A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 2
Volume 11
Issue 2
IEEE/CAA Journal of Automatica Sinica
| Citation: | Y. Zhu, N. Xu, F. Wu, X. Chen, and D. Zhou, “Fault estimation for a class of Markov jump piecewise-affine systems: Current feedback based iterative learning approach,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 418–429, Feb. 2024. doi: 10.1109/JAS.2023.123990

|
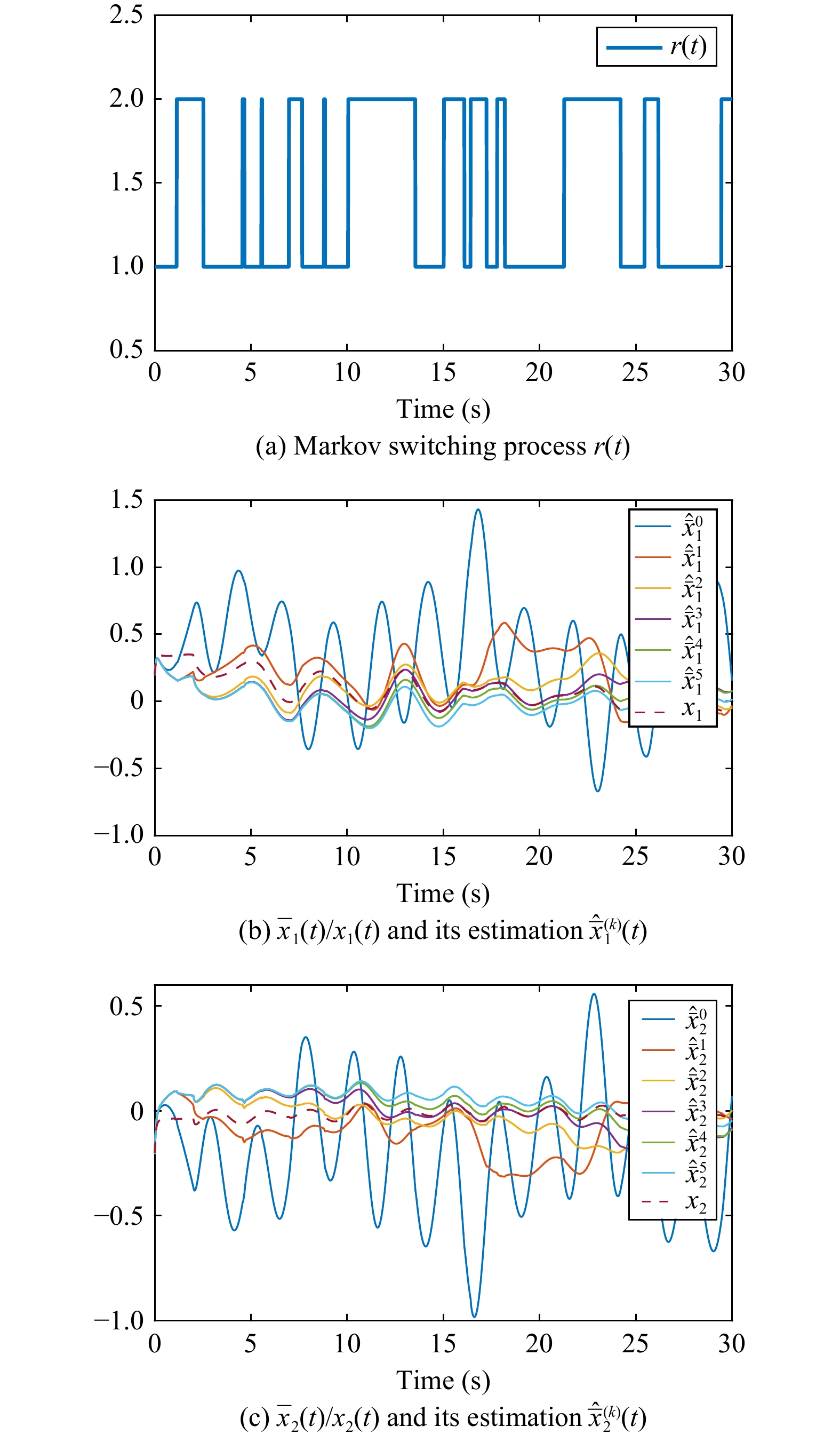
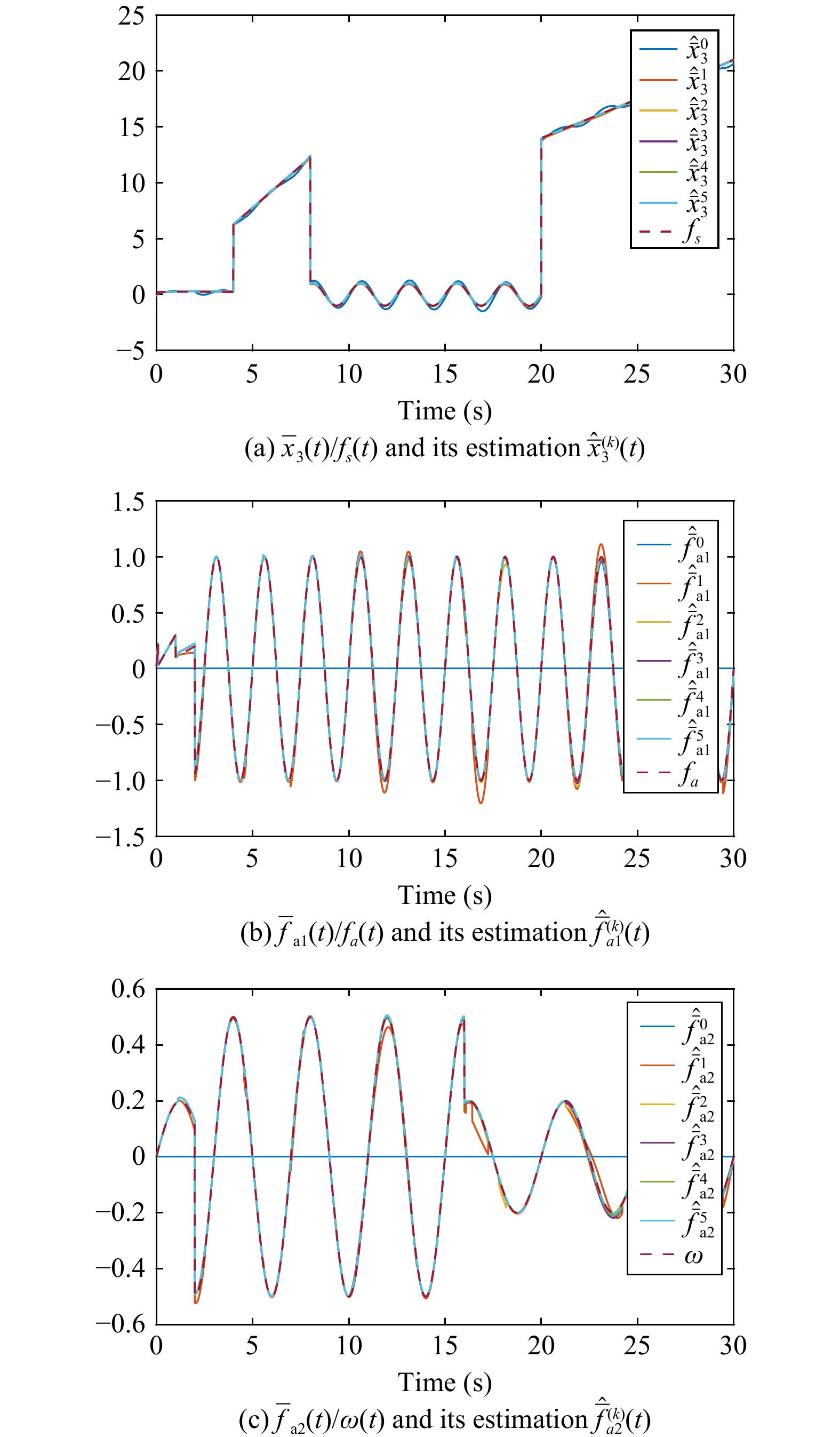
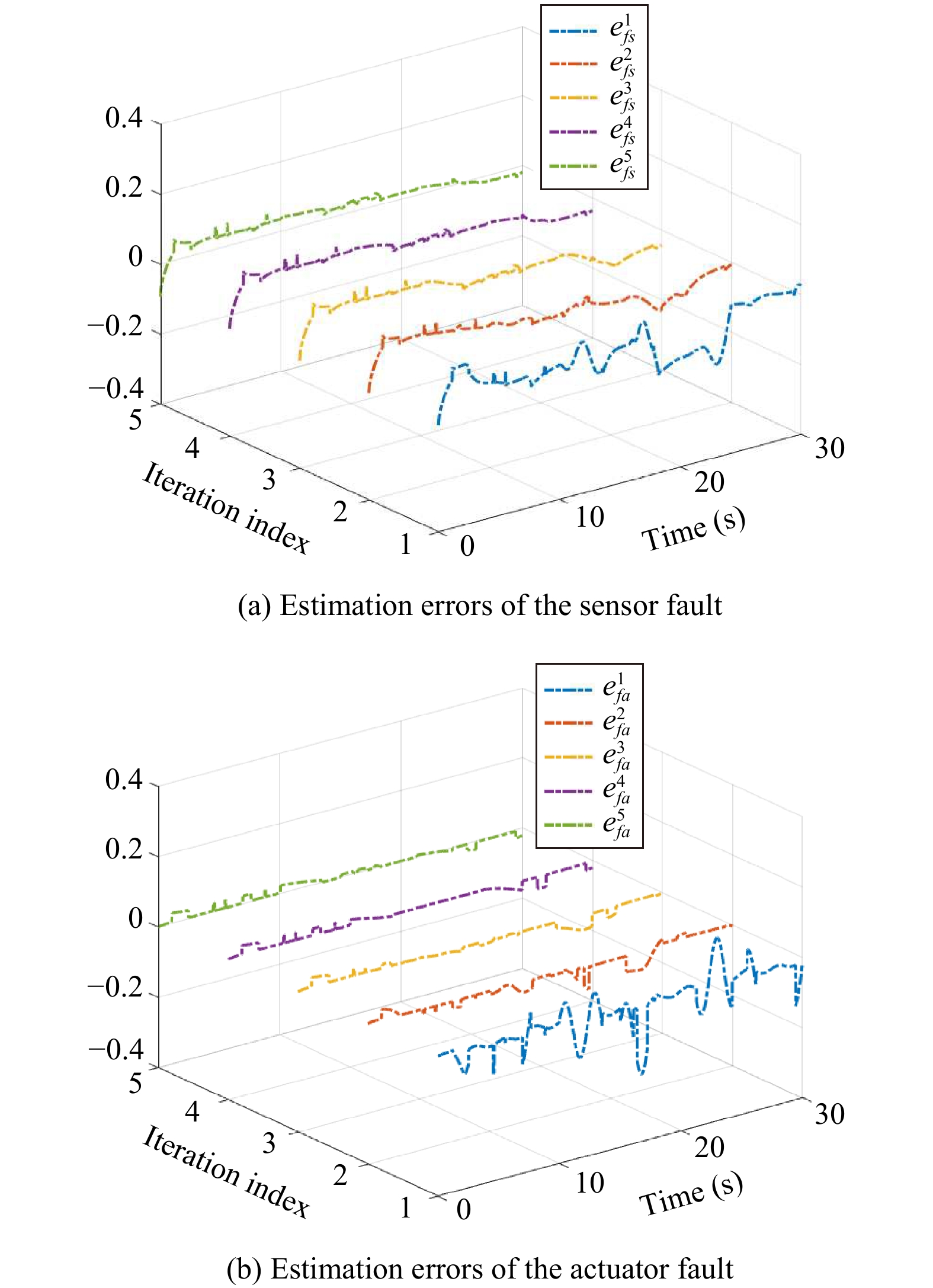
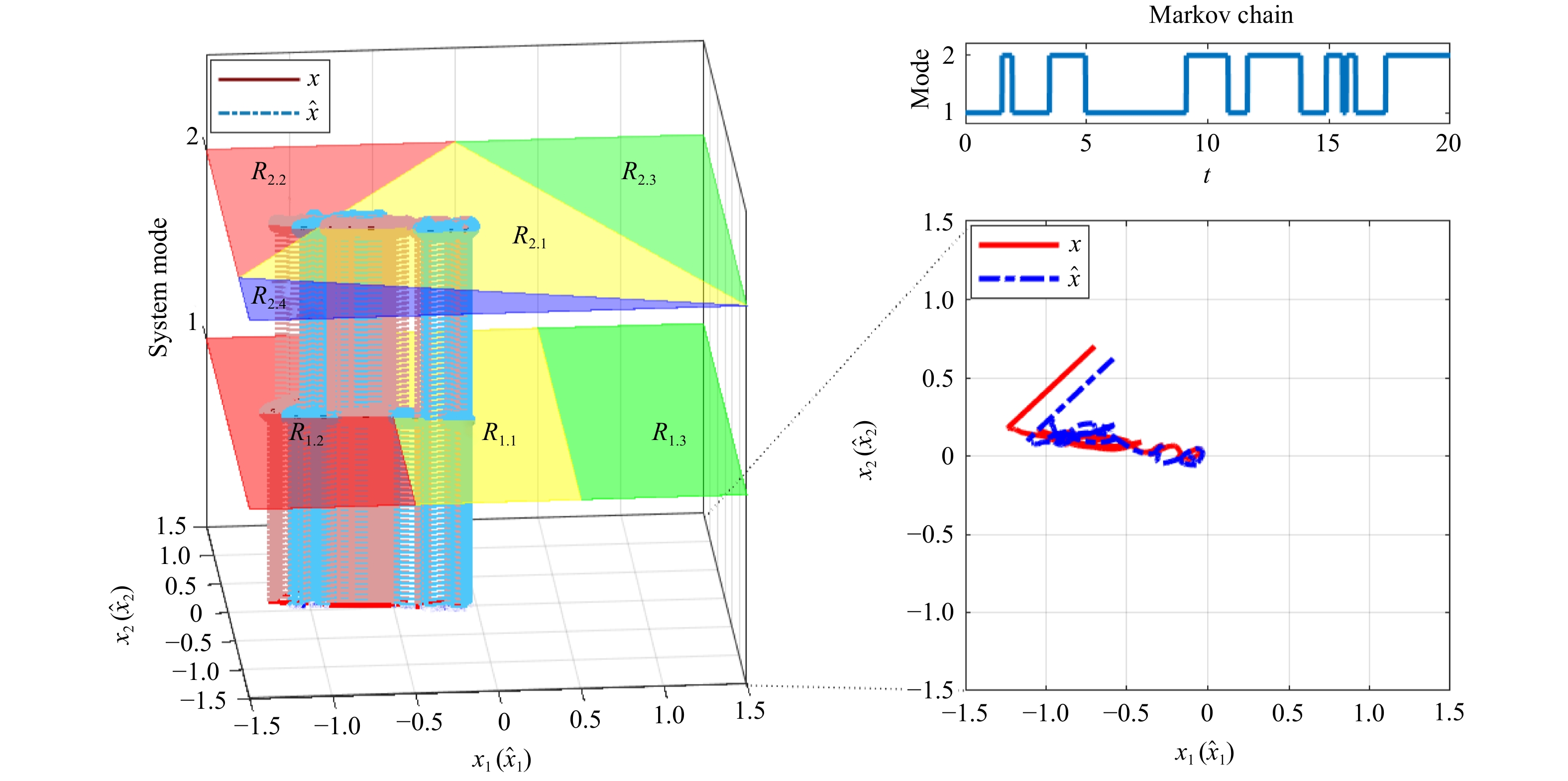
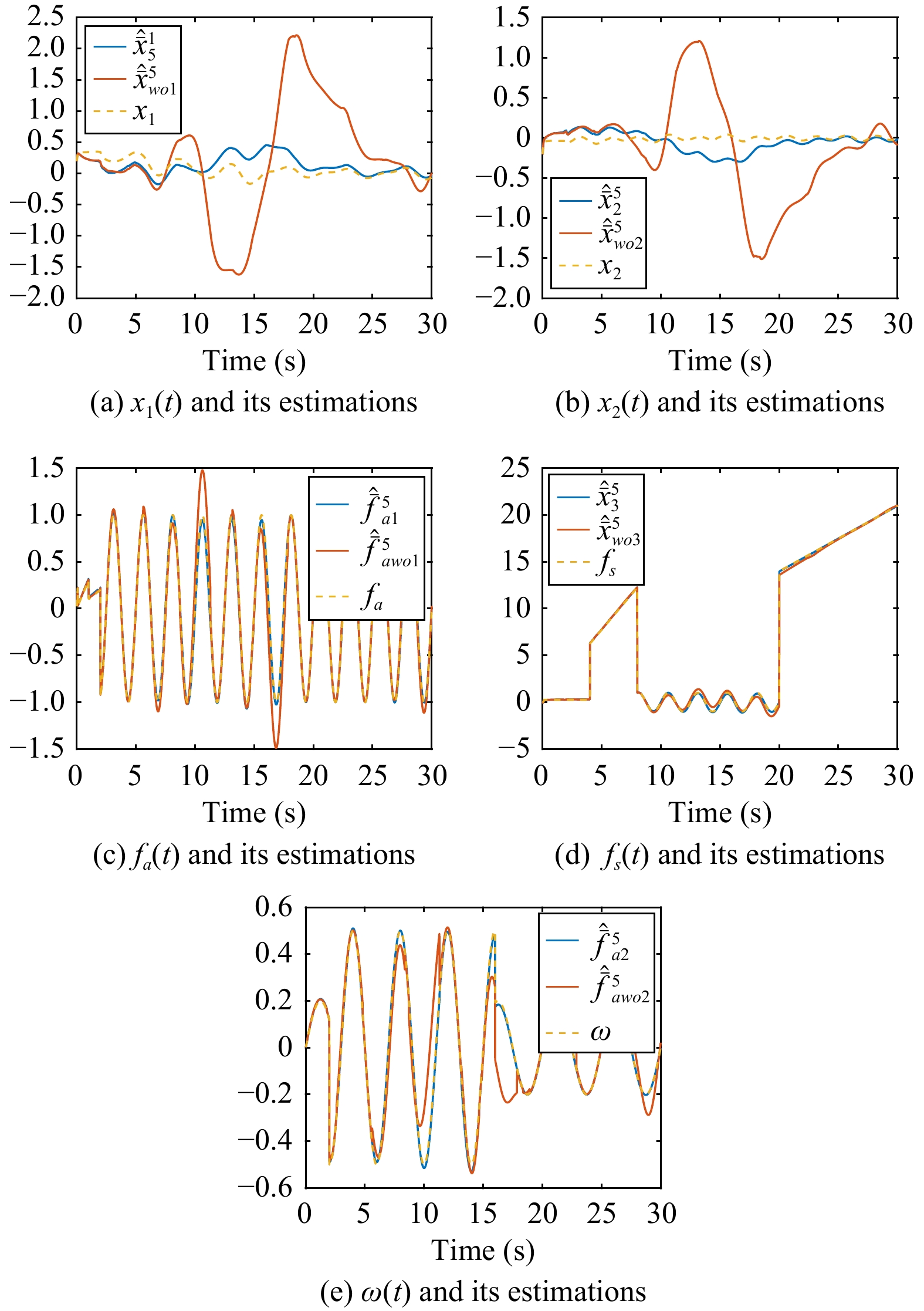
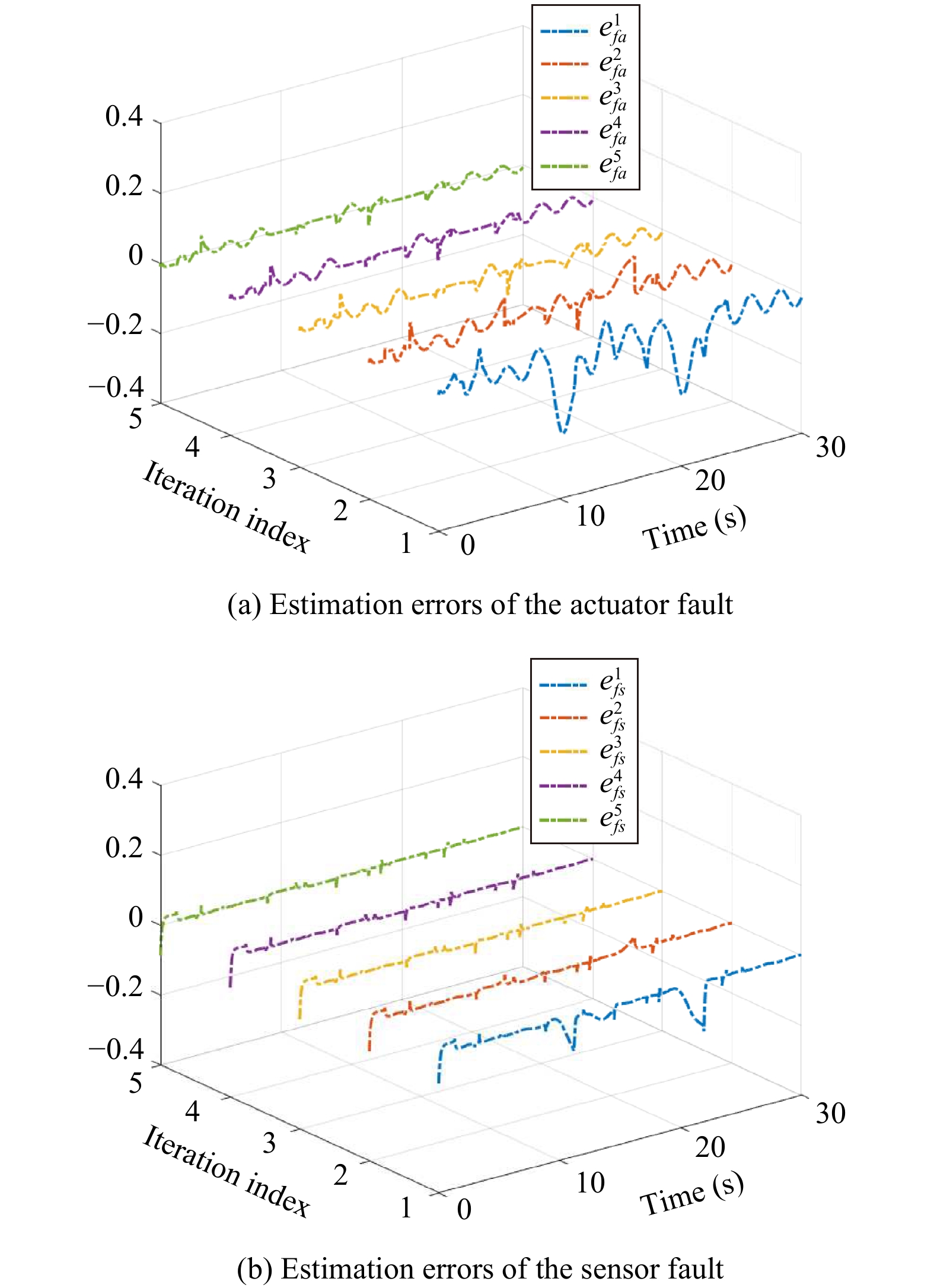
In this paper, the issues of stochastic stability analysis and fault estimation are investigated for a class of continuous-time Markov jump piecewise-affine (PWA) systems against actuator and sensor faults. Firstly, a novel mode-dependent PWA iterative learning observer with current feedback is designed to estimate the system states and faults, simultaneously, which contains both the previous iteration information and the current feedback mechanism. The auxiliary feedback channel optimizes the response speed of the observer, therefore the estimation error would converge to zero rapidly. Then, sufficient conditions for stochastic stability with guaranteed
performance are demonstrated for the estimation error system, and the equivalence relations between the system information and the estimated information can be established via iterative accumulating representation. Finally, two illustrative examples containing a class of tunnel diode circuit systems are presented to fully demonstrate the effectiveness and superiority of the proposed iterative learning observer with current feedback.

| [1] |
L. Chen, P. Shi, and M. Liu, “Fault reconstruction for Markovian jump systems with iterative adaptive observer,” Automatica, vol. 105, pp. 254–263, Jul. 2019. doi: 10.1016/j.automatica.2019.03.008
|
| [2] |
Y. Ju, D. Ding, X. He, Q.-L. Han, and G. Wei, “Consensus control of multi-agent systems using fault-estimation-in-the-loop: Dynamic event-triggered case,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1440–1451, Aug. 2022. doi: 10.1109/JAS.2021.1004386
|
| [3] |
M. Hashemi and C. P. Tan, “Integrated fault estimation and fault tolerant control for systems with generalized sector input nonlinearity,” Automatica, vol. 119, p. 109098, Sept. 2020. doi: 10.1016/j.automatica.2020.109098
|
| [4] |
J. Lan, “Asymptotic estimation of state and faults for linear systems with unknown perturbations,” Automatica, vol. 118, p. 108955, Aug. 2020. doi: 10.1016/j.automatica.2020.108955
|
| [5] |
E. Mousavinejad, X. Ge, Q.-L. Han, T. J. Lim, and L. Vlacic, “An ellipsoidal set-membership approach to distributed joint state and sensor fault estimation of autonomous ground vehicles,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 6, pp. 1107–1118, Jun. 2021. doi: 10.1109/JAS.2021.1004015
|
| [6] |
Y. Xu, H. Yang, B. Jiang, and M. M. Polycarpou, “Distributed optimal fault estimation and fault-tolerant control for interconnected systems: A stackelberg differential graphical game approach,” IEEE Trans. Automat. Control, vol. 67, no. 2, pp. 926–933, Feb. 2022. doi: 10.1109/TAC.2021.3074284
|
| [7] |
J. Yang, Z. Ning, Y. Zhu, L. Zhang, and H. K. Lam, “Semi-Markov jump linear systems with bi-boundary sojourn time: Anti-modal-asynchrony control,” Automatica, vol. 140, p. 110270, Jun. 2022. doi: 10.1016/j.automatica.2022.110270
|
| [8] |
Z. Zhang and X. He, “Fault detection and isolation for linear parameter-varying systems with time-delays: A geometric approach,” Sci. China Inf. Sci., vol. 66, no. 7, p. 172202, Jul. 2023. doi: 10.1007/s11432-022-3632-2
|
| [9] |
Y. Tian, Y. Chai, L. Feng, and K. Zhang, “Fault estimator design based on an iterative-learning scheme according to the forgetting factor for nonlinear systems,” Sci. China Inf. Sci., vol. 66, no. 7, p. 179201, Jul. 2023. doi: 10.1007/s11432-021-3342-3
|
| [10] |
K. Zhang, B. Jiang, and F. Chen, “Multiple-model-based diagnosis of multiple faults with high-speed train applications using second-level adaptation,” IEEE Trans. Ind. Electron., vol. 68, no. 7, pp. 6257–6266, Jul. 2021. doi: 10.1109/TIE.2020.2994867
|
| [11] |
X. Liu, Z. Gao, and M. Z. Q. Chen, “Takagi-sugeno fuzzy model based fault estimation and signal compensation with application to wind turbines,” IEEE Trans. Ind. Electron., vol. 64, no. 7, pp. 5678–5689, Jul. 2017. doi: 10.1109/TIE.2017.2677327
|
| [12] |
H. Yang and S. Yin, “Actuator and sensor fault estimation for time-delay Markov jump systems with application to wheeled mobile manipulators,” IEEE Trans. Ind. Inf., vol. 16, no. 5, pp. 3222–3232, May 2020. doi: 10.1109/TII.2019.2915668
|
| [13] |
X. Liu, Z. Gao, and A. Zhang, “Observer-based fault estimation and tolerant control for stochastic Takagi-Sugeno fuzzy systems with Brownian parameter perturbations,” Automatica, vol. 102, pp. 137–149, Apr. 2019. doi: 10.1016/j.automatica.2018.12.031
|
| [14] |
H. Li, H. Gao, P. Shi, and X. Zhao, “Fault-tolerant control of Markovian jump stochastic systems via the augmented sliding mode observer approach,” Automatica, vol. 50, no. 7, pp. 1825–1834, Jul. 2014. doi: 10.1016/j.automatica.2014.04.006
|
| [15] |
S. Yin, H. Yang, and O. Kaynak, “Sliding mode observer-based FTC for Markovian jump systems with actuator and sensor faults,” IEEE Trans. Automat. Control, vol. 62, no. 7, pp. 3551–3558, Jul. 2017. doi: 10.1109/TAC.2017.2669189
|
| [16] |
J. H. Lee, K. S. Lee, and W. C. Kim, “Model-based iterative learning control with a quadratic criterion for time-varying linear systems,” Automatica, vol. 36, no. 5, pp. 641–657, May 2000. doi: 10.1016/S0005-1098(99)00194-6
|
| [17] |
M. Zheng, F. Zhang, and X. Liang, “A systematic design framework for iterative learning control with current feedback,” IFAC J. Syst. Control, vol. 5, pp. 1–10, Sept. 2018. doi: 10.1016/j.ifacsc.2018.06.001
|
| [18] |
J. Shi, X. He, and D. Zhou, “Iterative learning based estimation of periodically occurring faults,” IET Control Theory Appl., vol. 10, no. 2, pp. 244–251, Jan. 2016. doi: 10.1049/iet-cta.2015.0791
|
| [19] |
L. Feng, S. Xu, Y. Chai, and K. Zhang, “Iterative learning scheme-based fault estimation design for nonlinear systems with varying trial lengths and specified constraints,” Int. J. Robust Nonlinear Control, vol. 28, no. 16, pp. 4850–4864, Nov. 2018. doi: 10.1002/rnc.4287
|
| [20] |
L. Yao, J. Qin, H. Wang, and B. Jiang, “Design of new fault diagnosis and fault tolerant control scheme for non-Gaussian singular stochastic distribution systems,” Automatica, vol. 48, no. 9, pp. 2305–2313, Sept. 2012. doi: 10.1016/j.automatica.2012.06.036
|
| [21] |
L. Chen, Y. Zhu, F. Wu, and Y. Zhao, “Fault estimation observer design for Markovian jump systems with nondifferentiable actuator and sensor failures,” IEEE Trans. Cybern., vol. 53, no. 6, pp. 3844–3858, Jun. 2023. doi: 10.1109/TCYB.2022.3169290
|
| [22] |
L. Liu, L. Ma, J. Zhang, and Y. Bo, “Sliding mode control for nonlinear Markovian jump systems under denial-of-service attacks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 6, pp. 1638–1648, Nov. 2020. doi: 10.1109/JAS.2019.1911531
|
| [23] |
S. Dong, Z.-G. Wu, H. Su, P. Shi, and H. R. Karimi, “Asynchronous control of continuous-time nonlinear Markov jump systems subject to strict dissipativity,” IEEE Trans. Automat. Control, vol. 64, no. 3, pp. 1250–1256, Mar. 2019. doi: 10.1109/TAC.2018.2846594
|
| [24] |
S. Dong, Z.-G. Wu, P. Shi, H. Su, and T. Huang, “Quantized control of Markov jump nonlinear systems based on fuzzy hidden Markov model,” IEEE Trans. Cybern., vol. 49, no. 7, pp. 2420–2430, Jul. 2019. doi: 10.1109/TCYB.2018.2813279
|
| [25] |
H. Li, P. Shi, and D. Yao, “Adaptive sliding-mode control of Markov jump nonlinear systems with actuator faults,” IEEE Trans. Automat. Control, vol. 62, no. 4, pp. 1933–1939, Apr. 2017. doi: 10.1109/TAC.2016.2588885
|
| [26] |
G. Feng, “Stability analysis of piecewise discrete-time linear systems,” IEEE Trans. Automat. Control, vol. 47, no. 7, pp. 1108–1112, Jul. 2002. doi: 10.1109/TAC.2002.800666
|
| [27] |
C. Li, X. Liao, and X. Yang, “Switch control for piecewise affine chaotic systems,” Chaos, vol. 16, no. 3, p. 033104, Sept. 2006. doi: 10.1063/1.2213676
|
| [28] |
R. Iervolino, D. Tangredi, and F. Vasc, “Lyapunov stability for piecewise affine systems via cone-copositivity,” Automatica, vol. 81, pp. 22–29, Jul. 2017. doi: 10.1016/j.automatica.2017.03.011
|
| [29] |
Z. Ning, B. Cai, R. Weng, and L. Zhang, “Nonsynchronized state estimation for fuzzy Markov jump affine systems with switching region partitions,” IEEE Trans. Cybern., vol. 52, no. 4, pp. 2430–2439, Apr. 2022. doi: 10.1109/TCYB.2020.3002938
|
| [30] |
Z. Ning, L. Zhang, G. Feng, and A. Mesbah, “Observation for Markov jump piecewise-affine systems with admissible region-switching paths,” IEEE Trans. Automat. Control, vol. 66, no. 9, pp. 4319–4326, Sept. 2021. doi: 10.1109/TAC.2020.3030845
|
| [31] |
N. Xu, Y. Zhu, X. Chen, and C. Y. Su, “Passivity-based adaptive fault-tolerant control for continuous-time Markov jump PWA systems with actuator faults,” Int. J. Robust Nonlinear Control, vol. 32, no. 4, pp. 2300–2312, Mar. 2022. doi: 10.1002/rnc.5947
|
| [32] |
L. Zhang and E. K. Boukas, “Stability and stabilization of Markovian jump linear systems with partly unknown transition probabilities,” Automatica, vol. 45, no. 2, pp. 463–468, Feb. 2009. doi: 10.1016/j.automatica.2008.08.010
|
| [33] |
H. Yang and S. Yin, “Descriptor observers design for Markov jump systems with simultaneous sensor and actuator faults,” IEEE Trans. Automat. Control, vol. 64, no. 8, pp. 3370–3377, Aug. 2019. doi: 10.1109/TAC.2018.2879765
|
| [34] |
M. Kvasnica, P. Grieder, M. Baotić, and F. J. Christophersen, Multi-Parametric Toolbox (MPT). 2006.
|

Figures(7)






 DownLoad:
DownLoad: