A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 12
Issue 5
Volume 12
Issue 5
IEEE/CAA Journal of Automatica Sinica
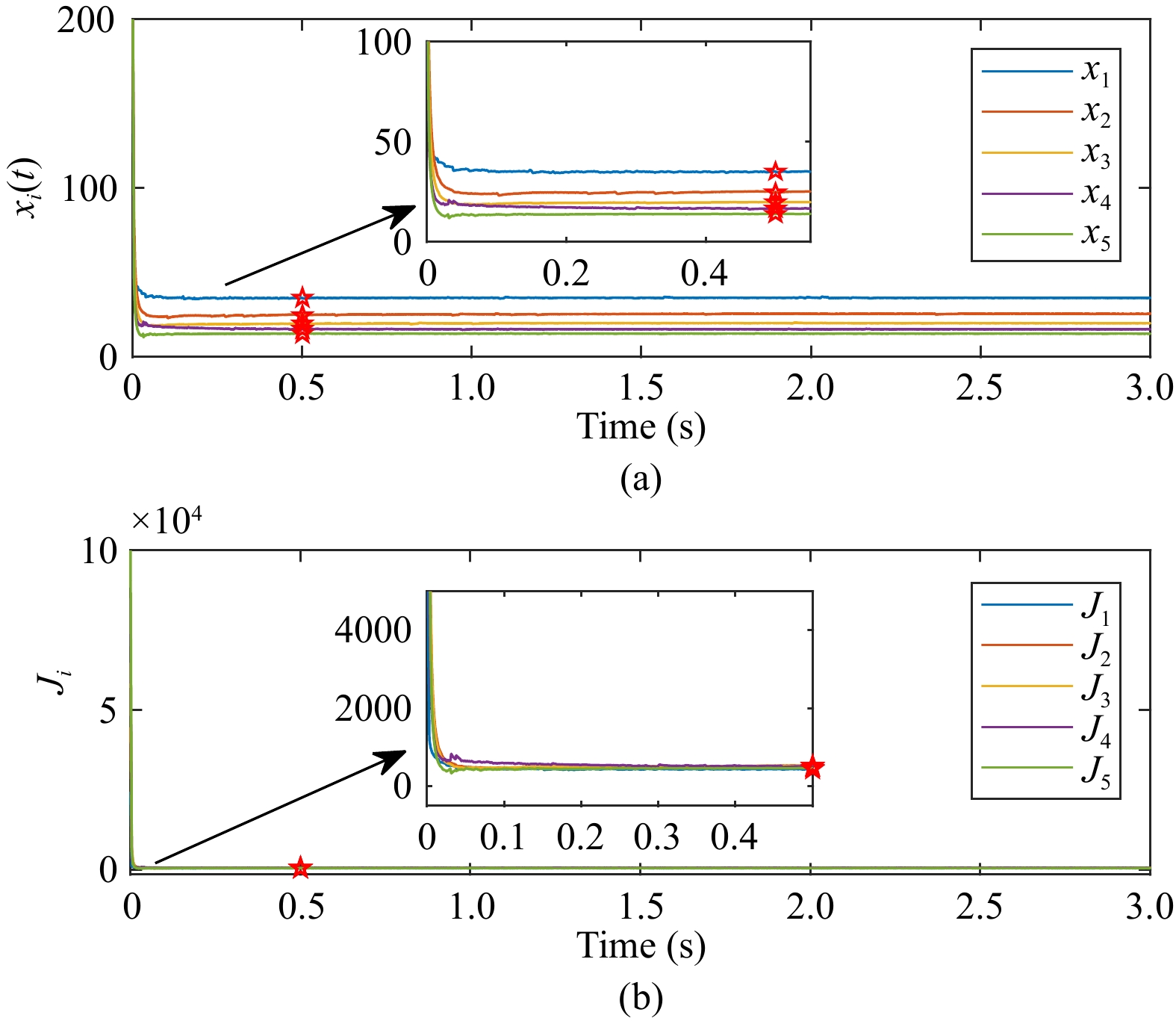
| Citation: | J.-Z. Xu, Z.-W. Liu, M.-F. Ge, Y.-W. Wang, and D. He, “Distributed robust predefined-time algorithm for seeking Nash equilibrium in MASs,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 5, pp. 1053–1055, May 2025. doi: 10.1109/JAS.2023.123879

|

| [1] |
R. Olfati-Saber, “Flocking for multi-agent dynamic systems: Algorithms and theory,” IEEE Trans. Autom. Control, vol. 51, no. 3, pp. 401–420, 2006. doi: 10.1109/TAC.2005.864190
|
| [2] |
M. Firouzbahrami and A. Nobakhti, “Cooperative fixed-time/finite-time distributed robust optimization of multi-agent systems,” Automatica, vol. 142, p. 110358, 2022. doi: 10.1016/j.automatica.2022.110358
|
| [3] |
M. Ye, Q.-L Han, L. Ding, and S. Xu, “Distributed Nash equilibrium seeking in games with partial decision information: A survey,” Proc. IEEE, vol. 111, no. 2, pp. 140–157, 2023. doi: 10.1109/JPROC.2023.3234687
|
| [4] |
X. F. Wang, X. M. Sun, A. R. Teel, and K. Z. Liu, “Distributed robust Nash equilibrium seeking for aggregative games under persistent attacks: A hybrid systems approach,” Automatica, vol. 122, p. 109255, 2020. doi: 10.1016/j.automatica.2020.109255
|
| [5] |
M. Ye, D. Li, Q.-L. Han, and L. Ding, “Distributed Nash equilibrium seeking for general networked games with bounded disturbances,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 376–387, 2022.
|
| [6] |
X. Fang, J. Lü, and G. Wen, “Distributed finite-time Nash equilibrium seeking for non-cooperative games,” CSIAM Trans. Appl. Math., vol. 2, no. 1, pp. 162–174, 2021. doi: 10.4208/csiam-am.2020-0028
|
| [7] |
Z. Li and Z. Ding. “Distributed Nash equilibrium searching via fixed-time consensus-based algorithms,” in Proc. American Control Conf. 2019, pp. 2765−2770.
|
| [8] |
J. I. Poveda, M. Krstic, and T. Basar, “Fixed-time Nash equilibrium seeking in time-varying networks,” IEEE Trans. Autom. Control, vol. 68, no. 4, pp. 1954–1969, 2022. doi: 10.1109/TAC.2022.3168527
|
| [9] |
M. Ye, “Distributed robust seeking of Nash equilibrium for networked games: An extended state observer-based approach,” IEEE Trans. Cybern., vol. 52, no. 3, pp. 1527–1538, 2020.
|
| [10] |
A. J. Munoz-Vazquez, J. D. Sánchez-Torres, E. Jimenez-Rodriguez, and A. G. Loukianov, “Predefined-time robust stabilization of robotic manipulators,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 3, pp. 1033–1040, 2019. doi: 10.1109/TMECH.2019.2906289
|
Figures(2)






 DownLoad:
DownLoad: