A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 4
Volume 11
Issue 4
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Wang, Q. Wang, Y. Su, Y. Ouyang, and C. Sun, “Adaptive sensor-fault tolerant control of unmanned underwater vehicles with input saturation,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 4, pp. 907–918, Apr. 2024. doi: 10.1109/JAS.2023.123837

|
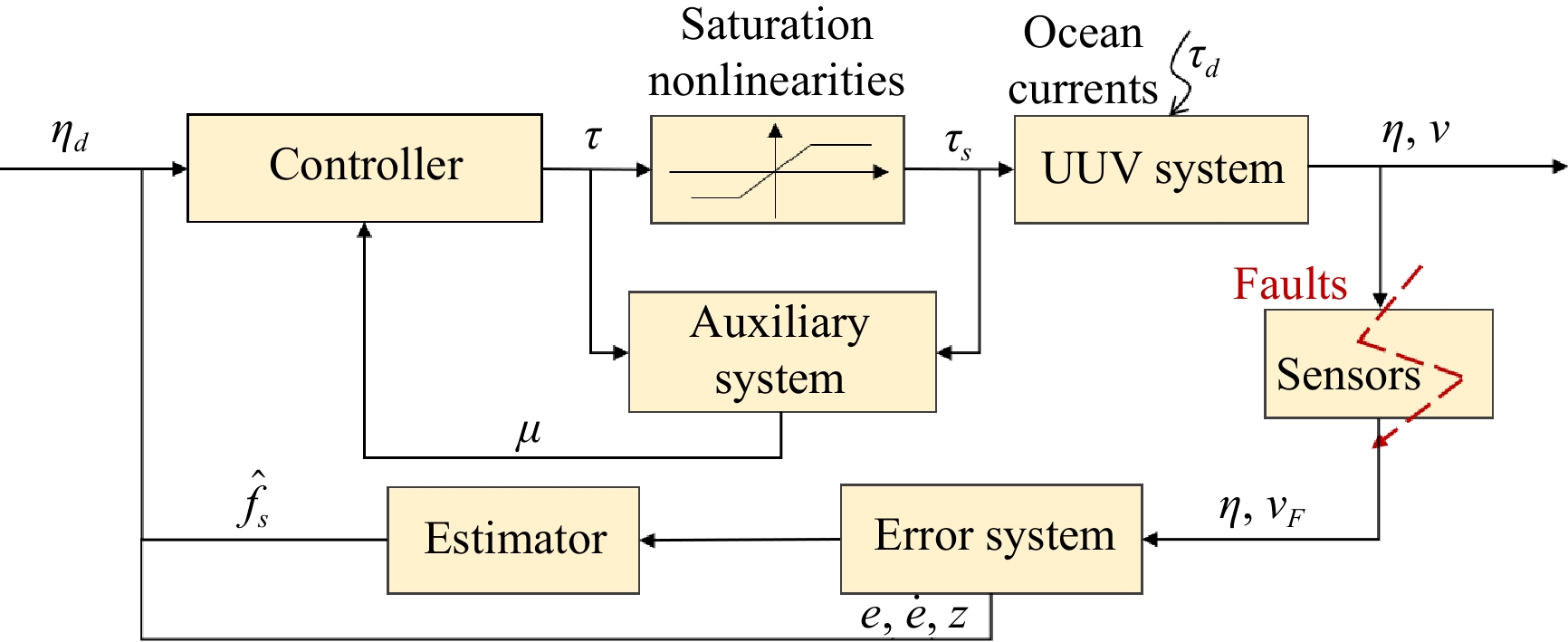
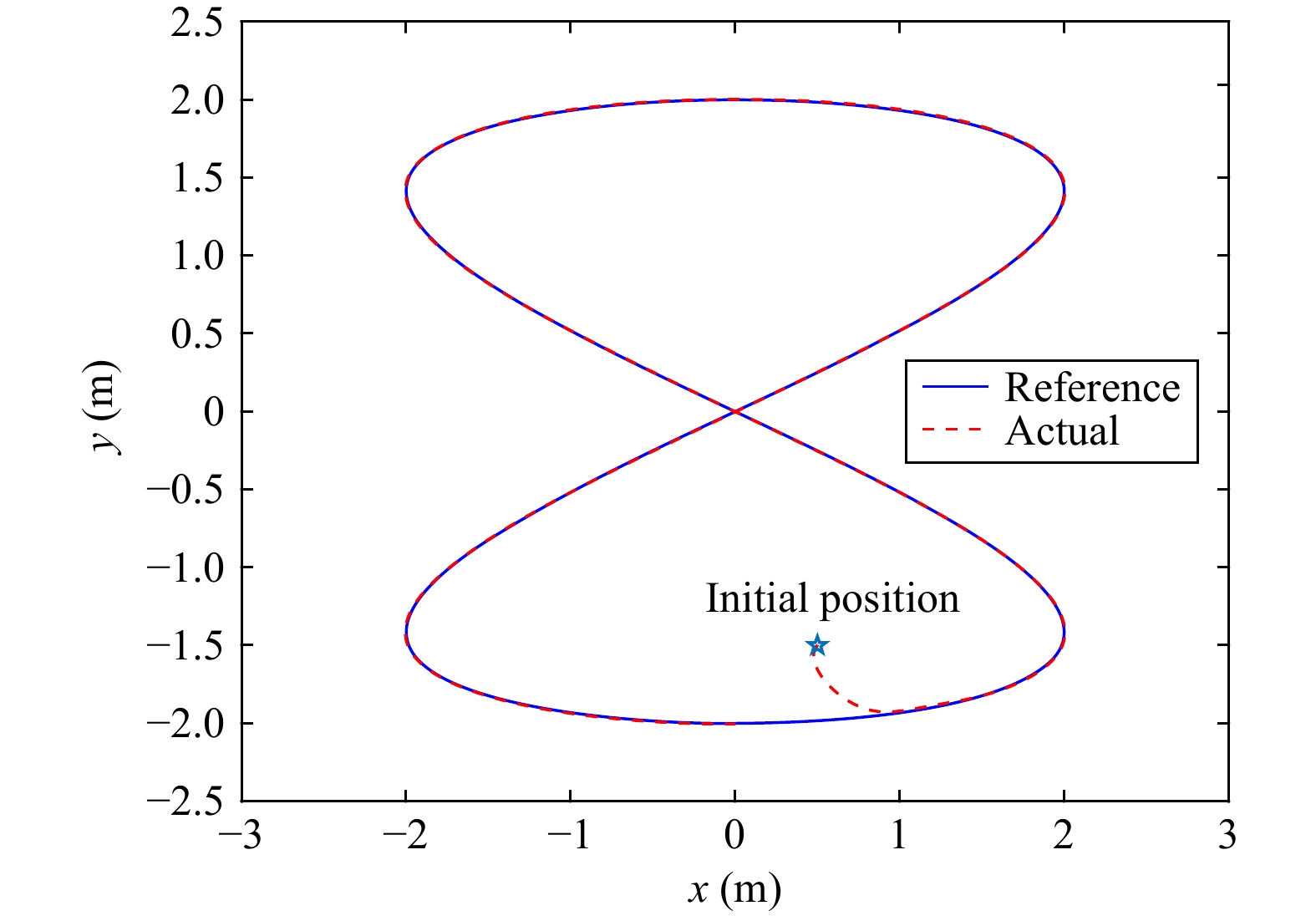
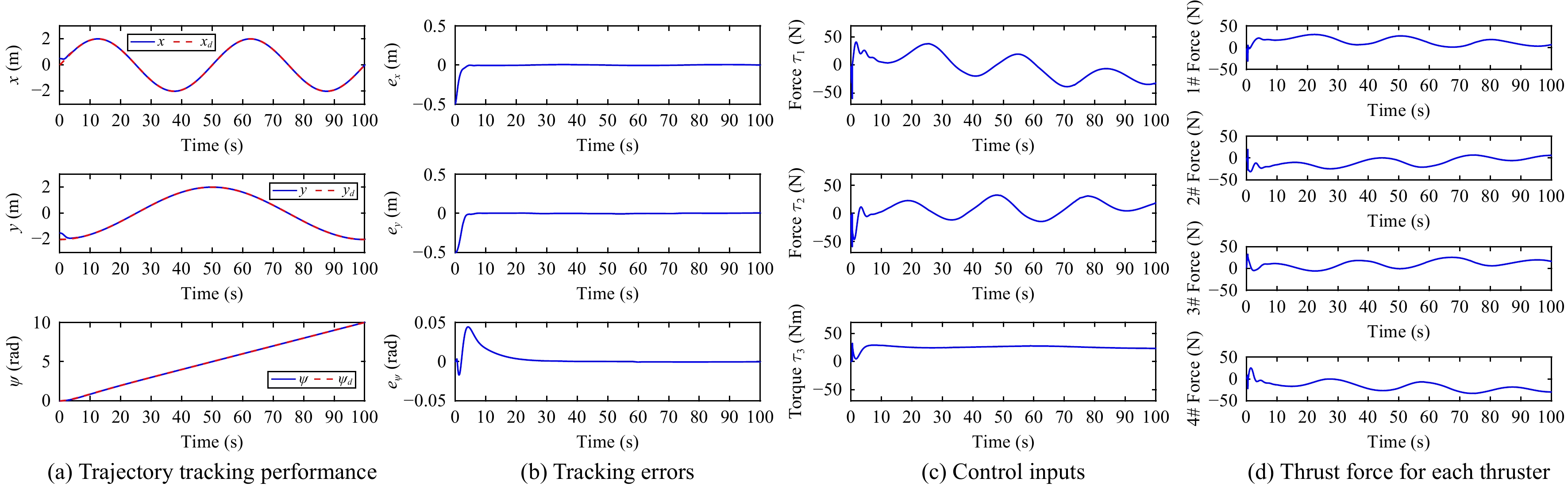
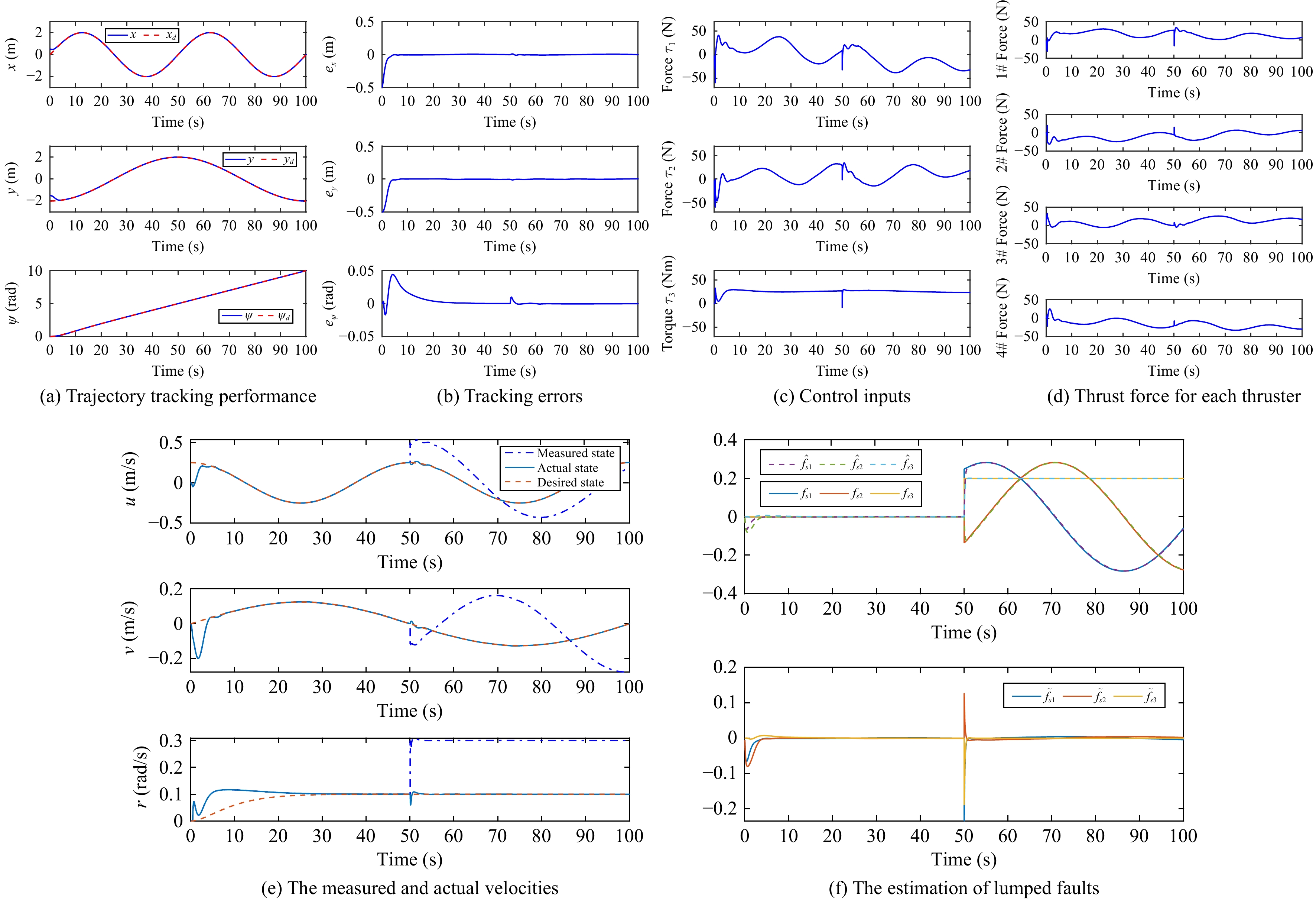
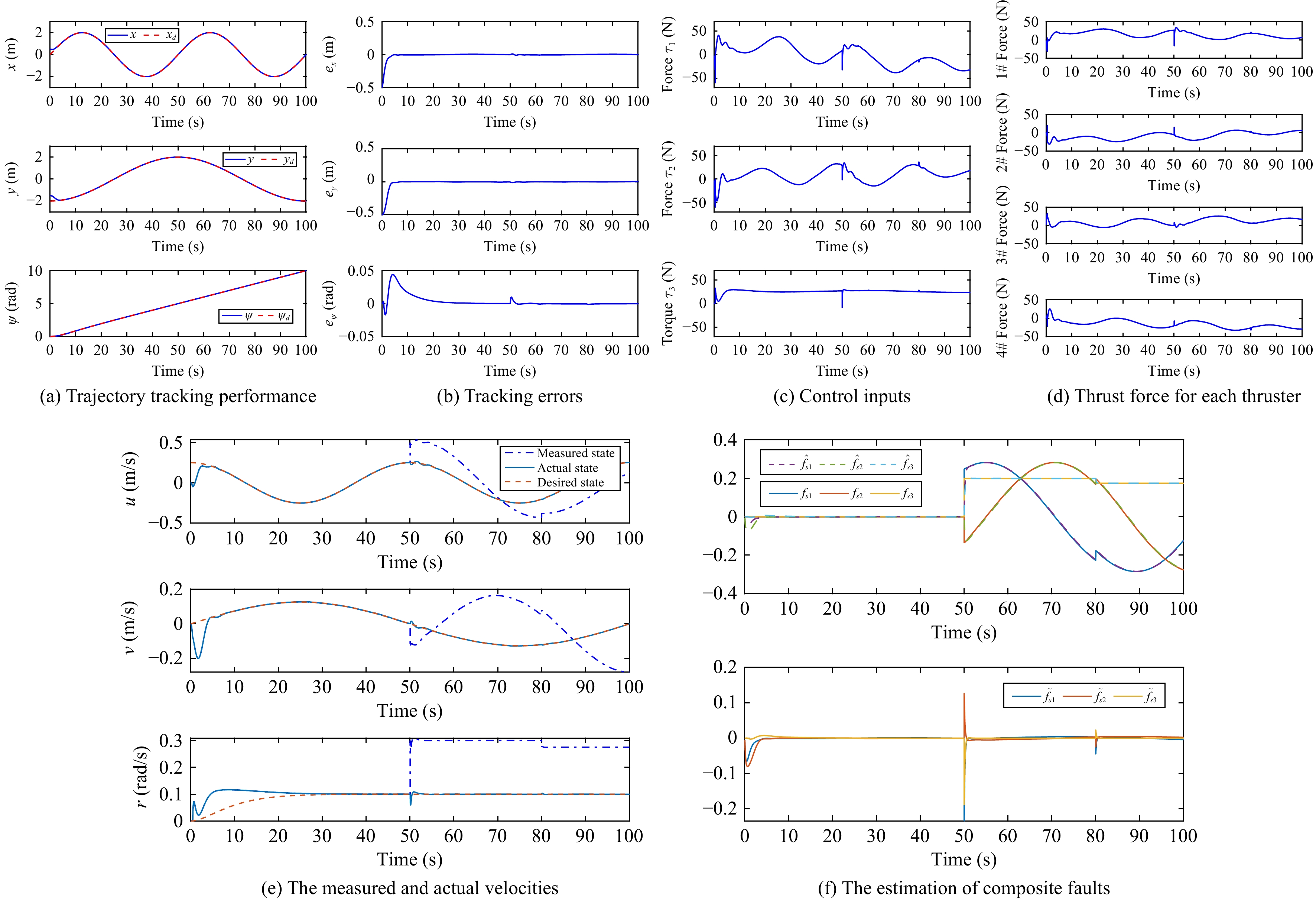
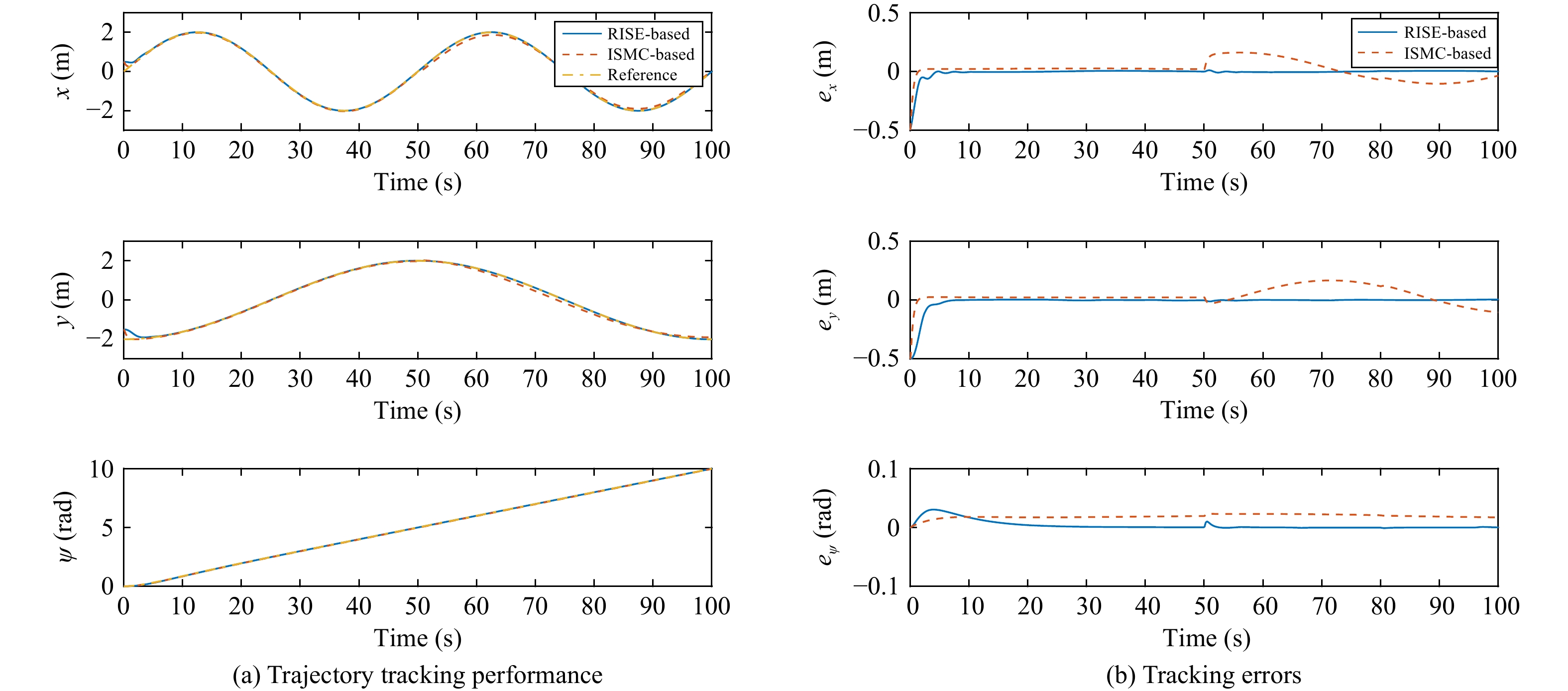
This paper investigates the tracking control problem for unmanned underwater vehicles (UUVs) systems with sensor faults, input saturation, and external disturbance caused by waves and ocean currents. An active sensor fault-tolerant control scheme is proposed. First, the developed method only requires the inertia matrix of the UUV, without other dynamic information, and can handle both additive and multiplicative sensor faults. Subsequently, an adaptive fault-tolerant controller is designed to achieve asymptotic tracking control of the UUV by employing robust integral of the sign of error feedback method. It is shown that the effect of sensor faults is online estimated and compensated by an adaptive estimator. With the proposed controller, the tracking error and estimation error can asymptotically converge to zero. Finally, simulation results are performed to demonstrate the effectiveness of the proposed method.

| [1] |
H. Liu, Y. Wang, and F. L. Lewis, “Robust distributed formation controller design for a group of unmanned underwater vehicles,” IEEE Trans. Systems,Man,and Cyber.: Systems, vol. 51, no. 2, pp. 1215–1223, 2021. doi: 10.1109/TSMC.2019.2895499
|
| [2] |
Z. Peng, D. Wang, T. Li, and M. Han, “Output-feedback cooperative formation maneuvering of autonomous surface vehicles with connectivity preservation and collision avoidance,” IEEE Trans. Cyber., vol. 50, no. 6, pp. 2527–2535, 2020. doi: 10.1109/TCYB.2019.2914717
|
| [3] |
Y. Ouyang, J. Liu, and C. Sun, “Time-synchronized control for an uncertain marine vessel system with external disturbance,” IEEE Trans. Circuits and Systems Ⅱ: Express Briefs, vol. 70, no. 8, pp. 2929–2933, 2023. doi: 10.1109/TCSII.2023.3246058
|
| [4] |
S. Mahmoudzadeh, D. M. W. Powers, and A. Atyabi, “UUV’s hierarchical DE-based motion planning in a semi dynamic underwater wireless sensor network,” IEEE Trans. Cyber., vol. 49, no. 8, pp. 2992–3005, 2019. doi: 10.1109/TCYB.2018.2837134
|
| [5] |
C. Lin, H. Wang, M. Fu, J. Yuan, and J. Gu, “A gated recurrent unit-based particle filter for unmanned underwater vehicle state estimation,” IEEE Trans. Instrumentation and Measurement, vol. 70, pp. 1–12, 2021.
|
| [6] |
Z. Gao and G. Guo, “Fixed-time sliding mode formation control of AUVs based on a disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 539–545, 2020. doi: 10.1109/JAS.2020.1003057
|
| [7] |
S. C. Martin and L. L. Whitcomb, “Nonlinear model-based tracking control of underwater vehicles with three degree-of-freedom fully coupled dynamical plant models: Theory and experimental evaluation,” IEEE Trans. Control Systems Technology, vol. 26, no. 2, pp. 404–414, 2018. doi: 10.1109/TCST.2017.2665974
|
| [8] |
X. Yu and J. Jiang, “A survey of fault-tolerant controllers based on safety-related issues,” Annual Reviews in Control, vol. 39, pp. 46–57, 2015. doi: 10.1016/j.arcontrol.2015.03.004
|
| [9] |
G. Dong, L. Cao, D. Yao, H. Li, and R. Lu, “Adaptive attitude control for multi-MUAV systems with output dead-zone and actuator fault,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 9, pp. 1567–1575, 2021. doi: 10.1109/JAS.2020.1003605
|
| [10] |
H. Fan, B. Liu, Y. Shen, and W. Wang, “Adaptive failure compensation control for uncertain systems with stochastic actuator failures,” IEEE Trans. Autom. Control, vol. 59, no. 3, pp. 808–814, 2014. doi: 10.1109/TAC.2013.2287115
|
| [11] |
B. Xian and W. Hao, “Nonlinear robust fault-tolerant control of the tilt trirotor UAV under rear servo’s stuck fault: Theory and experiments,” IEEE Trans. Industrial Informatics, vol. 15, no. 4, pp. 2158–2166, 2019. doi: 10.1109/TII.2018.2858143
|
| [12] |
T. Berger, “Fault-tolerant funnel control for uncertain linear systems,” IEEE Trans. Autom. Control, vol. 66, no. 9, pp. 4349–4356, 2021. doi: 10.1109/TAC.2020.3030759
|
| [13] |
H. Wang, W. Bai, and P. X. Liu, “Finite-time adaptive fault-tolerant control for nonlinear systems with multiple faults,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 6, pp. 1417–1427, 2019. doi: 10.1109/JAS.2019.1911765
|
| [14] |
L. Hao, H. Zhang, G. Guo, and H. Li, “Quantized sliding mode control of unmanned marine vehicles: Various thruster faults tolerated with a unified model,” IEEE Trans. Systems,Man,and Cyber.: Systems, vol. 51, no. 3, pp. 2012–2026, 2021.
|
| [15] |
X. Wang and C. P. Tan, “Dynamic output feedback fault tolerant control for unmanned underwater vehicles,” IEEE Trans. Vehicular Technology, vol. 69, no. 4, pp. 3693–3702, 2020. doi: 10.1109/TVT.2019.2957529
|
| [16] |
D. Li, Y. Wang, J. Wang, C. Wang, and Y. Duan, “Recent advances in sensor fault diagnosis: A review,” Sensors and Actuators A: Physical, vol. 309, p. 111990, 2020. doi: 10.1016/j.sna.2020.111990
|
| [17] |
Y. Wang, W. Zhou, J. Luo, H. Yan, H. Pu, and Y. Peng, “Reliable intelligent path following control for a robotic airship against sensor faults,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 6, pp. 2572–2582, 2019. doi: 10.1109/TMECH.2019.2929224
|
| [18] |
H. Wang, Y. Kang, L. Yao, H. Wang, and Z. Gao, “Fault diagnosis and fault tolerant control for T-S fuzzy stochastic distribution systems subject to sensor and actuator faults,” IEEE Trans. Fuzzy Systems, vol. 29, no. 11, pp. 3561–3569, 2021. doi: 10.1109/TFUZZ.2020.3024659
|
| [19] |
S. Saeed Nasrolahi, F. Abdollahi, and H. Rezaee, “Decentralized active sensor fault tolerance in attitude control of satellite formation flying,” Int. J. Robust and Nonlinear Control, vol. 30, no. 18, pp. 8340–8361, 2020. doi: 10.1002/rnc.5245
|
| [20] |
X. Zhang, T. Parisini, and M. Polycarpou, “Sensor bias fault isolation in a class of nonlinear systems,” IEEE Trans. Autom. Control, vol. 50, no. 3, pp. 370–376, 2005. doi: 10.1109/TAC.2005.843875
|
| [21] |
M. Liu and P. Shi, “Sensor fault estimation and tolerant control for Itô stochastic systems with a descriptor sliding mode approach,” Automatica, vol. 49, no. 5, pp. 1242–1250, 2013. doi: 10.1016/j.automatica.2013.01.030
|
| [22] |
Z. Zuo, C. Liu, Q.-L. Han, and J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, 2022. doi: 10.1109/JAS.2022.105410
|
| [23] |
J. Liu, Y. Wu, M. Sun, and C. Sun, “Fixed-time cooperative tracking for delayed disturbed multi-agent systems under dynamic event-triggered control,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 930–933, 2022. doi: 10.1109/JAS.2022.105503
|
| [24] |
J. Liu, Y. Zhang, Y. Yu, and C. Sun, “Fixed-time event-triggered consensus for nonlinear multiagent systems without continuous communications,” IEEE Trans. Systems,Man,and Cyber.: Systems, vol. 49, no. 11, pp. 2221–2229, 2019. doi: 10.1109/TSMC.2018.2876334
|
| [25] |
X. Liu, M. Zhang, Y. Wang, and E. Rogers, “Design and experimental validation of an adaptive sliding mode observer-based fault-tolerant control for underwater vehicles,” IEEE Trans. Control Systems Technology, vol. 27, no. 6, pp. 2655–2662, 2019. doi: 10.1109/TCST.2018.2870829
|
| [26] |
X. Wang, “Active fault tolerant control for unmanned underwater vehicle with actuator fault and guaranteed transient performance,” IEEE Trans. Intelligent Vehicles, vol. 6, no. 3, pp. 470–479, 2021. doi: 10.1109/TIV.2020.3038785
|
| [27] |
B. Xian, M. S. De Queiroz, and D. M. Dawson, “A continuous control mechanism for uncertain nonlinear systems, ” in Proc. Optimal Control, Stabilization and Nonsmooth Analysis. Dordrecht, The Netherlands: Springer, 2004, pp. 251–264.
|
| [28] |
Z. Shen, Q. Wang, S. Dong, and H. Yu, “Prescribed performance dynamic surface control for trajectory-tracking of unmanned surface vessel with input saturation,” Applied Ocean Research, vol. 113, p. 102736, 2021. doi: 10.1016/j.apor.2021.102736
|
| [29] |
H. Qin, C. Li, Y. Sun, X. Li, Y. Du, and Z. Deng, “Finite-time trajectory tracking control of unmanned surface vessel with error constraints and input saturations,” J. Franklin Institute, vol. 357, p. 16, 2020.
|
| [30] |
R. Rout, R. Cui, and Z. Han, “Modified line-of-sight guidance law with adaptive neural network control of underactuated marine vehicles with state and input constraints,” IEEE Trans. Control Systems Technology, vol. 28, no. 5, pp. 1902–1914, 2020. doi: 10.1109/TCST.2020.2998798
|
| [31] |
L. Zhang and G. Yang, “Adaptive fuzzy fault compensation tracking control for uncertain nonlinear systems with multiple sensor faults,” Fuzzy Sets and Systems, vol. 392, pp. 46–59, 2020. doi: 10.1016/j.fss.2019.08.010
|
| [32] |
D. Zhai, L. An, J. Dong, and Q. Zhang, “Output feedback adaptive sensor failure compensation for a class of parametric strict feedback systems,” Automatica, vol. 97, pp. 48–57, 2018. doi: 10.1016/j.automatica.2018.07.014
|
| [33] |
X. Yang, J. Yan, C. Hua, and X. Guan, “Trajectory tracking control of autonomous underwater vehicle with unknown parameters and external disturbances,” IEEE Trans. Systems,Man,and Cyber.: Systems, vol. 51, no. 2, pp. 1054–1063, 2021. doi: 10.1109/TSMC.2019.2894171
|
| [34] |
J. Zhang and G. Yang, “Fault-tolerant fixed-time trajectory tracking control of autonomous surface vessels with specified accuracy,” IEEE Trans. Industrial Electronics, vol. 67, no. 6, pp. 4889–4899, 2020. doi: 10.1109/TIE.2019.2931242
|
| [35] |
W. Shi, S. Song, C. Wu, and C. L. P. Chen, “Multi pseudo Q-learning-based deterministic policy gradient for tracking control of autonomous underwater vehicles,” IEEE Trans. Neural Networks and Learning Systems, vol. 30, no. 12, pp. 3534–3546, 2019. doi: 10.1109/TNNLS.2018.2884797
|
| [36] |
H. Tan, R. Diamant, W. K. Seah, and M. Waldmeyer, “A survey of techniques and challenges in underwater localization,” Ocean Engineering, vol. 38, no. 14, pp. 1663–1676, 2011.
|
| [37] |
N. Fischer, Z. Kan, R. Kamalapurkar, and W. E. Dixon, “Saturated RISE feedback control for a class of second-order nonlinear systems,” IEEE Trans. Autom. Control, vol. 59, no. 4, pp. 1094–1099, 2014. doi: 10.1109/TAC.2013.2286913
|
| [38] |
P. M. Patre, W. MacKunis, K. Kaiser, and W. E. Dixon, “Asymptotic tracking for uncertain dynamic systems via a multilayer neural network feedforward and RISE feedback control structure,” IEEE Trans. Autom. Control, vol. 53, no. 9, pp. 2180–2185, 2008. doi: 10.1109/TAC.2008.930200
|
| [39] |
M. Liu, X. Cao, and P. Shi, “Fuzzy-model-based fault-tolerant design for nonlinear stochastic systems against simultaneous sensor and actuator faults,” IEEE Trans. Fuzzy Systems, vol. 21, no. 5, pp. 789–799, 2013. doi: 10.1109/TFUZZ.2012.2224872
|
| [40] |
L. Cao, H. Li, G. Dong, and R. Lu, “Event-triggered control for multiagent systems with sensor faults and input saturation,” IEEE Trans. Systems,Man,and Cyber.: Systems, vol. 51, no. 6, pp. 3855–3866, 2021. doi: 10.1109/TSMC.2019.2938216
|
| [41] |
H. Khebbache, M. Tadjine, S. Labiod, and A. Boulkroune, “Adaptive sensor-fault tolerant control for a class of multivariable uncertain nonlinear systems,” ISA Trans., vol. 55, pp. 100–115, 2015. doi: 10.1016/j.isatra.2014.10.001
|
| [42] |
Z. Zheng, Y. Huang, L. Xie, and B. Zhu, “Adaptive trajectory tracking control of a fully actuated surface vessel with asymmetrically constrained input and output,” IEEE Trans. Control Systems Technology, vol. 26, no. 5, pp. 1851–1859, 2018. doi: 10.1109/TCST.2017.2728518
|
| [43] |
Y. Yang, J. Tan, and D. Yue, “Prescribed performance control of one-dof link manipulator with uncertainties and input saturation constraint,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 148–157, 2019. doi: 10.1109/JAS.2018.7511099
|
| [44] |
W. He, Y. Dong, and C. Sun, “Adaptive neural impedance control of a robotic manipulator with input saturation,” IEEE Trans. Systems,Man,and Cyber.: Systems, vol. 46, no. 3, pp. 334–344, 2016. doi: 10.1109/TSMC.2015.2429555
|
| [45] |
Y. Ouyang, L. Dong, Y. Wei, and C. Sun, “Neural network based tracking control for an elastic joint robot with input constraint via actor-critic design,” Neurocomputing, vol. 409, pp. 286–295, 2020. doi: 10.1016/j.neucom.2020.05.067
|
| [46] |
M. Chen, S. S. Ge, and B. Ren, “Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints,” Automatica, vol. 47, no. 3, pp. 452–465, 2011. doi: 10.1016/j.automatica.2011.01.025
|
| [47] |
K. Yong, M. Chen, Y. Shi, and Q. Wu, “Flexible performance-based robust control for a class of nonlinear systems with input saturation,” Automatica, vol. 122, p. 109268, 2020. doi: 10.1016/j.automatica.2020.109268
|
| [48] |
B. Xian, D. M. Dawson, M. S. de Queiroz, and J. Chen, “A continuous asymptotic tracking control strategy for uncertain nonlinear systems,” IEEE Trans. Autom. Control, vol. 49, no. 7, pp. 1206–1211, 2004. doi: 10.1109/TAC.2004.831148
|
| [49] |
T. K. Podder and N. Sarkar, “Fault-tolerant control of an autonomous underwater vehicle under thruster redundancy,” Robotics and Autonomous Systems, vol. 34, no. 1, pp. 39–52, 2001. doi: 10.1016/S0921-8890(00)00100-7
|
| [50] |
K. Do, “Global tracking control of underactuated ODINs in three-dimensional space,” Int. J. Control, vol. 86, no. 2, pp. 183–196, 2013. doi: 10.1080/00207179.2012.721567
|
| [51] |
S. Choi, J. Yuh, and G. Takashige, “Development of the Omni Directional Intelligent Navigator,” IEEE Robotics &Automation Magazine, vol. 2, no. 1, pp. 44–53, 1995.
|
| [52] |
C.-S. Chiu, “Derivative and integral terminal sliding mode control for a class of MIMO nonlinear systems,” Automatica, vol. 48, no. 2, pp. 316–326, 2012. doi: 10.1016/j.automatica.2011.08.055
|
| [53] |
L. Qiao and W. Zhang, “Adaptive non-singular integral terminal sliding mode tracking control for autonomous underwater vehicles,” IET Control Theory &Applications, vol. 11, no. 8, pp. 1293–1306, 2017.
|
| [54] |
L. Qiao and W. Zhang, “Trajectory tracking control of AUVs via adaptive fast nonsingular integral terminal sliding mode control,” IEEE Trans. Industrial Informatics, vol. 16, no. 2, pp. 1248–1258, 2020. doi: 10.1109/TII.2019.2949007
|
| [55] |
L. Qiao and W. Zhang, “Double-loop integral terminal sliding mode tracking control for UUVs with adaptive dynamic compensation of uncertainties and disturbances,” IEEE J. Oceanic Engineering, vol. 44, no. 1, pp. 29–53, 2019. doi: 10.1109/JOE.2017.2777638
|
Figures(7)






 DownLoad:
DownLoad: