A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 3
Volume 11
Issue 3
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Wan, C. Zhang, F. Wei, C.-K. Zhang, and M. Wu, “Hybrid dynamic variables-dependent event-triggered fuzzy model predictive control,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 3, pp. 723–733, Mar. 2024. doi: 10.1109/JAS.2023.123957

|
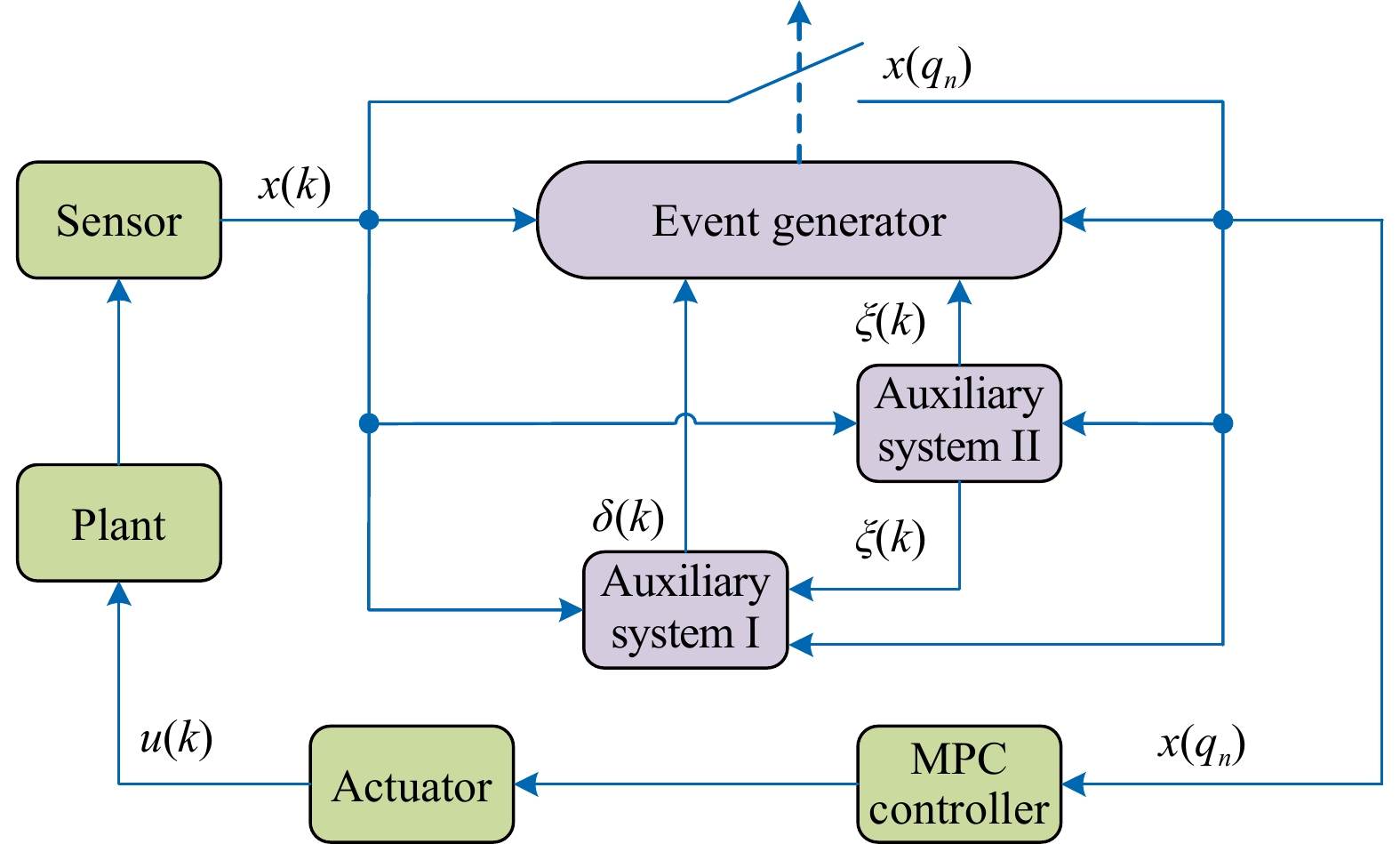
This article focuses on dynamic event-triggered mechanism (DETM)-based model predictive control (MPC) for T-S fuzzy systems. A hybrid dynamic variables-dependent DETM is carefully devised, which includes a multiplicative dynamic variable and an additive dynamic variable. The addressed DETM-based fuzzy MPC issue is described as a “min-max” optimization problem (OP). To facilitate the co-design of the MPC controller and the weighting matrix of the DETM, an auxiliary OP is proposed based on a new Lyapunov function and a new robust positive invariant (RPI) set that contain the membership functions and the hybrid dynamic variables. A dynamic event-triggered fuzzy MPC algorithm is developed accordingly, whose recursive feasibility is analysed by employing the RPI set. With the designed controller, the involved fuzzy system is ensured to be asymptotically stable. Two examples show that the new DETM and DETM-based MPC algorithm have the advantages of reducing resource consumption while yielding the anticipated performance.

| [1] |
Y. Song, Z. Wang, S. Liu, and G. Wei, “N-step MPC for systems with persistent bounded disturbances under SCP,” IEEE Trans. Syst. Man Cybern. Syst., vol. 50, no. 11, pp. 4762–4772, Nov. 2020.
|
| [2] |
J. Wang, Y. Song, and G. Wei, “Robust model predictive control for multirate systems with model uncertainties and circular scheduling,” Int. J. Robust Nonlinear Control, vol. 30, no. 18, pp. 8206–8227, Dec. 2020.
|
| [3] |
Q. Zhang and Y. Zhou, “Recent advances in non-Gaussian stochastic systems control theory and its applications,” Int. J. Netw. Dyn. Intell., vol. 1, no. 1, pp. 111–119, Dec. 2022.
|
| [4] |
H. Wei and Y. Shi, “MPC-based motion planning and control enables smarter and safer autonomous marine vehicles: Perspectives and a tutorial survey,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 8–24, Jan. 2023.
|
| [5] |
X. Ping, J. Hu, T. Lin, B. Ding, P. Wang, and Z. Li, “A survey of output feedback robust MPC for linear parameter varying systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 10, pp. 1717–1751, Oct. 2022.
|
| [6] |
L. Bauersfeld, L. Spannagl, G. J. J. Ducard, and C. H. Onder, “MPC flight control for a tilt-rotor VTOL aircraft,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 4, pp. 2395–2409, Aug. 2021.
|
| [7] |
A. A. Ahmed, B. K. Koh, and Y. I. Lee, “A comparison of finite control set and continuous control set model predictive control schemes for speed control of induction motors,” IEEE Trans. Ind. Inform., vol. 14, no. 4, pp. 1334–1346, Apr. 2018.
|
| [8] |
L. Dai, M. Cannon, F. Yang, and S. Yan, “Fast self-triggered MPC for constrained linear systems with additive disturbances,” IEEE Trans. Autom. Control, vol. 66, no. 8, pp. 3624–3637, Aug. 2021.
|
| [9] |
Y. Jia, Z. Y. Dong, C. Sun, and K. Meng, “Cooperation-based distributed economic MPC for economic load dispatch and load frequency control of interconnected power systems,” IEEE Trans. Power Syst., vol. 34, no. 5, pp. 3964–3966, Sept. 2019.
|
| [10] |
D. Tavernini, M. Metzler, P. Gruber, and A. Sorniotti, “Explicit nonlinear model predictive control for electric vehicle traction control,” IEEE Trans. Control Syst. Technol., vol. 27, no. 4, pp. 1438–1451, Jul. 2019.
|
| [11] |
Z. Hu, P. Shi, and L. Wu, “Polytopic event-triggered robust model predictive control for constrained linear systems,” IEEE Trans. Circuits Syst. I Regular Papers, vol. 68, no. 6, pp. 2594–2603, Jun. 2021.
|
| [12] |
H. Shi, P. Li, J. Cao, C. Su, and J. Yu, “Robust fuzzy predictive control for discrete-time systems with interval time-varying delays and unknown disturbances,” IEEE Trans. Fuzzy Syst., vol. 28, no. 7, pp. 1504–1516, Jul. 2020.
|
| [13] |
Y. Dong, Y. Song, and G. Wei, “Efficient model-predictive control for networked interval type-2 T-S fuzzy system with stochastic communication protocol,” IEEE Trans. Fuzzy Syst., vol. 29, no. 2, pp. 286–297, Feb. 2021.
|
| [14] |
J. Hu and B. Ding, “Output feedback model predictive control with steady-state target calculation for fuzzy systems,” IEEE Trans. Fuzzy Syst., vol. 28, no. 12, pp. 3442–3449, Dec. 2020.
|
| [15] |
C. Peng, M. Wu, X. Xie, and Y. -L. Wang, “Event-triggered predictive control for networked nonlinear systems with imperfect premise matching,” IEEE Trans. Fuzzy Syst., vol. 26, no. 5, pp. 2797–2806, Oct. 2018.
|
| [16] |
X. Ping and W. Pedrycz, “Output feedback model predictive control of interval type-2 T-S fuzzy system with bounded disturbance,” IEEE Trans. Fuzzy Syst., vol. 28, no. 1, pp. 148–162, Jan. 2020.
|
| [17] |
X. Tang, L. Deng, N. Liu, S. Yang, and J. Yu, “Observer-based output feedback MPC for T-S fuzzy system with data loss and bounded disturbance,” IEEE Trans. Cybern., vol. 49, no. 6, pp. 2119–2132, Jun. 2019.
|
| [18] |
X. Wang, S. Li, S. Su, and T. Tang, “Robust fuzzy predictive control for automatic train regulation in high-frequency metro lines,” IEEE Trans. Fuzzy Syst., vol. 27, no. 6, pp. 1295–1308, Jun. 2019.
|
| [19] |
F. Yao, Y. Ding, S. Hong, and S.-H. Yang, “A survey on evolved LoRa-based communication technologies for emerging internet of things applications,” Int. J. Netw. Dyn. Intell., vol. 1, no. 1, pp. 4–19, Dec. 2022.
|
| [20] |
H. Geng, Z. Wang, A. Mousavi, F. E. Alsaadi, and Y. Cheng, “Outlier-resistant filtering with dead-zone-like censoring under try-once-discard protocol,” IEEE Trans. Signal Process., vol. 70, pp. 714–728, Jan. 2022. doi: 10.1109/TSP.2022.3144945
|
| [21] |
L. Ma, Z. Wang, Y. Chen, and X. Yi, “Probability-guaranteed distributed filtering for nonlinear systems with innovation constraints over sensor networks,” IEEE Trans. Control Netw. Syst., vol. 8, no. 2, pp. 951–963, Jun. 2021.
|
| [22] |
X. Wan, T. Han, J. An, and M. Wu, “Hidden Markov model based fault detection for networked singularly perturbed systems,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 10, pp. 6445–6456, Oct. 2021.
|
| [23] |
X. Wang, Y. Sun, and D. Ding, “Adaptive dynamic programming for networked control systems under communication constraints: A survey of trends and techniques,” Int. J. Netw. Dyn. Intell., vol. 1, no. 1, pp. 85–98, Dec. 2022.
|
| [24] |
J. Zhang, J. Song, J. Li, F. Han, and H. Zhang, “Observer-based non-fragile H∞-consensus control for multi-agent systems under deception attacks,” Int. J. Syst. Sci., vol. 52, no. 6, pp. 1223–1236, Feb. 2021.
|
| [25] |
Y. Zhao, X. He, L. Ma, and H. Liu, “Unbiasedness-constrained least squares state estimation for time-varying systems with missing measurements under round-robin protocol,” Int. J. Syst. Sci., vol. 53, no. 9, pp. 1925–1941, Jul. 2022.
|
| [26] |
L. Zou, Z. Wang, B. Shen, H. Dong, and G. Lu, “Encrypted finite-horizon energy-to-peak state estimation for time-varying systems under eavesdropping attacks: Tackling secrecy capacity,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 4, pp. 985–996, Apr. 2023.
|
| [27] |
X.-C. Shangguan, Y. He, C.-K. Zhang, L. Jiang, and M. Wu, “Adjustable event-triggered load frequency control of power systems using control-performance-standard-based fuzzy logic,” IEEE Trans. Fuzzy Syst., vol. 30, no. 8, pp. 3297–3311, Aug. 2022.
|
| [28] |
X.-C. Shangguan, Y. He, C.-K. Zhang, L. Jin, W. Yao, L. Jiang, and M. Wu, “Control performance standards-oriented event-triggered load frequency control for power systems under limited communication bandwidth,” IEEE Trans. Control Syst. Technol., vol. 30, no. 2, pp. 860–868, Mar. 2022.
|
| [29] |
S. Shi, Z. Fei, H. R. Karimi, and H.-K. Lam, “Event-triggered control for switched T-S fuzzy systems with general asynchronism,” IEEE Trans. Fuzzy Syst., vol. 30, no. 1, pp. 27–38, Jan. 2022.
|
| [30] |
X. Tang, M. Wu, M. Li, and B. Ding, “On designing the event-triggered multistep model predictive control for nonlinear system over networks with packet dropouts and cyber attacks,” IEEE Trans. Cybern., vol. 52, no. 10, pp. 11200–11212, Oct. 2022.
|
| [31] |
X. Wan, C. Yang, C.-K. Zhang, and M. Wu, “Hybrid adjusting variables-dependent event-based finite-time state estimation for two-time-scale Markov jump complex networks,” IEEE Trans. Neural Netw. Learn. Syst., 2022. DOI: 10.1109/TNNLS.2022.3183447
|
| [32] |
J. Yang, L. Ma, Y. Chen, and X. Yi, “L2−H∞ state estimation for continuous stochastic delayed neural networks via memory event-triggering strategy,” Int. J. Syst. Sci., vol. 53, no. 13, pp. 2742–2757, Apr. 2022.
|
| [33] |
R. Yang and W. X. Zheng, “Output-based event-triggered predictive control for networked control systems,” IEEE Trans. Ind. Electron., vol. 67, no. 12, pp. 10631–10640, Dec. 2020.
|
| [34] |
Q. Lu, P. Shi, J. Liu, and L. Wu, “Model predictive control under event-triggered communication scheme for nonlinear networked systems,” J. Franklin Inst., vol. 356, no. 5, pp. 2625–2644, Mar. 2019.
|
| [35] |
A. Ma, K. Liu, Q. Zhang, T. Liu, and Y. Xia, “Event-triggered distributed MPC with variable prediction horizon,” IEEE Trans. Autom. Control, vol. 66, no. 10, pp. 4873–4880, Oct. 2021.
|
| [36] |
X. Mi and S. Li, “Event-triggered MPC design for distributed systems with network communications,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 240–250, Jan. 2018.
|
| [37] |
Z. Hu, R. Su, K. Zhang, Z. Xu, and R. Ma, “Resilient event-triggered model predictive control for adaptive cruise control under sensor attacks,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 807–809, Mar. 2023.
|
| [38] |
H. Yang, H. Zhao, Y. Xia, and J. Zhang, “Event-triggered active MPC for nonlinear multiagent systems with packet losses,” IEEE Trans. Cybern., vol. 51, no. 6, pp. 3093–3102, Jun. 2021.
|
| [39] |
I. Ahmad, X. Ge, and Q.-L. Han, “Decentralized dynamic event-triggered communication and active suspension control of in-wheel motor driven electric vehicles with dynamic damping,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 971–986, May 2021. doi: 10.1109/JAS.2021.1003967
|
| [40] |
Y. Ju, D. Ding, X. He, Q.-L. Han, and G. Wei, “Consensus control of multi-agent systems using fault-estimation-in-the-loop: Dynamic event-triggered case,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1440–1451, Aug. 2022.
|
| [41] |
X. Wan, T. Han, J. An, and M. Wu, “Fault diagnosis for networked switched systems: An improved dynamic event-based scheme,” IEEE Trans. Cybern., vol. 52, no. 8, pp. 8376–8387, Aug. 2022.
|
| [42] |
T. Shi, P. Shi, and Z.-G. Wu, “Dynamic event-triggered asynchronous MPC of Markovian jump systems with disturbances,” IEEE Trans. Cybern., vol. 52, no. 11, pp. 11639–11648, Nov. 2022.
|
| [43] |
J. Sun, J. Yang, S. Li, and W. X. Zheng, “Estimate-based dynamic event-triggered output feedback control of networked nonlinear uncertain systems,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 5, pp. 3148–3158, May 2021. doi: 10.1109/TSMC.2019.2918547
|
| [44] |
P. Zhang, Y. Yuan, and L. Guo, “Fault-tolerant optimal control for discrete-time nonlinear system subjected to input saturation: A dynamic event-triggered approach,” IEEE Trans. Cybern., vol. 51, no. 6, pp. 2956–2968, Jun. 2021.
|
| [45] |
S. Wang, Z. Wang, H. Dong, and Y. Chen, “A dynamic event-triggered approach to recursive nonfragile filtering for complex networks with sensor saturations and switching topologies,” IEEE Trans. Cybern., vol. 52, no. 10, pp. 11041–11054, Oct. 2022.
|
| [46] |
Q. Zhang, H. Yan, M. Wang, Z. Li, and Y. Chang, “Asynchronous fault detection filter design for T-S fuzzy singular systems via dynamic event-triggered scheme,” IEEE Trans. Fuzzy Syst., vol. 31, no. 3, pp. 970–981, Mar. 2023.
|
| [47] |
Q. Li, Z. Wang, N. Li, and W. Sheng, “A dynamic event-triggered approach to recursive filtering for complex networks with switching topologies subject to random sensor failures,” IEEE Trans. Neural Netw. Learn. Syst., vol. 31, no. 10, pp. 4381–4388, Oct. 2020.
|
| [48] |
L. Ma, Z. Wang, C. Cai, and F. E. Alsaadi, “A dynamic event-triggered approach to H∞ control for discrete-time singularly perturbed systems with time-delays and sensor saturations,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 11, pp. 6614–6625, Nov. 2021.
|
| [49] |
D. V. Ouellette, “Schur complements and statistics,” Linear Algebra Appl., vol. 36, pp. 187–295, 1981. doi: 10.1016/0024-3795(81)90232-9
|
| [50] |
X. Xie, D. Yue, J. H. Park, and J. Liu, “Enhanced stabilization of discrete-time Takagi-Sugeno fuzzy systems based on a comprehensive real-time scheduling model,” IEEE Trans. Syst. Man Cybern. Syst., vol. 52, no. 2, pp. 881–892, Feb. 2022.
|
| [51] |
H. Zhang, J. Yang, and C.-Y. Su, “T-S fuzzy-model-based robust H∞ design for networked control systems with uncertainties,” IEEE Trans. Ind. Inform., vol. 3, no. 4, pp. 289–301, Nov. 2007.
|
| [52] |
Y.-A. Wang, B. Shen, L. Zou, and Q.-L. Han, “A survey on recent advances in distributed filtering over sensor networks subject to communication constraints,” Int. J. Netw. Dyn. Intell., vol. 2, no. 2, p. 100007, Jun. 2023.
|
Figures(13) / Tables(2)






 DownLoad:
DownLoad: