A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 3
Volume 11
Issue 3
IEEE/CAA Journal of Automatica Sinica
| Citation: | D. He, H. P. Wang, Y. Tian, and Y. Guo, “A fractional-order ultra-local model-based adaptive neural network sliding mode control of n-DOF upper-limb exoskeleton with input deadzone,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 3, pp. 760–781, Mar. 2024. doi: 10.1109/JAS.2023.123882

|
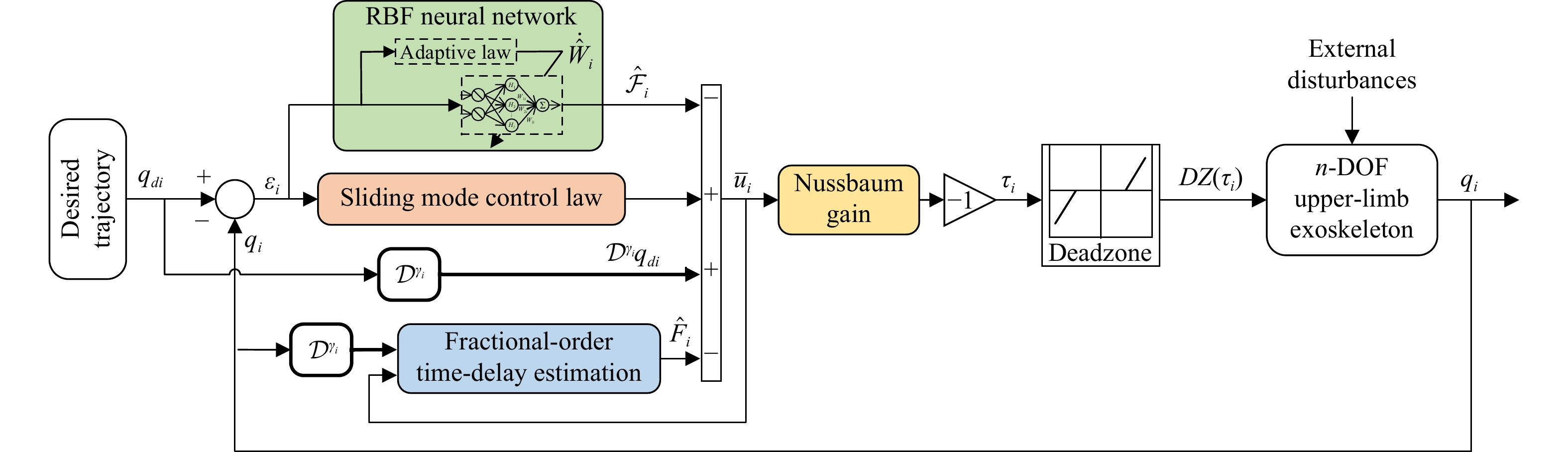
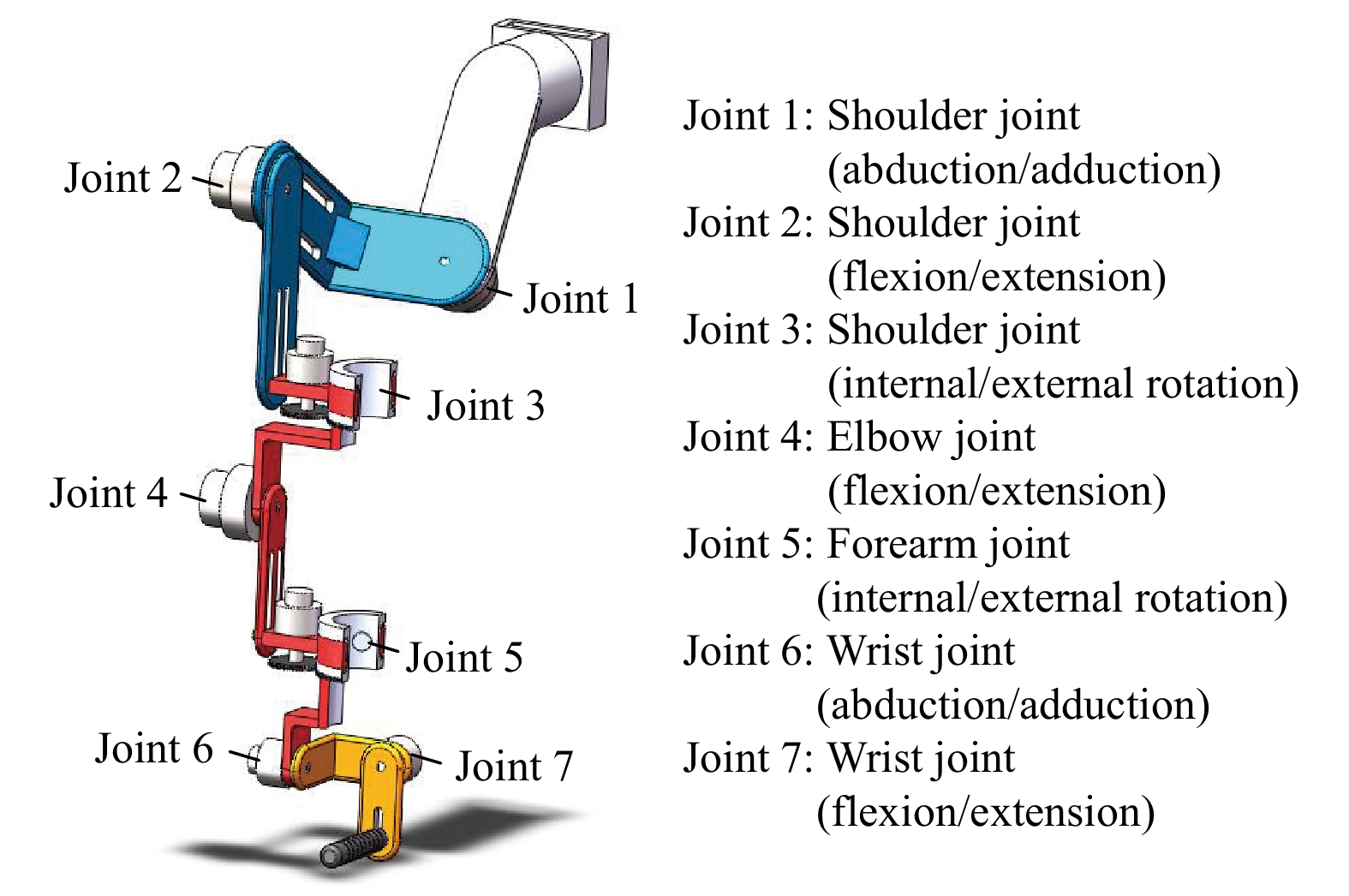
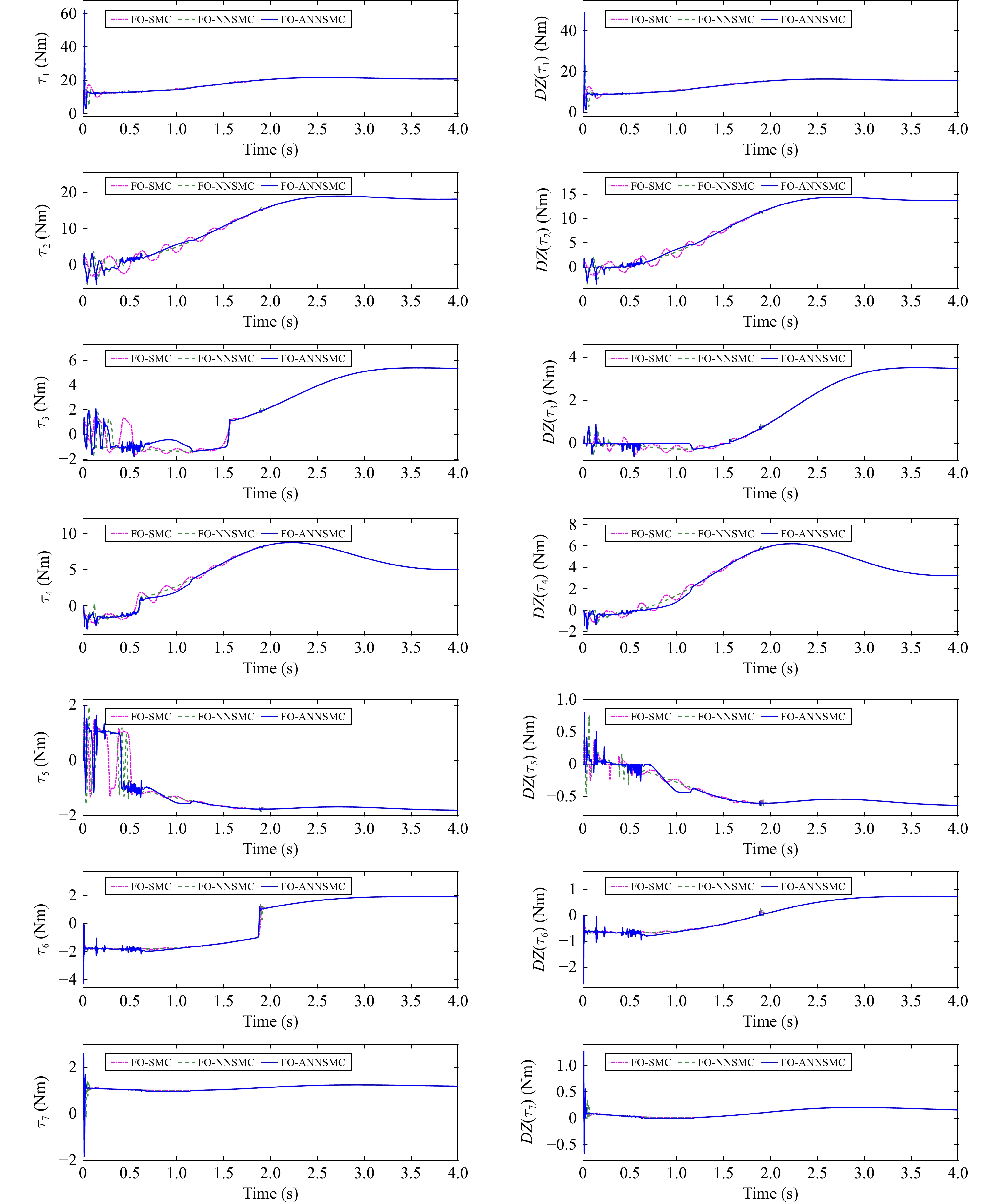
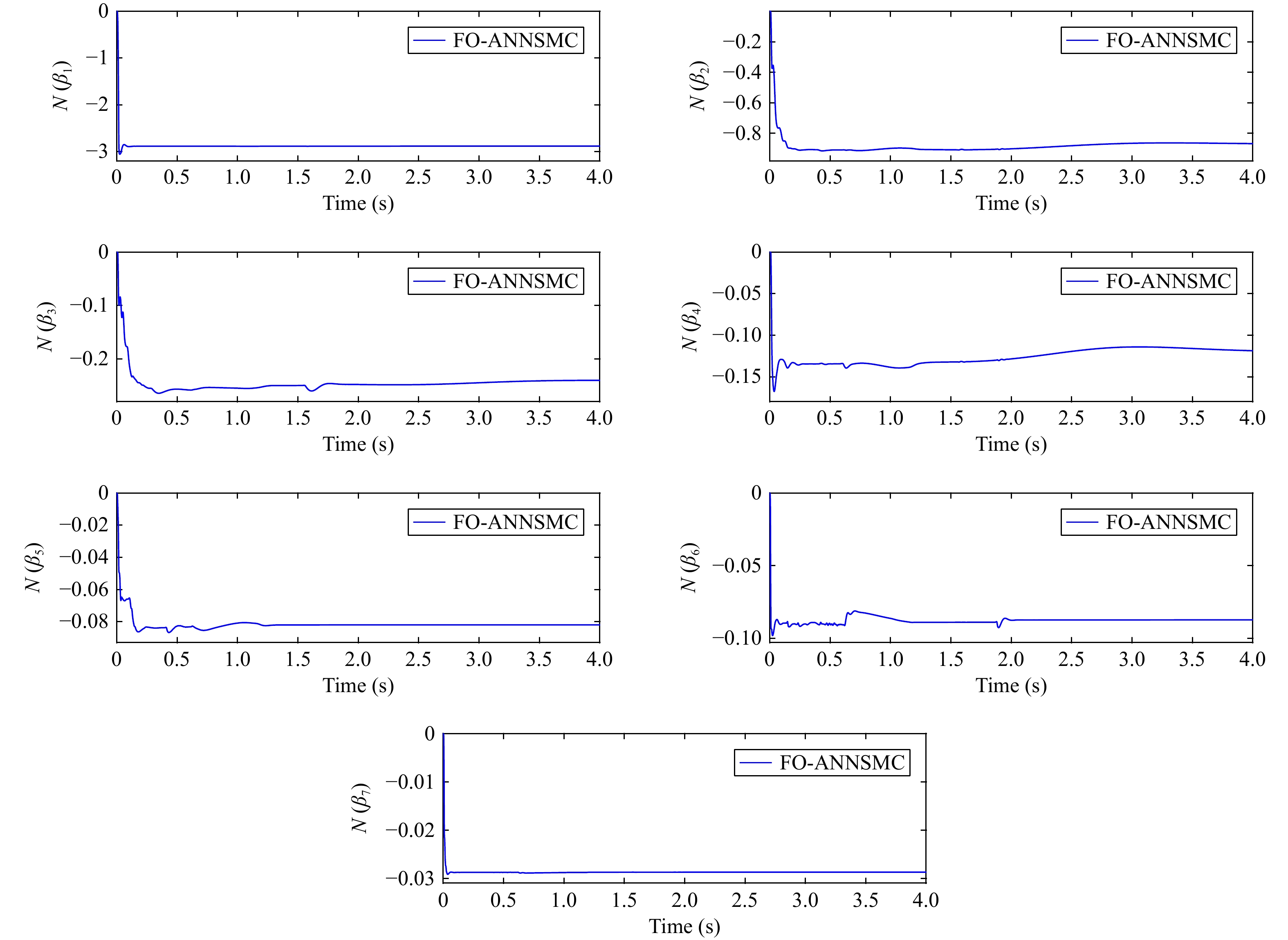
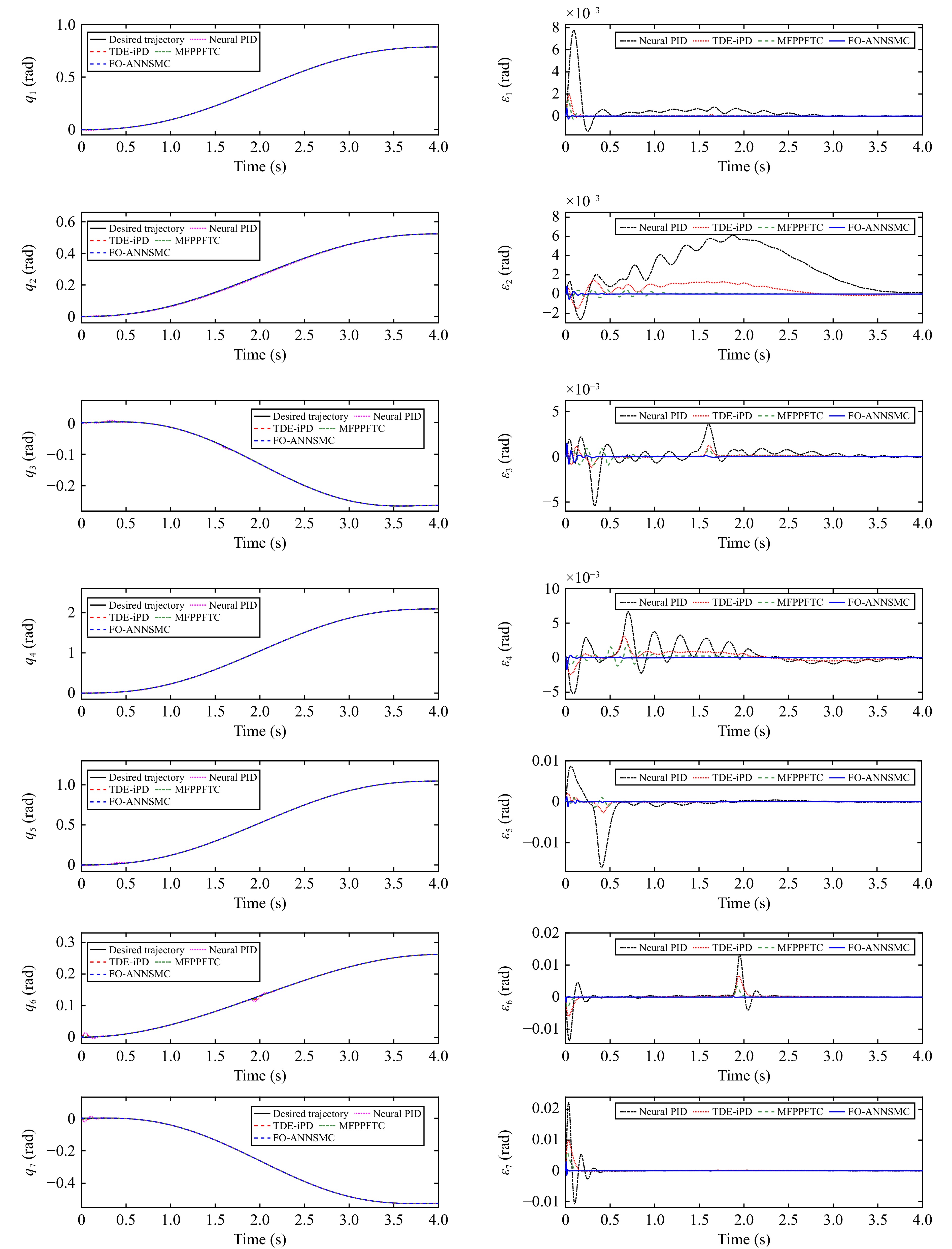
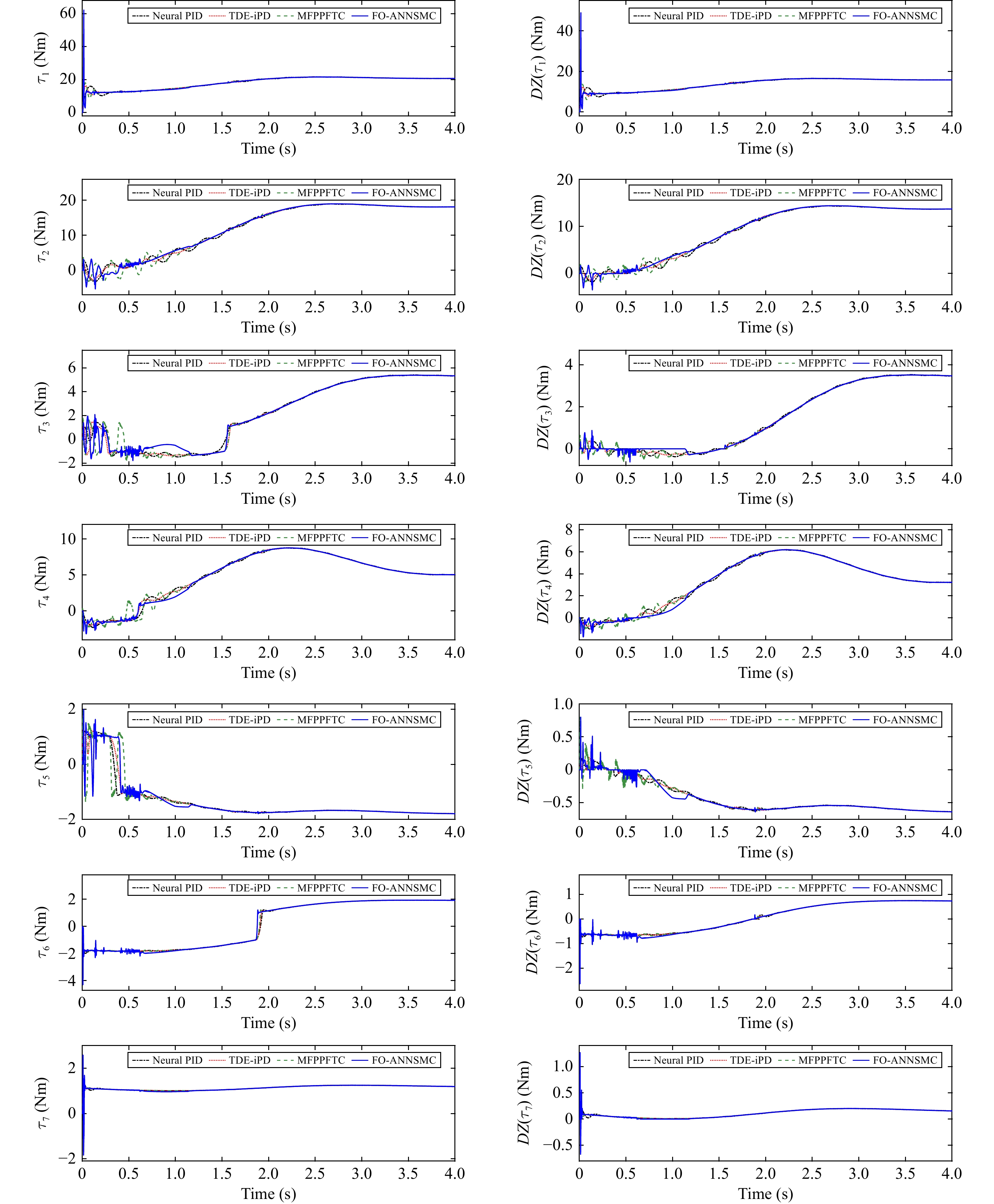
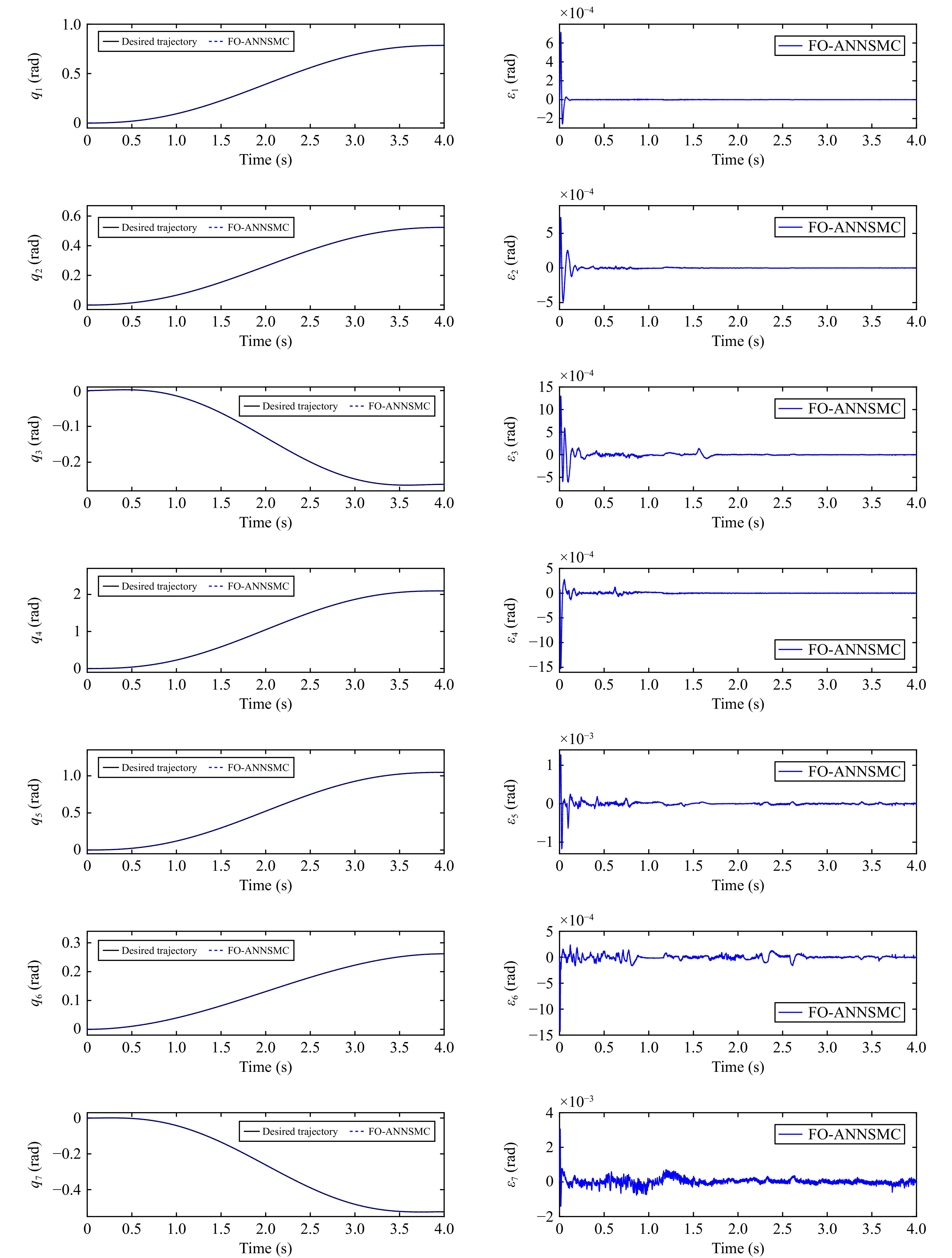
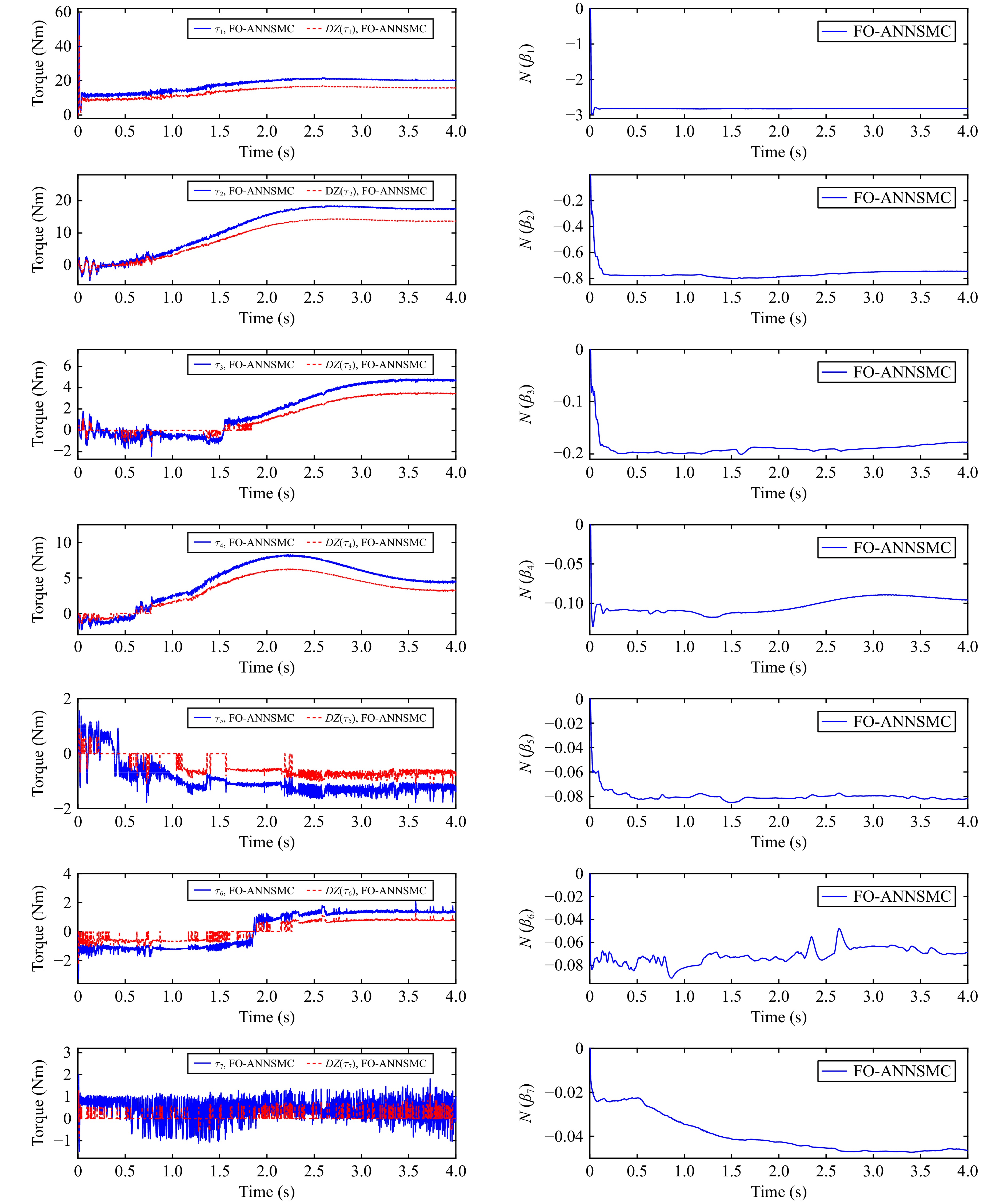
This paper proposes an adaptive neural network sliding mode control based on fractional-order ultra-local model for n-DOF upper-limb exoskeleton in presence of uncertainties, external disturbances and input deadzone. Considering the model complexity and input deadzone, a fractional-order ultra-local model is proposed to formulate the original dynamic system for simple controller design. Firstly, the control gain of ultra-local model is considered as a constant. The fractional-order sliding mode technique is designed to stabilize the closed-loop system, while fractional-order time-delay estimation is combined with neural network to estimate the lumped disturbance. Correspondingly, a fractional-order ultra-local model-based neural network sliding mode controller (FO-NNSMC) is proposed. Secondly, to avoid disadvantageous effect of improper gain selection on the control performance, the control gain of ultra-local model is considered as an unknown parameter. Then, the Nussbaum technique is introduced into the FO-NNSMC to deal with the stability problem with unknown gain. Correspondingly, a fractional-order ultra-local model-based adaptive neural network sliding mode controller (FO-ANNSMC) is proposed. Moreover, the stability analysis of the closed-loop system with the proposed method is presented by using the Lyapunov theory. Finally, with the co-simulations on virtual prototype of 7-DOF iReHave upper-limb exoskeleton and experiments on 2-DOF upper-limb exoskeleton, the obtained compared results illustrate the effectiveness and superiority of the proposed method.

| [1] |
A. Zhu, H. Shen, Z. Shen, J. Song, and Y. Tu, “Innovative design for portability of unpowered military load exoskeleton robot,” in Proc. 15th IEEE Int. Conf. Inform. Autom., Wuyishan, China, 2018, pp. 744−749.
|
| [2] |
L. Grazi, E. Trigili, G. Proface, F. Giovacchini, S. Crea, and N. Vitiello, “Design and experimental evaluation of a semi-passive upper-limb exoskeleton for workers with motorized tuning of assistance,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 28, no. 10, pp. 2276–2285, 2020. doi: 10.1109/TNSRE.2020.3014408
|
| [3] |
Y. Ren, Y. Wu, C. Yang, T. Xu, R. Harvey, and L. Zhang, “Developing a wearable ankle rehabilitation robotic device for in-bed acute stroke rehabilitation,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 25, no. 6, pp. 589–596, 2017. doi: 10.1109/TNSRE.2016.2584003
|
| [4] |
D.X. He, H.P. Wang, and Y. Tian, “Fractional-order ultra-local model-based optimal model-free control for 7-DOF iReHave upper-limb exoskeleton,” IEEE Trans. Circuits Syst. Ⅱ Express Briefs, vol. 69, no. 8, pp. 3510–3514, 2022. doi: 10.1109/TCSII.2022.3161659
|
| [5] |
W. He, A. David, Z. Yin, and C. Sun, “Neural network control of a robotic manipulator with input deadzone and output constraint,” IEEE Trans. Syst. Man Cybern. Syst., vol. 46, no. 6, pp. 759–770, 2016. doi: 10.1109/TSMC.2015.2466194
|
| [6] |
Y. Ouyang, L. Dong, L. Xue, and C. Sun, “Adaptive control based on neural networks for an uncertain 2-DOF helicopter system with input deadzone and output constraints,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 3, pp. 807–815, 2019. doi: 10.1109/JAS.2019.1911495
|
| [7] |
S. Han and J. Lee, “Output-tracking-error-constrained robust positioning control for a nonsmooth nonlinear dynamic system,” IEEE Trans. Ind. Electron., vol. 61, no. 12, pp. 6882–6891, 2014. doi: 10.1109/TIE.2014.2316263
|
| [8] |
W. He, B. Huang, Y. Dong, Z. Li, and C. Su, “Adaptive neural network control for robotic manipulators with unknown deadzone,” IEEE Trans. Cybern., vol. 48, no. 9, pp. 2670–2682, 2018. doi: 10.1109/TCYB.2017.2748418
|
| [9] |
J. Campos and F. Lewis, “Deadzone compensation in discrete time using adaptive fuzzy logic,” IEEE Trans. Fuzzy Syst., vol. 7, no. 6, pp. 697–707, 1999. doi: 10.1109/91.811238
|
| [10] |
S. Tong, Y. Li, and S. Sui, “Adaptive fuzzy output feedback control for switched nonstrict-feedback nonlinear systems with input nonlinearities,” IEEE Trans. Fuzzy Syst., vol. 24, no. 6, pp. 1426–1440, 2016. doi: 10.1109/TFUZZ.2016.2516587
|
| [11] |
S. Ibrir and C. Su, “Simultaneous state and dead-zone parameter estimation for a class of bounded-state nonlinear systems,” IEEE Trans. Control Syst. Technol., vol. 19, no. 4, pp. 911–919, 2011. doi: 10.1109/TCST.2010.2054093
|
| [12] |
Y. Yang, J. Huang, X. Su, and K. Wang, “Event-triggered adaptive output feedback control of multivariable systems with nonsmooth actuator nonlinearities,” IEEE Trans. Syst. Man Cybern. Syst., vol. 51, no. 9, pp. 5557–5566, 2021. doi: 10.1109/TSMC.2019.2956056
|
| [13] |
Z. Chen, Z. Li, and C. Chen, “Disturbance observer-based fuzzy control of uncertain mimo mechanical systems with input nonlinearities and its application to robotic exoskeleton,” IEEE Trans. Cybern., vol. 47, no. 4, pp. 984–994, 2017. doi: 10.1109/TCYB.2016.2536149
|
| [14] |
W. He, X. He, and C. Sun, “Vibration control of an industrial moving strip in the presence of input deadzone,” IEEE Trans. Ind. Electron., vol. 64, no. 6, pp. 4680–4689, 2017. doi: 10.1109/TIE.2017.2674592
|
| [15] |
T. Yang, N. Sun, and Y. Fang, “Adaptive fuzzy control for uncertain mechatronic systems with state estimation and input nonlinearities,” IEEE Trans. Ind. Inform., vol. 18, no. 3, pp. 1770–1780, 2022. doi: 10.1109/TII.2021.3089143
|
| [16] |
J. Xu, J. Xu, and T. H. Lee, “Iterative learning control for systems with input deadzone,” IEEE Trans. Autom. Control, vol. 50, no. 9, pp. 1455–1459, 2005. doi: 10.1109/TAC.2005.854658
|
| [17] |
S. Han and J. Lee, “Approximation-free tracking error constraint control for lagrangian systems,” IEEE Trans. Ind. Electron., vol. 64, no. 2, pp. 1269–1278, 2017. doi: 10.1109/TIE.2016.2613990
|
| [18] |
Y. Zhang, Q. Yan, J. Cai, and X. Wu, “Adaptive iterative learning control for tank gun servo systems with input deadzone,” IEEE Access, vol. 8, pp. 63443–63451, 2020. doi: 10.1109/ACCESS.2020.2983454
|
| [19] |
G. Peng, C. Chen, W. He, and C. Yang, “Neural-learning-based force sensorless admittance control for robots with input deadzone,” IEEE Trans. Ind. Electron., vol. 68, no. 6, pp. 5184–5196, 2021. doi: 10.1109/TIE.2020.2991929
|
| [20] |
W. He, Y. Ouyang, and J. Hong, “Vibration control of a flexible robotic manipulator in the presence of input deadzone,” IEEE Trans. Ind. Inform., vol. 13, no. 1, pp. 48–59, 2017. doi: 10.1109/TII.2016.2608739
|
| [21] |
S. Ge, F. Hong, and T. Lee, “Adaptive neural control of nonlinear time-delay systems with unknown virtual control coefficients,” IEEE Trans. Syst. Man Cybern. B Cybern., vol. 34, no. 1, pp. 499–516, 2004. doi: 10.1109/TSMCB.2003.817055
|
| [22] |
S. Zhang, Y. Dong, Y. Ouyang, Z. Yin, and K. Peng, “Adaptive neural control for robotic manipulators with output constraints and uncertainties,” IEEE Trans. Neural Networks and Learning Syst., vol. 29, no. 11, pp. 5554–5564, 2018. doi: 10.1109/TNNLS.2018.2803827
|
| [23] |
M. Alfaro-Ponce, A. Cruz, and I. Chairez, “Adaptive identifier for uncertain complex nonlinear systems based on continuous neural networks,” IEEE Trans. Neural Networks and Learning Syst., vol. 25, no. 3, pp. 483–494, 2014. doi: 10.1109/TNNLS.2013.2275959
|
| [24] |
Z. Li, J. Li, S. Zhao, Y. Yuan, Y. Kang, and C. Chen, “Adaptive neural control of a kinematically redundant exoskeleton robot using brain-machine interfaces,” IEEE Trans. Neural Networks and Learning Syst., vol. 30, no. 12, pp. 3558–3571, 2019. doi: 10.1109/TNNLS.2018.2872595
|
| [25] |
S. Chen, Z. Chen, B, Y ao, X. Zhu, S. Zhu, Q. Wang, and Y. Song, “Adaptive robust cascade force control of 1-DOF hydraulic exoskeleton for human performance augmentation,” IEEE/ASME Trans. Mechatron., vol. 22, no. 2, pp. 589–600, 2017. doi: 10.1109/TMECH.2016.2614987
|
| [26] |
M.H. Rahman, M.J. Rahman, O. Cristobal, M. Saad, J. P. Kenne, and P. S. Archambault, “Development of a whole arm wearable robotic exoskeleton for rehabilitation and to assist upper limb movements,” Robotica, vol. 33, pp. 19–39, 2015. doi: 10.1017/S0263574714000034
|
| [27] |
Q. Wu, B. Chen, and H. Wu, “RBFN-based adaptive backstepping sliding mode control of an upper-limb exoskeleton with dynamic uncertainties,” IEEE Access, vol. 7, pp. 134635–134646, 2019. doi: 10.1109/ACCESS.2019.2941973
|
| [28] |
C. Fallaha, M. Saad, J. Ghommam, and Y. Kali, “Sliding mode control with model-based switching functions applied on a 7-DOF exoskeleton arm,” IEEE/ASME Trans. Mechatron., vol. 26, no. 1, pp. 539–550, 2021.
|
| [29] |
B. Brahmi, M. Saad, C. Ochoa-Luna, M. H. Rahman, and A. Brahmi, “Adaptive tracking control of an exoskeleton robot with uncertain dynamics based on estimated time-delay control,” IEEE/ASME Trans. Mechatron., vol. 23, no. 2, pp. 575–585, 2018. doi: 10.1109/TMECH.2018.2808235
|
| [30] |
Z. Li, C. Su, G. Li, and H. Su, “Fuzzy approximation-based adaptive backstepping control of an exoskeleton for human upper limbs,” IEEE Trans. Fuzzy Syst., vol. 23, no. 3, pp. 555–566, 2015. doi: 10.1109/TFUZZ.2014.2317511
|
| [31] |
Z. Li, C. Su, L. Wang, Z. Chen, and T. Chai, “Nonlinear disturbance observer-based control design for a robotic exoskeleton incorporating fuzzy approximation,” IEEE Trans. Ind. Electron., vol. 62, no. 9, pp. 5763–5775, 2015. doi: 10.1109/TIE.2015.2447498
|
| [32] |
S. Han, H. P. Wang, Y. Tian, and N. Christov, “Time-delay estimation based computed torque control with robust adaptive RBF neural network compensator for a rehabilitation exoskeleton,” ISA Trans., vol. 97, pp. 171–181, 2020. doi: 10.1016/j.isatra.2019.07.030
|
| [33] |
W. Cao, C. Chen, H. Hu, K. Fang, and X. Wu, “Effect of hip assistance modes on metabolic cost of walking with a soft exoskeleton,” IEEE Trans. Autom. Sci. Eng., vol. 18, no. 2, pp. 426–436, 2021. doi: 10.1109/TASE.2020.3027748
|
| [34] |
V. Molazadeh, Q. Zhang, X. Bao, and N. Sharma, “An iterative learning controller for a switched cooperative allocation strategy during sit-to-stand tasks with a hybrid exoskeleton,” IEEE Trans. Control Syst. Technol., vol. 30, no. 3, pp. 1021–1036, 2022. doi: 10.1109/TCST.2021.3089885
|
| [35] |
X. Xiong, C. Do, and P. Manoonpong, “Learning-based multifunctional elbow exoskeleton control,” IEEE Trans. Ind. Electron., vol. 69, no. 9, pp. 9216–9224, 2022. doi: 10.1109/TIE.2021.3116572
|
| [36] |
Z. Zhuang, H. Tao, Y. Chen, V. Stojanovic, and W. Paszke, “Iterative learning control for repetitive tasks with randomly varying trial lengths using successive projection,” Int. J. Adapt. Control Signal Process., vol. 36, no. 5, pp. 1196–1215, 2022. doi: 10.1002/acs.3396
|
| [37] |
O. Narvaez Aroche, P. Meyer, S. Tu, A. Packard, and M. Arcak, “Robust control of the sit-to-stand movement for a powered lower limb orthosis,” IEEE Trans. Control Syst. Technol., vol. 28, no. 6, pp. 2390–2403, 2020. doi: 10.1109/TCST.2019.2945908
|
| [38] |
P. Cheng, H. Wang, V. Stojanovic, S. He, K. Shi, X. Luan, F. Liu, and C. Sun., “Asynchronous fault detection observer for 2-D Markov jump systems,” IEEE Trans. Cybern., vol. 52, no. 12, pp. 13623–13634, 2022. doi: 10.1109/TCYB.2021.3112699
|
| [39] |
V. Djordjevic, V. Stojanovic, H. Tao, X. Song, S. He, and W. Gao, “Data-driven control of hydraulic servo actuator based on adaptive dynamic programming,” Discrete Continuous Dyn. Syst. Ser. S, vol. 15, no. 7, pp. 1633–1650, 2022. doi: 10.3934/dcdss.2021145
|
| [40] |
N. Nedic, V. Stojanovic, and V. Djordjevic, “Optimal control of hydraulically driven parallel robot platform based on firefly algorithm,” Nonlinear Dynamics, vol. 82, pp. 1457–1473, 2015. doi: 10.1007/s11071-015-2252-5
|
| [41] |
H.P. Wang, G. Mustafa, and Y. Tian, “Model-free fractional-order sliding mode control for an active vehicle suspension system,” Adv. Eng. Softw., vol. 115, pp. 452–461, 2018. doi: 10.1016/j.advengsoft.2017.11.001
|
| [42] |
S. Han, H. P. Wang, and Y. Tian, “Model-free based adaptive nonsingular fast terminal sliding mode control with time-delay estimation for a 12 DOF multi-functional lower limb exoskeleton,” Adv. Eng. Softw., vol. 119, pp. 38–47, 2018. doi: 10.1016/j.advengsoft.2018.01.004
|
| [43] |
S. Han, H. P. Wang, and Y. Tian, “A linear discrete-time extended state observer-based intelligent PD controller for a 12 DOFs lower limb exoskeleton LLE-RePA,” Mech. Syst. Signal Process, vol. 138, p. 106547, 2020. doi: 10.1016/j.ymssp.2019.106547
|
| [44] |
H.P. Wang, X. Ye, Y. Tian, and N. Christov, “Model-free-based terminal SMC of quadrotor attitude and position,” IEEE Trans. Aerosp. Electron. Syst., vol. 52, no. 5, pp. 2519–2528, 2016. doi: 10.1109/TAES.2016.150303
|
| [45] |
M. Fliess and C. Join, “Model-free control,” Int. J. Control, vol. 86, no. 12, pp. 2228–2252, 2013. doi: 10.1080/00207179.2013.810345
|
| [46] |
S. Bembli, N. Haddad, and S. Belghith, “Stability study and robustness analysis of an exoskeleton-upper limb system,” in Proc. IEEE 18th Int. Multi-Conf. Syst. Signals Devices, Monastir, Tunisia, 2021, pp. 147–153.
|
| [47] |
H. P. Wang, D. Zheng, and Y. Tian, “High pressure common rail injection system modeling and control,” ISA Trans., vol. 63, pp. 265–273, 2016. doi: 10.1016/j.isatra.2016.03.002
|
| [48] |
J. Sun, J. Wang, P. Yang, and S. Guo, “Model-free prescribed performance fixed-time control for wearable exoskeletons,” Appl. Math. Model., vol. 90, pp. 61–77, 2021. doi: 10.1016/j.apm.2020.09.010
|
| [49] |
H. P. Wang, H. Xu, Y. Tian, and H. Tang, “α-variable adaptive model free control of iReHave upper-limb exoskeleton,” Adv. Eng. Softw., vol. 148, p. 102872, 2020. doi: 10.1016/j.advengsoft.2020.102872
|
| [50] |
D. X. He, H. P. Wang, and Y. Tian, “An α-variable model-free prescribed-time control for nonlinear system with uncertainties and disturbances,” Int. J. Robust Nonlinear Control, vol. 32, no. 9, pp. 5673–5693, 2022. doi: 10.1002/rnc.6105
|
| [51] |
R. Nussbaum, “Some remarks on a conjecture in parameter adaptive control,” Syst. Control Lett., vol. 3, no. 5, pp. 243–246, 1983. doi: 10.1016/0167-6911(83)90021-X
|
| [52] |
C. Liu, X. Liu, H. Wang, S. Lu, and Y. Zhou, “Adaptive control and application for nonlinear systems with input nonlinearities and unknown virtual control coefficients,” IEEE Trans. Cybern., vol. 52, no. 9, pp. 8804–8817, 2022. doi: 10.1109/TCYB.2021.3054373
|
| [53] |
L. Wang and C. Chen, “Adaptive fuzzy dynamic surface control of nonlinear constrained systems with unknown virtual control coefficients,” IEEE Trans. Fuzzy Syst., vol. 28, no. 8, pp. 1737–1747, 2020. doi: 10.1109/TFUZZ.2019.2921277
|
| [54] |
C. Wang, C. Wen, and L. Guo, “Multivariable adaptive control with unknown signs of the high-frequency gain matrix using novel Nussbaum functions,” Automatica, vol. 111, p. 108618, 2020. doi: 10.1016/j.automatica.2019.108618
|
| [55] |
C. Chen, Z. Liu, Y. Zhang, C. L. P. Chen, and S. Xie, “Adaptive control of MIMO mechanical systems with unknown actuator nonlinearities based on the Nussbaum gain approach,” IEEE CAA J. Autom. Sin., vol. 3, no. 1, pp. 26–34, 2016. doi: 10.1109/JAS.2016.7373759
|
| [56] |
R. Wang and J. Liu, “Trajectory tracking control of a 6-DOF quadrotor UAV with input saturation via backstepping,” J. Franklin Inst., vol. 355, no. 7, pp. 3288–3309, 2018. doi: 10.1016/j.jfranklin.2018.01.039
|
| [57] |
U. M. Al-Saggaf, R. Mansouri, M. Bettayeb, I. M. Mehedi, and K. Munawar, “Robustness improvement of the fractional-order LADRC scheme for integer high-order system,” IEEE Trans. Ind. Electron., vol. 68, no. 9, pp. 8572–8581, 2021. doi: 10.1109/TIE.2020.3016258
|
| [58] |
Y. Li, Y. Chen, and I. Podlubny, “Mittag-Leffler stability of fractional order nonlinear dynamic systems,” Automatica, vol. 45, no. 8, pp. 1965–1969, 2009. doi: 10.1016/j.automatica.2009.04.003
|
| [59] |
M. De la Sen, “About robust stability of Caputo linear fractional dynamic systems with time delays through fixed point theory.,” Fixed Point Theory Appl., vol. 2011, p. 867932, 2011. doi: 10.1155/2011/867932
|
| [60] |
M. Hou, G. Duan, and M. Guo, “New versions of Barbalat’s lemma with application,” J. Control Theory Appl., vol. 8, pp. 545–547, 2010. doi: 10.1007/s11768-010-8178-z
|
| [61] |
W. Yu and J. Rosen, “Neural PID control of robot manipulators with application to an upper limb exoskeleton,” IEEE Trans. Cybern., vol. 43, no. 2, pp. 673–684, 2013. doi: 10.1109/TSMCB.2012.2214381
|
| [62] |
S. Haykin, “Neural networks and learning machines,” Pearson Education India, 2009.
|
| [63] |
A. Bartoszewicz and A. Nowacka-Leverton, “ITAE optimal sliding modes for third-order systems with input signal and state constraints,” IEEE Trans. Autom. Control, vol. 55, no. 8, pp. 1928–1932, 2010. doi: 10.1109/TAC.2010.2049688
|
| [64] |
A. Awouda and R. Mamat, “Refine PID tuning rule using ITAE criteria,” in Proc. 2nd Int. Conf. Computer and Automation Engineering, Singapore, 2010, pp. 171–176.
|
| [65] |
C. A. Pérez-Gómez, J. Liceaga-Castro, and I. Siller-Alcalá, “Hard dead zone and friction modeling and identification of a permanent magnet DC motor non-linear model,” WSEAS Trans. Syst. Control, vol. 15, pp. 527–536, 2020. doi: 10.37394/23203.2020.15.51
|
Figures(19) / Tables(5)






 DownLoad:
DownLoad: