematics and dynamics,” IEEE Trans. Fuzzy Syst., vol. 27, no. 3, pp. 574–588, Mar. 2019. doi: 10.1109/TFUZZ.2018.2864940
|
| [160] |
I. P. I. Pappas, M. R. Popovic, T. Keller, V. Dietz, and M. Morari, “A reliable gait phase detection system,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 9, no. 2, pp. 113–125, Jun. 2001. doi: 10.1109/7333.928571
|
| [161] |
K. Wampler and Z. Popović, “Optimal gait and form for animal locomotion,” ACM Trans. Graph., vol. 28, no. 3, p. 60, Aug. 2009.
|
| [162] |
H. Knuesel, H. Geyer, and A. Seyfarth, “Influence of swing leg movement on running stability,” Hum. Mov. Sci., vol. 24, no. 4, pp. 532–543, Aug. 2005. doi: 10.1016/j.humov.2005.08.002
|
| [163] |
J. Allali, R. Fabre, L. Gondry, L. Hofer, O. Ly, S. N’Guyen, G. Passault, A. Pirrone, and Q. Rouxel, “Rhoban football club: RoboCup humanoid kid-size 2017 champion team paper,” in RoboCup 2017: Robot World Cup XXI, H. Akiyama, O. Obst, C. Sammut, and F. Tonidandel, Eds. Cham, Germany: Springer, 2018, pp. 423–434.
|
| [164] |
A. Mejias, R. S. Herrera, and M. A. Márquez, A. J. Calderón, I. Gonzalez, and J. M. Andújar, “Easy handling of sensors and actuators over TCP/IP networks by open source hardware/software,” Sensors, vol. 17, no. 1, p. 94, Jan. 2017. doi: 10.3390/s17010094
|
| [165] |
Y. Almubarak and Y. Tadesse, “Design and motion control of bioinspired humanoid robot head from servo motors toward artificial muscles,” in Proc. SPIE 10163, Electroactive Polymer Actuators and Devices, Portland, USA, 2017, pp. 101631U.
|
| [166] |
A. M. Al-Busaidi, “Dvelopment of an educational environment for online control of a biped robot using MATLAB and Arduino,” in Proc. 9th France-Japan & 7th Europe-Asia Congr. Mechatronics/13th Int. Workshop on Research and Education in Mechatronics, Paris, France, 2012, pp. 337–344.
|
| [167] |
M. W. Spong, “An historical perspective on the control of robotic manipulators,” Annu. Rev. Control Robot. Auton. Syst., vol. 5, pp. 1–31, May 2022. doi: 10.1146/annurev-control-042920-094829
|
| [168] |
J. Yamaguchi, E. Soga, S. Inoue, and A. Takanishi, “Development of a bipedal humanoid robot-control method of whole body cooperative dynamic biped walking,” in Proc. IEEE Int. Conf. Robotics and Automation, Detroit, USA, 1999, pp. 368–374.
|
| [169] |
T. Sugihara, Y. Nakamura, and H. Inoue, “Real-time humanoid motion generation through ZMP manipulation based on inverted pendulum control,” in Proc. IEEE Int. Conf. Robotics and Automation, Washington, USA, 2002, pp. 1404–1409.
|
| [170] |
C. Tao, J. Xue, Z. Zhang, F. Cao, C. Li, and H. Gao, “Gait optimization method for humanoid robots based on parallel comprehensive learning particle swarm optimizer algorithm,” Front. Neurorobot., vol. 14, p. 600885, Jan. 2021. doi: 10.3389/fnbot.2020.600885
|
| [171] |
T. T. Huan, K. B. Thy, N. H. H. Trung, and H. P. H. Anh, “Stable gait optimization for small-sized humanoid robot using CFO,” in Proc. 15th Int. Conf. Control, Automation, Robotics and Vision, Singapore, Singapore, 2018, pp. 436–441.
|
| [172] |
J. H. Choe, J.-H. Kim, S. Hong, J. Lee, and H.-W. Park, “Seamless reaction strategy for bipedal locomotion exploiting real-time nonlinear model predictive control,” IEEE Robot. Autom. Lett., vol. 8, no. 8, pp. 5031–5038, Aug. 2023. doi: 10.1109/LRA.2023.3291273
|
| [173] |
W. Ke, Y. Bai, H. Li, K. Chen, and Q. Yuan, “Control of stepping downstairs for humanoid robot based on dynamic multi-objective optimization,” Concurrency Comput.: Pract. Exper., vol. 33, no. 5, p. e5999, Mar. 2021. doi: 10.1002/cpe.5999
|
| [174] |
Y. Yoshida, K. Takeuchi, D. Sato, and D. Nenchev, “Balance control of humanoid robots in response to disturbances in the frontal plane,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, Karon Beach, Thailand, 2011, pp. 2241–2242.
|
| [175] |
J. W. Kim, T. T. Tran, C. Van Dang, and B. Kang, “Motion and walking stabilization of humanoids using sensory reflex control,” Int. J. Adv. Robot. Syst., vol. 13, no. 2, p. 77, Mar.–Apr. 2016. doi: 10.5772/63116
|
| [176] |
K. Seo, J. Kim, and K. Roh, “Towards natural bipedal walking: Virtual gravity compensation and capture point control,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 2012, pp. 4019–4026.
|
| [177] |
M. C. Capolei, E. Angelidis, E. Falotico, H. H. Lund, and S. Tolu, “A biomimetic control method increases the adaptability of a humanoid robot acting in a dynamic environment,” Front. Neurorobot., vol. 13, p. 70, Aug. 2019. doi: 10.3389/fnbot.2019.00070
|
| [178] |
M. Sharifi, J. K. Mehr, V. K. Mushahwar, and M. Tavakoli, “Adaptive CPG-based gait planning with learning-based torque estimation and control for exoskeletons,” IEEE Robot. Autom. Lett., vol. 6, no. 4, pp. 8261–8268, Oct. 2021. doi: 10.1109/LRA.2021.3105996
|
| [179] |
D. Ferigo, R. Camoriano, P. M. Viceconte, D. Calandriello, S. Traversaro, L. Rosasco, and D. Pucci, “On the emergence of whole-body strategies from humanoid robot push-recovery learning,” IEEE Robot. Autom. Lett., vol. 6, no. 4, pp. 8561–8568, Oct. 2021. doi: 10.1109/LRA.2021.3076955
|
| [180] |
D. Luo, X. Han, Y. Ding, Y. Ma, Z. Liu, and X. Wu, “Learning push recovery for a bipedal humanoid robot with dynamical movement primitives,” in Proc. IEEE-RAS 15th Int. Conf. Humanoid Robots, Seoul, South Korea, 2015, pp. 1013–1019.
|
| [181] |
P. M. Viceconte, R. Camoriano, G. Romualdi, D. Ferigo, S. Dafarra, S. Traversaro, G. Oriolo, L. Rosasco, and D. Pucci, “ADHERENT: Learning human-like trajectory generators for whole-body control of humanoid robots,” IEEE Robot. Autom. Lett., vol. 7, no. 2, pp. 2779–2786, Apr. 2022. doi: 10.1109/LRA.2022.3141658
|
| [182] |
M. Mowbray, R. Smith, E. A. Del Rio-Chanona, and D. Zhang, “Using process data to generate an optimal control policy via apprenticeship and reinforcement learning,” AIChE J., vol. 67, no. 9, p. e17306, Sept. 2021. doi: 10.1002/aic.17306
|
| [183] |
J. Pratt, J. Carff, S. Drakunov, and A. Goswami, “Capture point: A step toward humanoid push recovery,” in Proc. 6th IEEE-RAS Int. Conf. Humanoid Robots, Genova, Italy, 2006, pp. 200–207.
|
| [184] |
S. Kajita, F. Kanehiro, K. Kaneko, K. Fujiwara, K. Harada, K. Yokoi, and H. Hirukawa, “Biped walking pattern generation by using preview control of zero-moment point,” in Proc. IEEE Int. Conf. Robotics and Automation, Taipei, China, 2003, pp. 1620–1626.
|
| [185] |
K. Yamamoto, T. Kamioka, and T. Sugihara, “Survey on model-based biped motion control for humanoid robots,” Adv. Robot., vol. 34, no. 21–22, pp. 1353–1369, Nov. 2020. doi: 10.1080/01691864.2020.1837670
|
| [186] |
P. Mishra, U. Jain, S. Choudhury, S. Singh, A. Pandey, A. Sharma, R. Singh, V. K. Pathak, K. K. Saxena, and A. Gehlot, “Footstep planning of humanoid robot in ROS environment using generative adversarial networks (GANs) deep learning,” Robot. Auton. Syst., vol. 158, p. 104269, Dec. 2022. doi: 10.1016/j.robot.2022.104269
|
| [187] |
M. A. Elhosseini, A. Y. Haikal, M. Badawy, and N. Khashan, “Biped robot stability based on an A-C parametric whale optimization algorithm,” J. Comput. Sci., vol. 31, pp. 17–32, Feb. 2019. doi: 10.1016/j.jocs.2018.12.005
|
| [188] |
C. Liu, T. Zhang, C. Zhang, M. Liu, and Q. Chen, “Foot placement compensator design for humanoid walking based on discrete control lyapunov function,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 4, pp. 2332–2341, Apr. 2021. doi: 10.1109/TSMC.2019.2912417
|
| [189] |
M. Murooka, M. Morisawa, and F. Kanehiro, “Centroidal trajectory generation and stabilization based on preview control for humanoid multi-contact motion,” IEEE Robot. Autom. Lett., vol. 7, no. 3, pp. 8225–8232, Jul. 2022. doi: 10.1109/LRA.2022.3186515
|
| [190] |
K. Bergamin, S. Clavet, D. Holden, and J. R. Forbes, “DReCon: Data-driven responsive control of physics-based characters,” Acm Trans. Graph., vol. 38, no. 6, p. 206, Dec. 2019.
|
| [191] |
J. E. Pratt and R. Tedrake, “Velocity-based stability margins for fast bipedal walking,” in Fast Motions in Biomechanics and Robotics, M. Diehl and K. Mombaur, Eds. Berlin, Heidelberg, Germany: Springer, 2006, vol. 340, pp. 299–324.
|
| [192] |
H. F. N. Al-Shuka, F. Allmendinger, B. Corves, and W.-H. Zhu, “Modeling, stability and walking pattern generators of biped robots: A review,” Robotica, vol. 32, no. 6, pp. 907–934, Sept. 2014. doi: 10.1017/S0263574713001124
|
| [193] |
M. Bjelonic, C. D. Bellicoso, Y. de Viragh, D. Sako, F. D. Tresoldi, F. Jenelten, and M. Hutter, “Keep rollin’-whole-body motion control and planning for wheeled quadrupedal robots,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 2116–2123, Apr. 2019. doi: 10.1109/LRA.2019.2899750
|
| [194] |
H. Su, A. Mariani, S. E. Ovur, A. Menciassi, G. Ferrigno, and E. De Momi, “Toward teaching by demonstration for robot-assisted minimally invasive surgery,” IEEE Trans. Automat. Sci. Eng., vol. 18, no. 2, pp. 484–494, Apr. 2021. doi: 10.1109/TASE.2020.3045655
|
| [195] |
T. T. Mac, C. Copot, D. T. Tran, and R. De Keyser, “Heuristic approaches in robot path planning: A survey,” Robot. Auton. Syst., vol. 86, pp. 13–28, Dec. 2016. doi: 10.1016/j.robot.2016.08.001
|
| [196] |
F. Martín, J. Ginés, D. Vargas, F. J. Rodríguez-Lera, and V. Matellán, “Planning topological navigation for complex indoor environments,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Madrid, Spain, 2018, pp. 8227–8232.
|
| [197] |
M. Selvaggio, A. Garg, F. Ruggiero, G. Oriolo, and B. Siciliano, “Non-prehensile object transportation via model predictive non-sliding manipulation control,” IEEE Trans. Control Syst. Technol., vol. 31, no. 5, pp. 2231–2244, Sept. 2023. doi: 10.1109/TCST.2023.3277224
|
| [198] |
A. Meduri, P. Shah, J. Viereck, M. Khadiv, I. Havoutis, and L. Righetti, “BiConMP: A nonlinear model predictive control framework for whole body motion planning,” IEEE Trans. Robot., vol. 39, no. 2, pp. 905–922, Apr. 2023. doi: 10.1109/TRO.2022.3228390
|
| [199] |
C. Yang, C. Pu, G. Xin, J. Zhang, and Z. Li, “Learning complex motor skills for legged robot fall recovery,” IEEE Robot. Autom. Lett., vol. 8, no. 7, pp. 4307–4314, Jul. 2023. doi: 10.1109/LRA.2023.3281290
|
| [200] |
H. Qi, X. Chen, Z. Yu, G. Huang, Y. Liu, L. Meng, and Q. Huang, “Vertical jump of a humanoid robot with CoP-guided angular momentum control and impact absorption,” IEEE Trans. Robot., vol. 39, no. 4, pp. 3154–3166, Aug. 2023. doi: 10.1109/TRO.2023.3271136
|
| [201] |
J. Ding, T. L. Lam, L. Ge, J. Pang, and Y. Huang, “Safe and adaptive 3-D locomotion via constrained task-space imitation learning,” IEEE/ASME Trans. Mechatron., vol. 28, no. 6, pp. 3029–3040, Dec. 2023. doi: 10.1109/TMECH.2023.3239099
|
| [202] |
Z. Jiang, Y. Ma, X. Cao, M. Shen, C. Yin, H. Liu, J. Cui, Z. Sun, X. Huang, and H. Li, “FC-EODR: Immersive humanoid dual-arm dexterous explosive ordnance disposal robot,” Biomimetics, vol. 8, no. 1, p. 67, Feb. 2023. doi: 10.3390/biomimetics8010067
|
| [203] |
Y. Zhou, J. Zhao, P. Lu, Z. Wang, and B. He, “TacSuit: A wearable large-area, bioinspired multimodal tactile skin for collaborative robots,” IEEE Trans. Ind. Electron., vol. 71, no. 2, pp. 1708–1717, Feb. 2024. doi: 10.1109/TIE.2023.3253921
|
| [204] |
S. Pohtongkam and J. Srinonchat, “Object recognition for humanoid robots using full hand tactile sensor,” IEEE Access, vol. 11, pp. 20284–20297, Feb. 2023. doi: 10.1109/ACCESS.2023.3249573
|
| [205] |
Y. Qin, A. Escande, F. Kanehiro, and E. Yoshida, “Dual-arm mobile manipulation planning of a long deformable object in industrial installation,” IEEE Robot. Autom. Lett., vol. 8, no. 5, pp. 3039–3046, May 2023. doi: 10.1109/LRA.2023.3264779
|
| [206] |
J. Ramos and S. Kim, “Humanoid dynamic synchronization through whole-body bilateral feedback teleoperation,” IEEE Trans. Robot., vol. 34, no. 4, pp. 953–965, Aug. 2018. doi: 10.1109/TRO.2018.2830387
|
| [207] |
X. Liu, Y. Chen, J. Li, and A. Cangelosi, “Real-time robotic mirrored behavior of facial expressions and head motions based on lightweight networks,” IEEE Internet Things J., vol. 10, no. 2, pp. 1401–1413, Jan. 2023. doi: 10.1109/JIOT.2022.3205123
|
| [208] |
S. Zhang, Y. Chen, L. Zhang, X. Gao, and X. Chen, “Study on robot grasping system of SSVEP-BCI based on augmented reality stimulus,” Tsinghua Sci. Technol., vol. 28, no. 2, pp. 322–329, Apr. 2023. doi: 10.26599/TST.2021.9010085
|
| [209] |
L. Pan, F. Wang, Y. Cheng, W. R. Leow, Y.-W. Zhang, M. Wang, P. Cai, B. Ji, D. Li, and X. Chen, “A supertough electro-tendon based on spider silk composites,” Nat. Commun., vol. 11, no. 1, p. 1332, Mar. 2020. doi: 10.1038/s41467-020-14988-5
|
| [210] |
K. Hwang, S. W. Lee, S. W. Karng, and S. Y. Kim, “Thermal performance of non-metallic two-phase cold plates for humanoid robot cooling,” in Proc. 11th Intersociety Conf. Thermal and Thermomechanical Phenomena in Electronic Systems, Orlando, USA, 2008, pp. 6–11.
|
| [211] |
D. Chen, Q. Liu, Z. Han, J. Zhang, H. Song, K. Wang, Z. Song, S. Wen, Y. Zhou, C. Yan, and Y. Shi, “4D printing strain self-sensing and temperature self-sensing integrated sensor-actuator with bioinspired gradient gaps,” Adv. Sci., vol. 7, no. 13, p. 20005484, Jul. 2020.
|
| [212] |
Y. Ma, D. Xu, and F. Qin, “Efficient insertion control for precision assembly based on demonstration learning and reinforcement learning,” IEEE Trans. Ind. Inf., vol. 17, no. 7, pp. 4492–4502, Jul. 2021. doi: 10.1109/TII.2020.3020065
|
| [213] |
N. Wang, C. Chen, and C. Yang, “A robot learning framework based on adaptive admittance control and generalizable motion modeling with neural network controller,” Neurocomputing, vol. 390, pp. 260–267, May 2020. doi: 10.1016/j.neucom.2019.04.100
|
| [214] |
H. Huang, T. Zhang, C. Yang, and C. L. P. Chen, “Motor learning and generalization using broad learning adaptive neural control,” IEEE Trans. Ind. Electron., vol. 67, no. 10, pp. 8608–8617, Oct. 2020. doi: 10.1109/TIE.2019.2950853
|
| [215] |
C. L. P. Chen and Z. Liu, “Broad learning system: An effective and efficient incremental learning system without the need for deep architecture,” IEEE Trans. Neural Netw. Learn. Syst., vol. 29, no. 1, pp. 10–24, Jan. 2018. doi: 10.1109/TNNLS.2017.2716952
|
| [216] |
M. Andrychowicz, B. Baker, M. Chociej, R. Józefowicz, B. McGrew, J. Pachocki, A. Petron, M. Plappert, G. Powell, A. Ray, J. Schneider, S. Sidor, J. Tobin, P. Welinder, L. Weng, and W. Zaremba, “Learning dexterous in-hand manipulation,” Int. J. Robot. Res., vol. 39, no. 1, pp. 3–20, Jan. 2020. doi: 10.1177/0278364919887447
|
| [217] |
S. Kamio and H. Iba, “Adaptation technique for integrating genetic programming and reinforcement learning for real robots,” IEEE Trans. Evol. Computat., vol. 9, no. 3, pp. 318–333, Jun. 2005. doi: 10.1109/TEVC.2005.850290
|
| [218] |
L. Hu, C. Zhou, and Z. Sun, “Estimating biped gait using spline-based probability distribution function with Q-learning,” IEEE Trans. Ind. Electron., vol. 55, no. 3, pp. 1444–1452, Mar. 2008. doi: 10.1109/TIE.2007.908526
|
| [219] |
H. Su, W. Qi, Y. Hu, H. R. Karimi, G. Ferrigno, and E. De Momi, “An incremental learning framework for human-like redundancy optimization of anthropomorphic manipulators,” IEEE Trans. Ind. Inf., vol. 18, no. 3, pp. 1864–1872, Mar. 2022. doi: 10.1109/TII.2020.3036693
|
| [220] |
O. Kroemer, S. Niekum, and G. Konidaris, “A review of robot learning for manipulation: Challenges, representations, and algorithms,” J. Mach. Learn. Res., vol. 22, no. 30, pp. 1–82, Jan. 2021.
|
| [221] |
D. H. Tran, F. Hamker, and J. Nassour, “A humanoid robot learns to recover perturbation during swinging motion,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 50, no. 10, pp. 3701–3712, Oct. 2020. doi: 10.1109/TSMC.2018.2884619
|
| [222] |
A. Rezaeipanah, P. Amiri, and S. Jafari, “Performing the kick during walking for robocup 3D soccer simulation league using reinforcement learning algorithm,” Int. J. Soc. Robot., vol. 13, no. 6, pp. 1235–1252, Sept. 2021. doi: 10.1007/s12369-020-00712-2
|
| [223] |
K. Lobos-Tsunekawa, F. Leiva, and J. Ruiz-del-Solar, “Visual navigation for biped humanoid robots using deep reinforcement learning,” IEEE Robot. Autom. Lett., vol. 3, no. 4, pp. 3247–3254, Oct. 2018. doi: 10.1109/LRA.2018.2851148
|
| [224] |
T. Hester, M. Quinlan, and P. Stone, “Generalized model learning for reinforcement learning on a humanoid robot,” in Proc. IEEE Int. Conf. Robotics and Automation, Anchorage, USA, 2010, pp. 2369–2374.
|
| [225] |
V. Tangkaratt, J. Morimoto, and M. Sugiyama, “Model-based reinforcement learning with dimension reduction,” Neural Netw., vol. 84, pp. 1–16, Dec. 2016. doi: 10.1016/j.neunet.2016.08.005
|
| [226] |
R. Lober, O. Sigaud, and V. Padois, “Task feasibility maximization using model-free policy search and model-based whole-body control,” Front. Robot. AI, vol. 7, p. 61, Jun. 2020. doi: 10.3389/frobt.2020.00061
|
| [227] |
N. A. Hansen, H. Sun, and X. Wang, “Temporal difference learning for model predictive control,” in Proc. 39th Int. Conf. Machine Learning, Baltimore, USA, 2022, pp. 8387–8406.
|
| [228] |
B. Ichter and M. Pavone, “Robot motion planning in learned latent spaces,” IEEE Robot. Autom. Lett., vol. 4, no. 3, pp. 2407–2414, Jul. 2019. doi: 10.1109/LRA.2019.2901898
|
| [229] |
J. Li, Z. Li, X. Li, Y. Feng, Y. Hu, and B. Xu, “Skill learning strategy based on dynamic motion primitives for human-robot cooperative manipulation,” IEEE Trans. Cogn. Dev. Syst., vol. 13, no. 1, pp. 105–117, Mar. 2021. doi: 10.1109/TCDS.2020.3021762
|
| [230] |
N. Wang, C. Chen, and A. Di Nuovo, “A framework of hybrid force/motion skills learning for robots,” IEEE Trans. Cogn. Dev. Syst., vol. 13, no. 1, pp. 162–170, Mar. 2021. doi: 10.1109/TCDS.2020.2968056
|
| [231] |
S. Schaal, “Is imitation learning the route to humanoid robots?” Trends Cognit. Sci., vol. 3, no. 6, pp. 233–242, Jun. 1999. doi: 10.1016/S1364-6613(99)01327-3
|
| [232] |
F. Qin, D. Xu, D. Zhang, and Y. Li, “Robotic skill learning for precision assembly with microscopic vision and force feedback,” IEEE/ASME Trans. Mechatron., vol. 24, no. 3, pp. 1117–1128, Jun. 2019. doi: 10.1109/TMECH.2019.2909081
|
| [233] |
C. Yang, C. Chen, W. He, R. Cui, and Z. Li, “Robot learning system based on adaptive neural control and dynamic movement primitives,” IEEE Trans. Neural Netw. Learn. Syst., vol. 30, no. 3, pp. 777–787, Mar. 2019. doi: 10.1109/TNNLS.2018.2852711
|
| [234] |
Y. Zhang, M. Li, and C. Yang, “Robot learning system based on dynamic movement primitives and neural network,” Neurocomputing, vol. 451, pp. 205–214, Sept. 2021. doi: 10.1016/j.neucom.2021.04.034
|
| [235] |
Y. Wu, Y. Su, and Y. Demiris, “A morphable template framework for robot learning by demonstration: Integrating one-shot and incremental learning approaches,” Robot. Auton. Syst., vol. 62, no. 10, pp. 1517–1530, Oct. 2014. doi: 10.1016/j.robot.2014.05.010
|
| [236] |
K. Lee, Y. Su, T.-K. Kim, and Y. Demiris, “A syntactic approach to robot imitation learning using probabilistic activity grammars,” Robot. Auton. Syst., vol. 61, no. 12, pp. 1323–1334, Dec. 2013. doi: 10.1016/j.robot.2013.08.003
|
| [237] |
J. Hua, L. Zeng, G. Li, and Z. Ju, “Learning for a robot: Deep reinforcement learning, imitation learning, transfer learning,” Sensors, vol. 21, no. 4, p. 1278, Feb. 2021. doi: 10.3390/s21041278
|
| [238] |
L. R. Rabiner, “A tutorial on hidden Markov models and selected applications in speech recognition,” Proc. IEEE, vol. 77, no. 2, pp. 257–286, Feb. 1989. doi: 10.1109/5.18626
|
| [239] |
M. Field, D. Stirling, Z. Pan, and F. Naghdy, “Learning trajectories for robot programing by demonstration using a coordinated mixture of factor analyzers,” IEEE Trans. Cybern., vol. 46, no. 3, pp. 706–717, Mar. 2016. doi: 10.1109/TCYB.2015.2414277
|
| [240] |
A. J. Ijspeert, J. Nakanishi, and S. Schaal, “Movement imitation with nonlinear dynamical systems in humanoid robots,” in Proc. IEEE Int. Conf. Robotics and Automation, Washington, USA, 2002, pp. 1398–1403.
|
| [241] |
Y. Huang, L. Rozo, J. Silvério, and D. G. Caldwell, “Kernelized movement primitives,” Int. J. Robot. Res., vol. 38, no. 7, pp. 833–852, May 2019. doi: 10.1177/0278364919846363
|
| [242] |
Z. Dong, Z. Li, Y. Yan, S. Calinon, and F. Chen, “Passive bimanual skills learning from demonstration with motion graph attention networks,” IEEE Robot. Autom. Lett., vol. 7, no. 2, pp. 4917–4923, Apr. 2022. doi: 10.1109/LRA.2022.3152974
|
| [243] |
D. S. Brown and S. Niekum, “Machine teaching for inverse reinforcement learning: Algorithms and applications,” in Proc. 33rd AAAI Conf. Artificial Intelligence, Honolulu, USA, 2019, pp. 7749–7758.
|
| [244] |
P. Kamalaruban, R. Devidze, V. Cevher, and A. Singla, “Interactive teaching algorithms for inverse reinforcement learning,” in Proc. 28th Int. Joint Conf. Artificial Intelligence, Macao, China, 2019, pp. 2692–2700.
|
| [245] |
C. Tan, Y. Li, and Y. Cheng, “An inverse reinforcement learning algorithm for semi-Markov decision processes,” in Proc. IEEE Symp. Series on Computational Intelligence, Honolulu, USA, 2017, pp. 1256–1261.
|
| [246] |
W. Huang, F. Braghin, and Z. Wang, “Learning to drive via apprenticeship learning and deep reinforcement learning,” in Proc. IEEE 31st Int. Conf. Tools With Artificial Intelligence, Portland, USA, 2019, pp. 1536–1540.
|
| [247] |
H. T. Nguyen, M. Garratt, L. T. Bui, and H. Abbass, “Apprenticeship learning for continuous state spaces and actions in a swarm-guidance shepherding task,” in Proc. IEEE Symp. Series on Computational Intelligence, Xiamen, China, 2019, pp. 102–109.
|
| [248] |
H. T. Nguyen, M. Garratt, L. T. Bui, and H. Abbass, “Apprenticeship bootstrapping: Inverse reinforcement learning in a multi-skill UAV-UGV coordination task,” in Proc. 17th Int. Conf. Autonomous Agents and MultiAgent Systems, Stockholm, Sweden, 2018, pp. 2204–2206.
|
| [249] |
X.-l. Chen, L. Cao, Z.-X. Xu, J. Lai, and C.-X. Li, “A study of continuous maximum entropy deep inverse reinforcement learning,” Math. Probl. Eng., vol. 2019, p. 4834516, Apr. 2019.
|
| [250] |
A. J. Snoswell, S. P. N. Singh, and N. Ye, “Revisiting maximum entropy inverse reinforcement learning: New perspectives and algorithms,” in Proc. IEEE Symp. Series on Computational Intelligence, Canberra, Australia, 2020, pp. 241–249.
|
| [251] |
L. Song, D. Li, X. Wang, and X. Xu, “Adaboost maximum entropy deep inverse reinforcement learning with truncated gradient,” Inf. Sci., vol. 602, pp. 328–350, Jul. 2022. doi: 10.1016/j.ins.2022.04.017
|
| [252] |
Z. Wu, L. Sun, W. Zhan, C. Yang, and M. Tomizuka, “Efficient sampling-based maximum entropy inverse reinforcement learning with application to autonomous driving,” IEEE Robot. Autom. Lett., vol. 5, no. 4, pp. 5355–5362, Oct. 2020. doi: 10.1109/LRA.2020.3005126
|
| [253] |
Z. Zhou, M. Bloem, and N. Bambos, “Infinite time horizon maximum causal entropy inverse reinforcement learning,” IEEE Trans. Autom. Control, vol. 63, no. 9, pp. 2787–2802, Sept. 2018. doi: 10.1109/TAC.2017.2775960
|
| [254] |
C. Finn, S. Levine, and P. Abbeel, “Guided cost learning: Deep inverse optimal control via policy optimization,” in Proc. 33rd Int. Conf. Machine Learning, New York, USA, 2016, pp. 49–58.
|
| [255] |
C. Finn, X. Y. Tan, Y. Duan, T. Darrell, S. Levine, and P. Abbeel, “Deep spatial autoencoders for visuomotor learning,” in Proc. IEEE Int. Conf. Robotics and Automation, Stockholm, Sweden, 2016, pp. 512–519.
|
| [256] |
T. Zhang, Y. Liu, M. Hwang, K.-S. Hwang, C. Y. Ma, and J. Cheng, “An end-to-end inverse reinforcement learning by a boosting approach with relative entropy,” Inf. Sci., vol. 520, pp. 1–14, May 2020. doi: 10.1016/j.ins.2020.01.023
|
| [257] |
G. Zuo, K. Chen, J. Lu, and X. Huang, “Deterministic generative adversarial imitation learning,” Neurocomputing, vol. 388, pp. 60–69, May 2020. doi: 10.1016/j.neucom.2020.01.016
|
| [258] |
J. Ho and S. Ermon, “Generative adversarial imitation learning,” in Proc. 30th Int. Conf. Neural Information Processing Systems, Barcelona, Spain, 2016, pp. 4572–4580.
|
| [259] |
G. Zuo, Q. Zhao, S. Huang, J. Li, and D. Gong, “Adversarial imitation learning with mixed demonstrations from multiple demonstrators,” Neurocomputing, vol. 457, pp. 365–376, Oct. 2021. doi: 10.1016/j.neucom.2021.06.053
|
| [260] |
H. Xu, X. Zhan, H. Yin, and H. Qin, “Discriminator-weighted offline imitation learning from suboptimal demonstrations,” in Proc. 39th Int. Conf. Machine Learning, Baltimore, USA, 2022, pp. 24725–24742.
|
| [261] |
T. Xu, Z. Li, and Y. Yu, “Error bounds of imitating policies and environments for reinforcement learning,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 44, no. 10, pp. 6968–6980, Oct. 2022. doi: 10.1109/TPAMI.2021.3096966
|
| [262] |
M. Taylor, S. Bashkirov, J. F. Rico, I. Toriyama, N. Miyada, H. Yanagisawa, and K. Ishizuka, “Learning bipedal robot locomotion from human movement,” in Proc. IEEE Int. Conf. Robotics and Automation, Xi’an, China, 2021, pp. 2797–2803.
|
| [263] |
R. Batke, F. Yu, J. Dao, J. Hurst, R. L. Hatton, A. Fern, and K. Green, “Optimizing bipedal maneuvers of single rigid-body models for reinforcement learning,” in Proc. IEEE-RAS 21st Int. Conf. Humanoid Robots, Ginowan, Japan, 2022, pp. 714–721.
|
| [264] |
V. Krishnamurthy and G. Yin, “Langevin dynamics for adaptive inverse reinforcement learning of stochastic gradient algorithms,” J. Mach. Learn. Res., vol. 22, pp. 1–49, Apr. 2021.
|
| [265] |
S. Krishnan, A. Garg, R. Liaw, B. Thananjeyan, L. Miller, F. T. Pokorny, and K. Goldberg, “SWIRL: A sequential windowed inverse reinforcement learning algorithm for robot tasks with delayed rewards,” Int. J. Robot. Res., vol. 38, no. 2-3, pp. 126–145, Mar. 2019. doi: 10.1177/0278364918784350
|
| [266] |
R. S. Dahiya, G. Metta, M. Valle, and G. Sandini, “Tactile sensing-from humans to humanoids,” IEEE Trans. Robot., vol. 26, no. 1, pp. 1–20, Feb. 2010. doi: 10.1109/TRO.2009.2033627
|
| [267] |
Y. H. Jung, B. Park, J. U. Kim, and T.-I. Kim, “Bioinspired electronics for artificial sensory systems,” Adv. Mater., vol. 31, no. 34, p. 1803637, Aug. 2019. doi: 10.1002/adma.201803637
|
| [268] |
M. Soni, M. Bhattacharjee, M. Ntagios, and R. Dahiya, “Printed temperature sensor based on PEDOT: PSS-graphene oxide composite,” IEEE Sensors J., vol. 20, no. 14, pp. 7525–7531, Jul. 2020. doi: 10.1109/JSEN.2020.2969667
|
| [269] |
J. Yan, Y. Ma, X. Li, C. Zhang, M. Cao, W. Chen, S. Luo, M. Zhu, and Y. Gao, “Flexible and high-sensitivity piezoresistive sensor based on MXene composite with wrinkle structure,” Ceram. Int., vol. 46, no. 15, pp. 23592–23598, Oct. 2020. doi: 10.1016/j.ceramint.2020.06.131
|
| [270] |
S. Chitta, E. G. Jones, M. Ciocarlie, and K. Hsiao, “Mobile manipulation in unstructured environments: Perception, planning, and execution,” IEEE Robot. Autom. Mag., vol. 19, no. 2, pp. 58–71, Jun. 2012. doi: 10.1109/MRA.2012.2191995
|
| [271] |
S. Elliott, M. Valente, and M. Cakmak, “Making objects graspable in confined environments through push and pull manipulation with a tool,” in Proc. IEEE Int. Conf. Robotics and Automation, Stockholm, Sweden, 2016, pp. 4851–4858.
|
| [272] |
D. Lee and Y. Nakamura, “Mimesis scheme using a monocular vision system on a humanoid robot,” in Proc. IEEE Int. Conf. Robotics and Automation, Rome, Italy, 2007, pp. 2162–2168.
|
| [273] |
K. Sabe, M. Fukuchi, J.-S. Gutmann, T. Ohashi, K. Kawamoto, and T. Yoshigahara, “Obstacle avoidance and path planning for humanoid robots using stereo vision,” in Proc. IEEE Int. Conf. Robotics and Automation, New Orleans, USA, 2004, pp. 592–597.
|
| [274] |
J. Schulman, Y. Duan, J. Ho, A. Lee, I. Awwal, H. Bradlow, J. Pan, S. Patil, K. Goldberg, and P. Abbeel, “Motion planning with sequential convex optimization and convex collision checking,” Int. J. Robot. Res., vol. 33, no. 9, pp. 1251–1270, Aug. 2014. doi: 10.1177/0278364914528132
|
| [275] |
N. Perrin, O. Stasse, L. Baudouin, F. Lamiraux, and E. Yoshida, “Fast humanoid robot collision-free footstep planning using swept volume approximations,” IEEE Trans. Robot., vol. 28, no. 2, pp. 427–439, Apr. 2012. doi: 10.1109/TRO.2011.2172152
|
| [276] |
H.-W. Park, A. Ramezani, and J. W. Grizzle, “A finite-state machine for accommodating unexpected large ground-height variations in bipedal robot walking,” IEEE Trans. Robot., vol. 29, no. 2, pp. 331–345, Apr. 2013. doi: 10.1109/TRO.2012.2230992
|
| [277] |
T. Morita, K. Mase, Y. Hirano, and S. Kajita, “Reciprocal attentive communication in remote meeting with a humanoid robot,” in Proc. 9th Int. Conf. Multimodal Interfaces, Nagoya Aichi, Japan, 2007, pp. 228–235.
|
| [278] |
J.-S. Gutmann, M. Fukuchi, and M. Fujita, “A floor and obstacle height map for 3D navigation of a humanoid robot,” in Proc. IEEE Int. Conf. Robotics and Automation, Barcelona, Spain, 2005, pp. 1066–1071.
|
| [279] |
H. Zhang and E. So, “Hybrid resistive tactile sensing,” IEEE Trans. Syst. Man Cybern. Part B (Cybern.), vol. 32, no. 1, pp. 57–65, Feb. 2002. doi: 10.1109/3477.979960
|
| [280] |
P. A. Schmidt, E. Maël, and R. P. Würtz, “A sensor for dynamic tactile information with applications in human-robot interaction and object exploration,” Robot. Auton. Syst., vol. 54, no. 12, pp. 1005–1014, Dec. 2006. doi: 10.1016/j.robot.2006.05.013
|
| [281] |
C. H. Lee, C. G. Park, H. S. Lee, J. G. Lee, C. W. Jeon, M. K. Kim, W. Kwon, Y. M. Yoo, J. I. Kim, and G. B. Moon, “Development of indoor navigation system for humanoid robot using multi-sensors integration,” in Proc. Nat. Technical Meeting Institute-of-Navigation, San Diego, USA, 2007, pp. 798–805.
|
| [282] |
T. Dutta and G. R. Fernie, “Utilization of ultrasound sensors for anti-collision systems of powered wheelchairs,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 13, no. 1, pp. 24–32, Mar. 2005. doi: 10.1109/TNSRE.2004.842366
|
| [283] |
F. Abrate, B. Bona, and M. Indri, “Monte Carlo localization of mini-rovers with low-cost IR sensors,” in Proc. IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics, Zurich, Switzerland, 2007, pp. 768–773.
|
| [284] |
H. H. Cheng, B. D. Shaw, J. Palen, J. E. Larson, X. Hu, and K. Van Katwyk, “A real-time laser-based detection system for measurement of delineations of moving vehicles,” IEEE/ASME Trans. Mechatron., vol. 6, no. 2, pp. 170–187, Jun. 2001. doi: 10.1109/3516.928732
|
| [285] |
O. Duran, K. Althoefer, and L. D. Seneviratne, “Pipe inspection using a laser-based transducer and automated analysis techniques,” IEEE/ASME Trans. Mechatron., vol. 8, no. 3, pp. 401–409, Sept. 2003. doi: 10.1109/TMECH.2003.816809
|
| [286] |
D. Goger, N. Gorges, and H. Worn, “Tactile sensing for an anthropomorphic robotic hand: Hardware and signal processing,” in Proc. IEEE Int. Conf. Robotics and Automation, Kobe, Japan, 2009, pp. 2972–2978.
|
| [287] |
N. F. Lepora, C. Ford, A. Stinchcombe, A. Brown, J. Lloyd, M. G. Catalano, M. Bianchi, and B. Ward-Cherrier, “Towards integrated tactile sensorimotor control in anthropomorphic soft robotic hands,” in Proc. IEEE Int. Conf. Robotics and Automation, Xi’an, China, 2021, pp. 1622–1628.
|
| [288] |
T.-H. Chang, Y. Tian, C. Li, X. Gu, K. Li, H. Yang, P. Sanghani, C. M. Lim, H. Ren, and P.-Y. Chen, “Stretchable graphene pressure sensors with Shar-Pei-like hierarchical wrinkles for collision-aware surgical robotics,” ACS Appl. Mater. Interfaces, vol. 11, no. 10, pp. 10226–10236, Feb. 2019. doi: 10.1021/acsami.9b00166
|
| [289] |
M. Prats, P. J. Sanz, and A. P. del Pobil, “Vision-tactile-force integration and robot physical interaction,” in Proc. IEEE Int. Conf. Robotics and Automation, Kobe, Japan, 2009, pp. 2118–2123.
|
| [290] |
Q. Li, R. Haschke, and H. Ritter, “A visuo-tactile control framework for manipulation and exploration of unknown objects,” in Proc. IEEE-RAS 15th Int. Conf. Humanoid Robots, Seoul, South Korea, 2015, pp. 610–615.
|
| [291] |
Y. Yoon, W.-R. Ko, M. Jang, J. Lee, J. Kim, and G. Lee, “Robots learn social skills: End-to-end learning of Co-speech gesture generation for humanoid robots,” in Proc. Int. Conf. Robotics and Automation, Montreal, Canada, 2019, pp. 4303–4309.
|
| [292] |
H. Modares, I. Ranatunga, F. L. Lewis, and D. O. Popa, “Optimized assistive human-robot interaction using reinforcement learning,” IEEE Trans. Cybern., vol. 46, no. 3, pp. 655–667, Mar. 2016. doi: 10.1109/TCYB.2015.2412554
|
| [293] |
A. L. Shoushtari, P. Dario, and S. Mazzoleni, “A review on the evolvement trend of robotic interaction control,” Ind. Robot, vol. 43, no. 5, pp. 535–551, Aug. 2016. doi: 10.1108/IR-02-2016-0073
|
| [294] |
H. Huang, C. Yang, and C. L. P. Chen, “Optimal robot-environment interaction under broad fuzzy neural adaptive control,” IEEE Trans. Cybern., vol. 51, no. 7, pp. 3824–3835, Jul. 2021. doi: 10.1109/TCYB.2020.2998984
|
| [295] |
J. Baltes, K.-Y. Tu, S. Sadeghnejad, and J. Anderson, “HuroCup: Competition for multi-event humanoid robot athletes,” Knowl. Eng. Rev., vol. 32, p. e1, 2017. doi: 10.1017/S0269888916000114
|
| [296] |
E. Krotkov, D. Hackett, L. Jackel, M. Perschbacher, J. Pippine, J. Strauss, G. Pratt, and C. Orlowski, “The DARPA robotics challenge finals: Results and perspectives,” J. Field Robot., vol. 34, no. 2, pp. 229–240, Mar. 2017. doi: 10.1002/rob.21683
|
| [297] |
J. Anderson, J. Baltes, and C. T. Cheng, “Robotics competitions as benchmarks for AI research,” Knowl. Eng. Rev., vol. 26, no. 1, pp. 11–17, Feb. 2011. doi: 10.1017/S0269888910000354
|
| [298] |
T. B. Martin, R. O. Ambrose, M. A. Diftler, R. Platt, and M. J. Butzer, “Tactile gloves for autonomous grasping with the NASA/DARPA robonaut,” in Proc. IEEE Int. Conf. Robotics and Automation, New Orleans, USA, 2004, pp. 1713-1718.
|
| [299] |
C. G. Atkeson, B. P. W. Babu, N. Banerjee, D. Berenson, C. P. Bove, X. Cui, M. DeDonato, R. Du, S. Feng, P. Franklin, M. Gennert, J. P. Graff, P. He, A. Jaeger, J. Kim, K. Knoedler, L. Li, C. Liu, X. Long, T. Padir, F. Polido, G. G. Tighe, and X. Xinjilefu, “No falls, no resets: Reliable humanoid behavior in the DARPA robotics challenge,” in Proc. IEEE-RAS 15th Int. Conf. Humanoid Robots, Seoul, South Korea, 2015, pp. 623–630.
|
| [300] |
M. DeDonato, V. Dimitrov, R. Du, R. Giovacchini, K. Knoedler, X. Long, F. Polido, M. A. Gennert, T. Padır, S. Feng, H. Moriguchi, E. Whitman, X. Xinjilefu, and C. G. Atkeson, “Human-in-the-loop control of a humanoid robot for disaster response: A report from the DARPA robotics challenge trials,” J. Field Robot., vol. 32, no. 2, pp. 275–292, Mar. 2015. doi: 10.1002/rob.21567
|
| [301] |
R. Latikka, T. Turja, and A. Oksanen, “Self-efficacy and acceptance of robots,” Comput. Hum. Behav., vol. 93, pp. 157–163, Apr. 2019. doi: 10.1016/j.chb.2018.12.017
|
| [302] |
M. Andtfolk, L. Nyholm, H. Eide, and L. Fagerstrom, “Humanoid robots in the care of older persons: A scoping review,” Assistive Technol., vol. 34, no. 5, pp. 518–526, Sept. 2022. doi: 10.1080/10400435.2021.1880493
|
| [303] |
A. Fan, L. Wu, L. Miao, and A. S. Manila, “When does technology anthropomorphism help alleviate customer dissatisfaction after a service failure? – The moderating role of consumer technology self-efficacy and interdependent self-construal,” J. Hospitality Mark. Manage., vol. 29, no. 3, pp. 269–290, Apr. 2020. doi: 10.1080/19368623.2019.1639095
|
| [304] |
I. Papadopoulos, C. Koulouglioti, R. Lazzarino, and S. Ali, “Enablers and barriers to the implementation of socially assistive humanoid robots in health and social care: A systematic review,” BMJ Open, vol. 10, no. 1, p. e033096, 2020. doi: 10.1136/bmjopen-2019-033096
|
| [305] |
M. Mende, M. L. Scott, J. van Doorn, D. Grewal, and I. Shanks, “Service robots rising: How humanoid robots influence service experiences and elicit compensatory consumer responses,” J. Mark. Res., vol. 56, no. 4, pp. 535–556, Aug. 2019. doi: 10.1177/0022243718822827
|
| [306] |
S. Choi, A. S. Mattila, and L. E. Bolton, “To err is human(-oid): How do consumers react to robot service failure and recovery?” J. Ser. Res., vol. 24, no. 3, pp. 354–371, Aug. 2021. doi: 10.1177/1094670520978798
|
| [307] |
J. Hemminahaus and S. Kopp, “Towards adaptive social behavior generation for assistive robots using reinforcement learning,” in Proc. 12th ACM/IEEE Int. Conf. Human-Robot Interaction, Vienna, Austria, 2017, pp. 332–340.
|
| [308] |
M. M. E. van Pinxteren, R. W. H. Wetzels, J. Rüger, M. Pluymaekers, and M. Wetzels, “Trust in humanoid robots: Implications for services marketing,” J. Ser. Mark., vol. 33, no. 4, pp. 507–518, Jul. 2019. doi: 10.1108/JSM-01-2018-0045
|
| [309] |
D. H. Zhu and Y. P. Chang, “Robot with humanoid hands cooks food better? Effect of robotic chef anthropomorphism on food quality prediction,” Int. J. Contemp. Hospitality Manage., vol. 32, no. 3, pp. 1367–1383, Apr. 2020. doi: 10.1108/IJCHM-10-2019-0904
|
| [310] |
V. Yoganathan, V.-S. Osburg, W. H. Kunz, and W. Toporowski, “Check-in at the Robo-desk: Effects of automated social presence on social cognition and service implications,” Tourism Manage., vol. 85, p. 104309, Aug. 2021. doi: 10.1016/j.tourman.2021.104309
|
| [311] |
A. Asghar, A. Patra, and K. S. Ravi, “The potential scope of a humanoid robot in anatomy education: A review of a unique proposal,” Surg. Radiol. Anat., vol. 44, no. 10, pp. 1309–1317, Sept. 2022. doi: 10.1007/s00276-022-03020-8
|
| [312] |
L. Chen, P. Chen, and Z. Lin, “Artificial intelligence in education: A review,” IEEE Access, vol. 8, pp. 75264–75278, Apr. 2020. doi: 10.1109/ACCESS.2020.2988510
|
| [313] |
A. Dante, C. La Cerra, V. Masotta, V. Caponnetto, L. Bertocchi, A. Marcotullio, F. Ferraiuolo, C. M. Alfes, and C. Petrucci, “The use of robotics to enhance learning in nursing education: A scoping review,” in Methodologies and Intelligent Systems for Technology Enhanced Learning, 11th International Conference, F. De la Prieta, R. Gennari, M. Temperini, T. Di Mascio, P. Vittorini, Z. Kubincova, E. Popescu, D. R. Carneiro, L. Lancia, and A. Addone, Eds. Cham, Germany: Springer, 2022, pp. 217–226.
|
| [314] |
Y. Lau, D. G. H. Chee, X. P. Chow, S. H. Wong, L. J. Cheng, and S. T. Lau, “Humanoid robot-assisted interventions among children with diabetes: A systematic scoping review,” Int. J. Nurs. Stud., vol. 111, p. 103749, Nov. 2020. doi: 10.1016/j.ijnurstu.2020.103749
|
| [315] |
J. Dawe, C. Sutherland, A. Barco, and E. Broadbent, “Can social robots help children in healthcare contexts? A scoping review,” BMJ Paediatr. Open, vol. 3, no. 1, p. e000371, Jan. 2019. doi: 10.1136/bmjpo-2018-000371
|
| [316] |
G. Zambella, R. Schuller, G. Mesesan, A. Bicchi, C. Ott, and J. Lee, “Agile and dynamic standing-up control for humanoids using 3D divergent component of motion in multi-contact scenario,” IEEE Robot. Autom. Lett., vol. 8, no. 9, pp. 5624–5631, Sept. 2023. doi: 10.1109/LRA.2023.3297060
|
| [317] |
P. Sun, Y. Gu, H. Mao, Z. Chen, and Y. Li, “Research on walking gait planning and simulation of a novel hybrid biped robot,” Biomimetics, vol. 8, no. 2, p. 258, Jun. 2023. doi: 10.3390/biomimetics8020258
|
| [318] |
Y. Lee and T.-W. Lee, “Organic synapses for neuromorphic electronics: From brain-inspired computing to sensorimotor nervetronics,” Acc. Chem. Res., vol. 52, no. 4, pp. 964–974, Mar. 2019. doi: 10.1021/acs.accounts.8b00553
|
| [319] |
Y. Chae, J. Jeong, and S. Jo, “Toward brain-actuated humanoid robots: Asynchronous direct control using an EEG-based BCI,” IEEE Trans. Robot., vol. 28, no. 5, pp. 1131–1144, Oct. 2012. doi: 10.1109/TRO.2012.2201310
|
| [320] |
R. Ma, S.-Y. Chou, Y. Xie, and Q. Pei, “Morphological/nanostructural control toward intrinsically stretchable organic electronics,” Chem. Soc. Rev., vol. 48, no. 6, pp. 1741–1786, Jan. 2019. doi: 10.1039/C8CS00834E
|
| [321] |
B. Wang, Z. Wang, Y. Song, W. Zong, L. Zhang, K. Ji, P. Manoonpong, and Z. Dai, “A neural coordination strategy for attachment and detachment of a climbing robot inspired by gecko locomotion,” Cyborg Bionic Syst., vol. 4, p. 8, Feb. 2023. doi: 10.34133/cbsystems.0008
|
| [322] |
J. A. Reggia, G. E. Katz, and G. P. Davis, “Humanoid cognitive robots that learn by imitating: Implications for consciousness studies,” Front. Robot. AI, vol. 5, p. 1, Jan. 2018. doi: 10.3389/frobt.2018.00001
|
| [323] |
G. Feng, J. Jiang, Y. Zhao, S. Wang, B. Liu, K. Yin, D. Niu, X. Li, Y. Chen, H. Duan, J. Yang, J. He, Y. Gao, and Q. Wan, “A sub-10 nm vertical organic/inorganic hybrid transistor for pain-perceptual and sensitization-regulated nociceptor emulation,” Adv. Mater., vol. 32, no. 6, p. 1906171, Feb. 2020. doi: 10.1002/adma.201906171
|
| [324] |
S. Chun, W. Son, H. Kim, S. K. Lim, C. Pang, and C. Choi, “Self-powered pressure- and vibration-sensitive tactile sensors for learning technique-based neural finger skin,” Nano Lett., vol. 19, no. 5, pp. 3305–3312, Apr. 2019. doi: 10.1021/acs.nanolett.9b00922
|
| [325] |
R. Dahiya, D. Akinwande, and J. S. Chang, “Flexible electronic skin: From humanoids to humans[Scanning the Issue],” Proc. IEEE, vol. 107, no. 10, pp. 2011–2015, Oct. 2019. doi: 10.1109/JPROC.2019.2941665
|
| [326] |
R. Dahiya, “E-skin: From humanoids to humans [Point of View],” Proc. IEEE, vol. 107, no. 2, pp. 247–252, Feb. 2019. doi: 10.1109/JPROC.2018.2890729
|
| [327] |
H. Tang, S. Zhang, Y. Tian, T. Kang, C. Zhou, S. Yang, Y. Liu, X. Liu, Q. Chen, H. Xiao, W. Chen, and J. Zang, “Bioinspired soft elastic metamaterials for reconstruction of natural hearing,” Adv. Sci., vol. 10, no. 20, p. 2207273, Jul. 2023. doi: 10.1002/advs.202207273
|
| [328] |
W. Li, H. Liang, Y. Ao, B. Tang, J. Li, N. Li, J. Wang, and Y. Du, “Biophysical cues of bone marrow-inspired scaffolds regulate hematopoiesis of hematopoietic stem and progenitor cells,” Biomaterials, vol. 298, p. 122111, Jul. 2023. doi: 10.1016/j.biomaterials.2023.122111
|
| [329] |
Z. Cao, Y. Yang, Y. Zheng, W. Wu, F. Xu, R. Wang, and J. Sun, “Highly flexible and sensitive temperature sensors based on Ti3C2Tx (MXene) for electronic skin,” J. Mater. Chem. A, vol. 7, no. 44, pp. 25314–25323, Oct. 2019. doi: 10.1039/C9TA09225K
|
| [330] |
X. Ling, M. I. Osotsi, W. Zhang, Y. Wu, Q. Jin, and D. Zhang, “Bioinspired materials: From distinct dimensional architecture to thermal regulation properties,” J. Bionic Eng., vol. 20, no. 3, pp. 873–899, May 2023. doi: 10.1007/s42235-022-00314-w
|
| [331] |
K. Wan, X. Gou, and Z. Guo, “Bio-inspired fog harvesting materials: Basic research and bionic potential applications,” J. Bionic Eng., vol. 18, no. 3, pp. 501–533, Jun. 2021. doi: 10.1007/s42235-021-0040-0
|
| [332] |
H. Peng, F. Li, J. Liu, and Z. Ju, “A symplectic instantaneous optimal control for robot trajectory tracking with differential-algebraic equation models,” IEEE Trans. Ind. Electron., vol. 67, no. 5, pp. 3819–3829, May 2020. doi: 10.1109/TIE.2019.2916390
|
| [333] |
B. Chen, X. Liu, and S. Tong, “Adaptive fuzzy output tracking control of MIMO nonlinear uncertain systems,” IEEE Trans. Fuzzy Syst., vol. 15, no. 2, pp. 287–300, Apr. 2007. doi: 10.1109/TFUZZ.2006.880008
|
| [334] |
Y. Hu, X. Wu, P. Geng, and Z. Li, “Evolution strategies learning with variable impedance control for grasping under uncertainty,” IEEE Trans. Ind. Electron., vol. 66, no. 10, pp. 7788–7799, Oct. 2019. doi: 10.1109/TIE.2018.2884240
|
| [335] |
F. Ficuciello, A. Migliozzi, G. Laudante, P. Falco, and B. Siciliano, “Vision-based grasp learning of an anthropomorphic hand-arm system in a synergy-based control framework,” Sci. Robot., vol. 4, no. 26, p. eaao4900, Jan. 2019. doi: 10.1126/scirobotics.aao4900
|
| [336] |
S. Saeedvand, H. S. Aghdasi, and J. Baltes, “Robust multi-objective multi-humanoid robots task allocation based on novel hybrid metaheuristic algorithm,” Appl. Intell., vol. 49, no. 12, pp. 4097–4127, Dec. 2019. doi: 10.1007/s10489-019-01475-8
|
| [337] |
K. Bouyarmane, K. Chappellet, J. Vaillant, and A. Kheddar, “Quadratic programming for multirobot and task-space force control,” IEEE Trans. Robot., vol. 35, no. 1, pp. 64–77, Feb. 2019. doi: 10.1109/TRO.2018.2876782
|
| [338] |
R. Saitake and S. Arai, “Parameter estimation of multi-objective reinforcement learning to reach arbitrary Pareto solution,” in Proc. IEEE Int. Conf. Agents, Matsue, Japan, 2016, pp. 110–111.
|
| [339] |
W. Buckel and R. K. Thauer, “Flavin-based electron bifurcation, a new mechanism of biological energy coupling,” Chem. Rev., vol. 118, no. 7, pp. 3862–3886, Mar. 2018. doi: 10.1021/acs.chemrev.7b00707
|
| [340] |
F. Arvin, K. Samsudin, and A. R. Ramli, “Development of IR-based short-range communication techniques for swarm robot applications,” Adv. Electr. Comput. Eng., vol. 10, no. 4, pp. 61–68, Nov. 2010. doi: 10.4316/aece.2010.04010
|
| [341] |
G. A. LePage, “Biological energy transformations during shock as shown by tissue analyses,” Am. J. Physiol., vol. 146, no. 2, pp. 267–281, May 1946. doi: 10.1152/ajplegacy.1946.146.2.267
|
| [342] |
K. R. Foster, “Thermal and nonthermal mechanisms of interaction of radio-frequency energy with biological systems,” IEEE Trans. Plasma Sci., vol. 28, no. 1, pp. 15–23, Feb. 2000. doi: 10.1109/27.842819
|
| [343] |
D. Beljonne, C. Curutchet, G. D. Scholes, and R. J. Silbey, “Beyond förster resonance energy transfer in biological and nanoscale systems,” J. Phys. Chem. B, vol. 113, no. 19, pp. 6583–6599, Mar. 2009. doi: 10.1021/jp900708f
|
| [344] |
S. J. McMahon, W. B. Hyland, M. F. Muir, J. A. Coulter, S. Jain, K. T. Butterworth, G. Schettino, G. R. Dickson, A. R. Hounsell, J. M. O’Sullivan, K. M. Prise, D. G. Hirst, and F. J. Currell, “Biological consequences of nanoscale energy deposition near irradiated heavy atom nanoparticles,” Sci. Rep., vol. 1, no. 1, p. 18, Jun. 2011. doi: 10.1038/srep00018
|
| [345] |
H.-Q. Peng, L.-Y. Niu, Y.-Z. Chen, L.-Z. Wu, C.-H. Tung, and Q.-Z. Yang, “Biological applications of supramolecular assemblies designed for excitation energy transfer,” Chem. Rev., vol. 115, no. 15, pp. 7502–7542, Jun. 2015. doi: 10.1021/cr5007057
|
| [346] |
H. Zhu, W. Luo, P. N. Ciesielski, Z. Fang, J. Y. Zhu, G. Henriksson, M. E. Himmel, and L. Hu, “Wood-derived materials for green electronics, biological devices, and energy applications,” Chem. Rev., vol. 116, no. 16, pp. 9305–9374, Jul. 2016. doi: 10.1021/acs.chemrev.6b00225
|
| [347] |
E. Uslu, F. Çakmak, N. Altuntaş, S. Marangoz, M. F. Amasyalı, and S. Yavuz, “An architecture for multi-robot localization and mapping in the gazebo/robot operating system simulation environment,” Simulation, vol. 93, no. 9, pp. 771–780, Sept. 2017. doi: 10.1177/0037549717710098
|
| [348] |
S. A. Prieto, A. Adán, A. S. Vázquez, and B. Quintana, “Passing through open/closed doors: A solution for 3D scanning robots,” Sensors, vol. 19, no. 21, p. 4740, Oct. 2019. doi: 10.3390/s19214740
|
| [349] |
C. X. Er Shamaine, Y. Qiao, J. Henry, K. McNevin, and N. Murray, “RoSTAR: ROS-based telerobotic control via augmented reality,” in Proc. IEEE 22nd Int. Workshop on Multimedia Signal Processing, Tampere, Finland, 2020, pp. 1–6.
|
| [350] |
H. Kato, D. Hirano, S. Mitani, T. Saito, and S. Kawaguchi, “ROS and cFS system (RACS): Easing space robotic development,” in Proc. IEEE Aerospace Conf., Big Sky, USA, 2021, pp. 1-8.
|
| [351] |
D. Whitney, E. Rosen, D. Ullman, E. Phillips, and S. Tellex, “ROS reality: A virtual reality framework using consumer-grade hardware for ROS-enabled robots,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Madrid, Spain, 2018, pp. 5018–5025.
|
| [352] |
J. Orr and A. Dutta, “Multi-agent deep reinforcement learning for multi-robot applications: A survey,” Sensors, vol. 23, no. 7, p. 3625, Mar. 2023. doi: 10.3390/s23073625
|
| [353] |
T. Fong, C. Thorpe, and C. Baur, “Multi-robot remote driving with collaborative control,” IEEE Trans. Ind. Electron., vol. 50, no. 4, pp. 699–704, Aug. 2003. doi: 10.1109/TIE.2003.814768
|
| [354] |
L. Vig and J. A. Adams, “Multi-robot coalition formation,” IEEE Trans. Robot., vol. 22, no. 4, pp. 637–649, Aug. 2006. doi: 10.1109/TRO.2006.878948
|
| [355] |
Y. Cai, Z. Tang, Y. Ding, and B. Qian, “Theory and application of multi-robot service-oriented architecture,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 1, pp. 15–25, Jan. 2016. doi: 10.1109/JAS.2016.7373758
|
| [356] |
S. Trigui, O. Cheikhrouhou, A. Koubaa, U. Baroudi, and H. Youssef, “FL-MTSP: A fuzzy logic approach to solve the multi-objective multiple traveling salesman problem for multi-robot systems,” Soft Comput., vol. 21, no. 24, pp. 7351–7362, Dec. 2017. doi: 10.1007/s00500-016-2279-7
|
| [357] |
M. Appel, D. Izydorczyk, S. Weber, M. Mara, and T. Lischetzke, “The uncanny of mind in a machine: Humanoid robots as tools, agents, and experiencers,” Comput. Hum. Behav., vol. 102, pp. 274–286, Jan. 2020. doi: 10.1016/j.chb.2019.07.031
|
| [358] |
S. Naneva, M. S. Gou, T. L. Webb, and T. J. Prescott, “A systematic review of attitudes, anxiety, acceptance, and trust towards social robots,” Int. J. Soc. Robot., vol. 12, no. 6, pp. 1179–1201, Dec. 2020. doi: 10.1007/s12369-020-00659-4
|
| [359] |
S. Saunderson and G. Nejat, “Hybrid hierarchical learning for adaptive persuasion in human-robot interaction,” IEEE Robot. Autom. Lett., vol. 7, no. 2, pp. 5520–5527, Apr. 2022. doi: 10.1109/LRA.2022.3140813
|
| [360] |
Z. Zeng, P.-J. Chen, and A. A. Lew, “From high-touch to high-tech: COVID-19 drives robotics adoption,” Tourism Geogr., vol. 22, no. 3, pp. 724–734, May 2020. doi: 10.1080/14616688.2020.1762118
|
| [361] |
A. Edwards, C. Edwards, D. Westerman, and P. R. Spence, “Initial expectations, interactions, and beyond with social robots,” Comput. Hum. Behav., vol. 90, pp. 308–314, Jan. 2019. doi: 10.1016/j.chb.2018.08.042
|
| [362] |
Y. Cha and S. Hong, “Energy harvesting from walking motion of a humanoid robot using a piezoelectric composite,” Smart Mater. Struct., vol. 25, no. 10, p. 10LT01, Sept. 2016. doi: 10.1088/0964-1726/25/10/10LT01
|
| [363] |
W.-Y. Li, H. Nabae, G. Endo, and K. Suzumori, “New soft robot hand configuration with combined biotensegrity and thin artificial muscle,” IEEE Robot. Autom. Lett., vol. 5, no. 3, pp. 4345–4351, Jul. 2020. doi: 10.1109/LRA.2020.2983668
|
| [364] |
M. Kawai, M. Nie, H. Oda, Y. Morimoto, and S. Takeuchi, “Living skin on a robot,” Matter, vol. 5, no. 7, pp. 2190–2208, Jul. 2022. doi: 10.1016/j.matt.2022.05.019
|
| [365] |
J. Long, J. Li, Y. Lu, C. Zhou, G. Lu, and Y. Feng, “Shape-changing robotic mannequin shoulder with bio-inspired layered structure,” IEEE Robot. Autom. Lett., vol. 8, no. 8, pp. 5172–5179, Aug. 2023. doi: 10.1109/LRA.2023.3293753
|
| [366] |
X. Zhang, N. Sun, G. Liu, T. Yang, and Y. Fang, “Hysteresis compensation-based intelligent control for pneumatic artificial muscle-driven humanoid robot manipulators with experiments verification,” IEEE Trans. Autom. Sci. Eng., 2023. DOI: 10.1109/TASE.2023.3263535
|
| [367] |
P. Mittendorfer and G. Cheng, “Humanoid multimodal tactile-sensing modules,” IEEE Trans. Robot., vol. 27, no. 3, pp. 401–410, Jun. 2011. doi: 10.1109/TRO.2011.2106330
|
| [368] |
M. Fridin, “Kindergarten social assistive robot: First meeting and ethical issues,” Comput. Hum. Behav., vol. 30, pp. 262–272, Jan. 2014. doi: 10.1016/j.chb.2013.09.005
|
| [369] |
D. Vanderelst and A. Winfield, “An architecture for ethical robots inspired by the simulation theory of cognition,” Cognit. Syst. Res., vol. 48, pp. 56–66, May 2018. doi: 10.1016/j.cogsys.2017.04.002
|
| [370] |
J. Fox and A. Gambino, “Relationship development with humanoid social robots: Applying interpersonal theories to human-robot interaction,” Cyberpsychol.,Behav.,Soc. Netw., vol. 24, no. 5, pp. 294–299, May 2021. doi: 10.1089/cyber.2020.0181
|
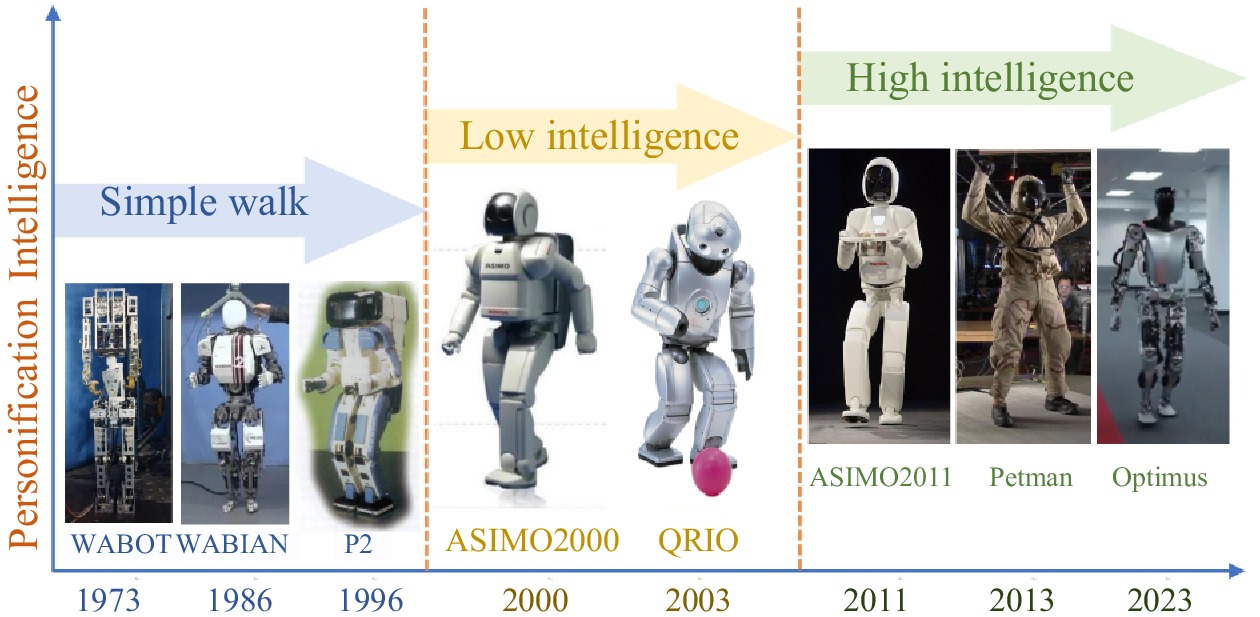
Figures(7) / Tables(5)






 DownLoad:
DownLoad: