A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 3
Volume 11
Issue 3
IEEE/CAA Journal of Automatica Sinica
| Citation: | S. Cao, Z. Luo, and C. Quan, “Sequential inverse optimal control of discrete-time systems,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 3, pp. 608–621, Mar. 2024. doi: 10.1109/JAS.2023.123762

|
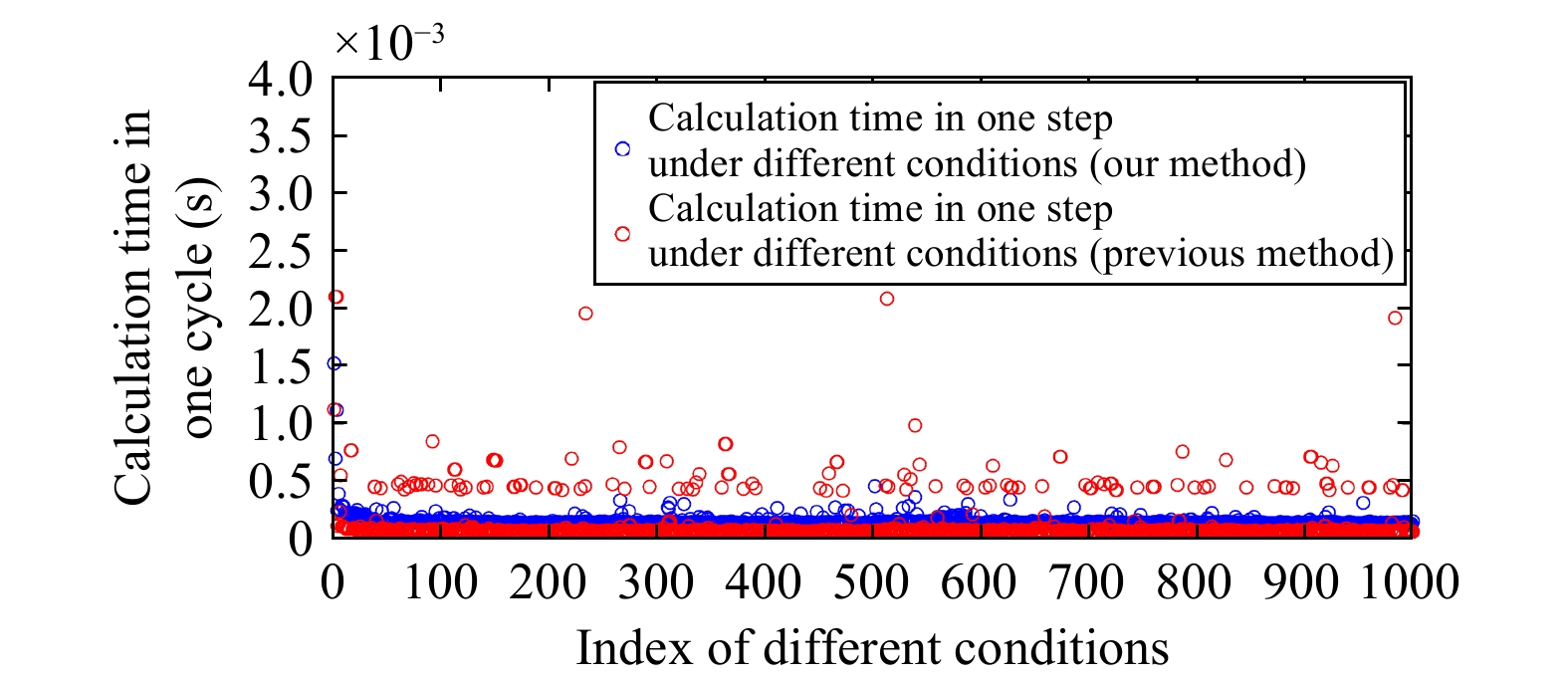
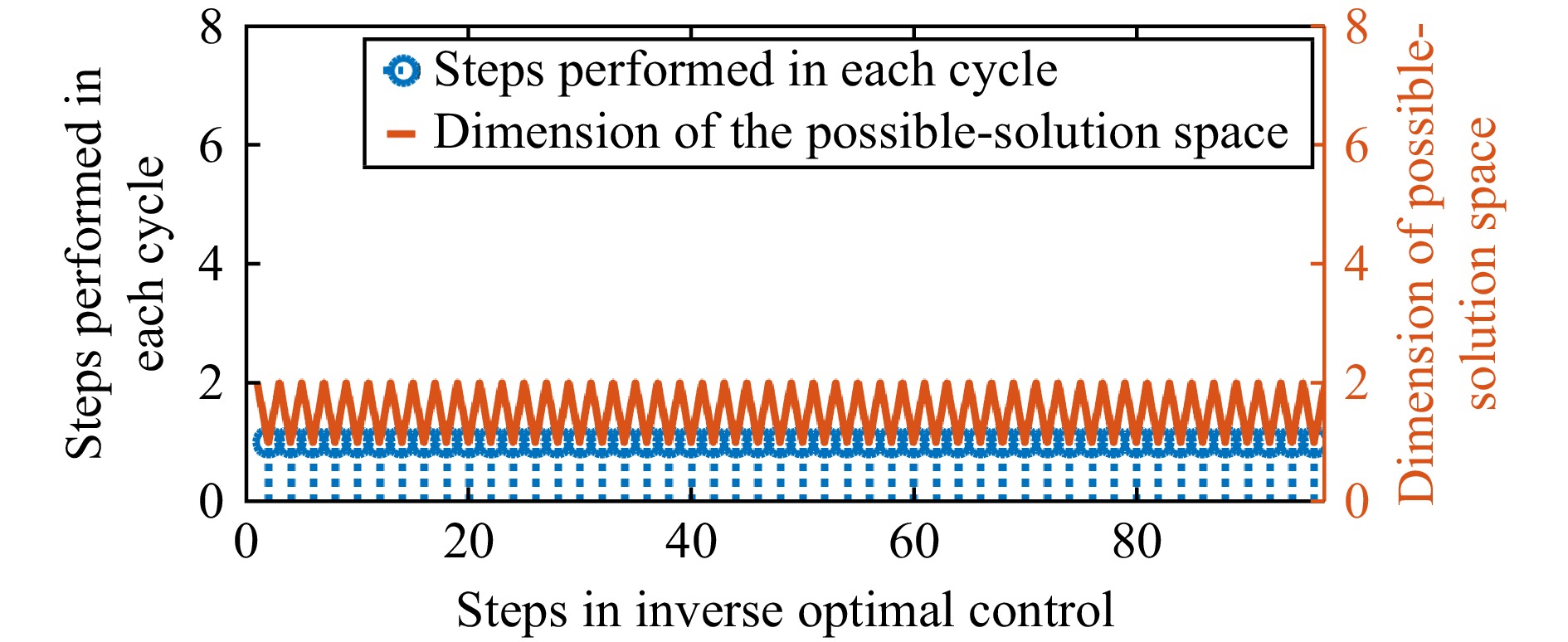
This paper presents a novel sequential inverse optimal control (SIOC) method for discrete-time systems, which calculates the unknown weight vectors of the cost function in real time using the input and output of an optimally controlled discrete-time system. The proposed method overcomes the limitations of previous approaches by eliminating the need for the invertible Jacobian assumption. It calculates the possible-solution spaces and their intersections sequentially until the dimension of the intersection space decreases to one. The remaining one-dimensional vector of the possible-solution space’s intersection represents the SIOC solution. The paper presents clear conditions for convergence and addresses the issue of noisy data by clarifying the conditions for the singular values of the matrices that relate to the possible-solution space. The effectiveness of the proposed method is demonstrated through simulation results.

| [1] |
Y. Li, K. P. Tee, R. Yan, W. L. Chan, and Y. Wu, “A framework of human-robot coordination based on game theory and policy iteration,” IEEE Trans. Robot., vol. 32, no. 6, pp. 1408–1418, Dec. 2016. doi: 10.1109/TRO.2016.2597322
|
| [2] |
N. Aghasadeghi and T. Bretl, “Inverse optimal control for differentially flat systems with application to locomotion modeling,” in Proc. IEEE Int. Conf. Robotics and Automation, Hong Kong, China, 2014, pp. 6018–6025.
|
| [3] |
K. Mombaur, A. Truong, and J.-P. Laumond, “From human to humanoid locomotion—An inverse optimal control approach,” Auton. Robots, vol. 28, no. 3, pp. 369–383, Apr. 2010. doi: 10.1007/s10514-009-9170-7
|
| [4] |
J. Saez-Gallego, J. M. Morales, M. Zugno, and H. Madsen, “A data-driven bidding model for a cluster of price-responsive consumers of electricity,” IEEE Trans. Power Syst., vol. 31, no. 6, pp. 5001–5011, Nov. 2016. doi: 10.1109/TPWRS.2016.2530843
|
| [5] |
B. D. Ziebart, A. Maas, J. A. Bagnell, and A. K. Dey, “Human behavior modeling with maximum entropy inverse optimal control,” in Proc. AAAI Spring Symp.-Human Behavior Modeling, Stanford, USA, 2009.
|
| [6] |
B. Berret, E. Chiovetto, F. Nori, and T. Pozzo, “Evidence for composite cost functions in arm movement planning: An inverse optimal control approach,” PLoS Comput. Biol., vol. 7, no. 10, p. e1002183, Oct. 2011. doi: 10.1371/journal.pcbi.1002183
|
| [7] |
H. El-Hussieny, A. A. Abouelsoud, S. F. M. Assal, and S. M. Megahed, “Adaptive learning of human motor behaviors: An evolving inverse optimal control approach,” Eng. Appl. Artif. Intell., vol. 50, pp. 115–124, Apr. 2016. doi: 10.1016/j.engappai.2016.01.024
|
| [8] |
B. D. Ziebart, A. L. Maas, J. A. Bagnell, and A. K. Dey, “Maximum entropy inverse reinforcement learning,” in Proc. 23rd Nat. Conf. Artificial Intelligence, Chicago, USA, 2008, pp. 1433–1438.
|
| [9] |
S. Dempe, Foundations of Bilevel Programming. New York, USA: Springer, 2002.
|
| [10] |
K. Hatz, J. P. Schlöder, and H. G. Bock, “Estimating parameters in optimal control problems,” SIAM J. Sci. Comput., vol. 34, no. 3, pp. A1707–A1728, Jan. 2012. doi: 10.1137/110823390
|
| [11] |
S. Albrecht and M. Ulbrich, “Mathematical programs with complementarity constraints in the context of inverse optimal control for locomotion,” Optim. Methods Software, vol. 32, no. 4, pp. 670–698, Aug. 2017. doi: 10.1080/10556788.2016.1225212
|
| [12] |
S. Dempe, F. Harder, P. Mehlitz, and G. Wachsmuth, “Solving inverse optimal control problems via value functions to global optimality,” J. Glob. Optim., vol. 74, no. 2, pp. 297–325, Jun. 2019. doi: 10.1007/s10898-019-00758-1
|
| [13] |
A. E. Bryson and Y. C. Ho, Applied Optimal Control: Optimization, Estimation and Control. Routledge, 2018.
|
| [14] |
M. Johnson, N. Aghasadeghi, and T. Bretl, “Inverse optimal control for deterministic continuous-time nonlinear systems,” in Proc. 52nd IEEE Conf. Decision and Control, Firenze, Italy, 2013, pp. 2906–2913.
|
| [15] |
T. L. Molloy, J. J. Ford, and T. Perez, “Finite-horizon inverse optimal control for discrete-time nonlinear systems,” Automatica, vol. 87, pp. 442–446, Jan. 2018. doi: 10.1016/j.automatica.2017.09.023
|
| [16] |
T. L. Molloy, J. J. Ford, and T. Perez, “Online inverse optimal control for control-constrained discrete-time systems on finite and infinite horizons,” Automatica, vol. 120, p. 109109, Oct. 2020. doi: 10.1016/j.automatica.2020.109109
|
| [17] |
M. Almobaied, I. Eksin, and M. Guzelkaya, “A new inverse optimal control method for discrete-time systems,” in Proc. 12th Int. Conf. Informatics in Control, Automation and Robotics, Colmar, France, 2015, pp. 275–280.
|
| [18] |
M. Almobaied, I. Eksin, and M. Guzelkaya, “Inverse optimal controller based on extended Kalman filter for discrete-time nonlinear systems,” Optim. Control Appl. Methods, vol. 39, no. 1, pp. 19–34, Jan.–Feb. 2018. doi: 10.1002/oca.2331
|
| [19] |
P. Prasanna, J. Jacob, and M. P. Nandakumar, “Inverse optimal control of a class of affine nonlinear systems,” Trans. Inst. Meas. Control, vol. 41, no. 9, pp. 2637–2650, Feb. 2019. doi: 10.1177/0142331218806338
|
| [20] |
B. Huang, X. Ma, and U. Vaidya, “Data-driven nonlinear stabilization using Koopman operator,” in The Koopman Operator in Systems and Control: Concepts, Methodologies, and Applications, A. Mauroy, I. Mezić, and Y. Susuki, Eds. Cham, Switzerland: Springer, 2020, pp. 313–334.
|
| [21] |
S. M. Khansari-Zadeh and A. Billard, “Learning control Lyapunov function to ensure stability of dynamical system-based robot reaching motions,” Rob. Auton. Syst., vol. 62, no. 6, pp. 752–765, Jun. 2014. doi: 10.1016/j.robot.2014.03.001
|
| [22] |
H. Ravanbakhsh and S. Sankaranarayanan, “Learning control Lyapunov functions from counterexamples and demonstrations,” Auton. Robots, vol. 43, no. 2, pp. 275–307, Feb. 2019. doi: 10.1007/s10514-018-9791-9
|
| [23] |
Y. C. Chang, N. Roohi, and S. Gao, “Neural Lyapunov control,” Advances in Neural Information Processing Systems, vol. 32, 2019.
|
| [24] |
H. Zhang, J. Umenberger, and X. Hu, “Inverse optimal control for discrete-time finite-horizon linear quadratic regulators,” Automatica, vol. 110, p. 108593, Dec. 2019. doi: 10.1016/j.automatica.2019.108593
|
| [25] |
C. Yu, Y. Li, H. Fang, and J. Chen, “System identification approach for inverse optimal control of finite-horizon linear quadratic regulators,” Automatica, vol. 129, p. 109636, Jul. 2021. doi: 10.1016/j.automatica.2021.109636
|
| [26] |
A. Keshavarz, Y. Wang, and S. Boyd, “Imputing a convex objective function,” in Proc. IEEE Int. Symp. Intelligent Control, Denver, USA, 2011, pp. 613–619.
|
| [27] |
M. Schultheis, D. Straub, and C. A. Rothkopf, “Inverse optimal control adapted to the noise characteristics of the human sensorimotor system,” Advances in Neural Information Processing Systems, vol. 34, pp. 9429–9442, 2021.
|
| [28] |
J. Blot, and N. Hayek, Infinite-Horizon Optimal Control in the Discrete-Time Framework. New York, USA: Springer, 2014.
|
| [29] |
D. P. Bertsekas, Dynamic Programming and Optimal Control, Vol. 1. 2nd ed. Belmont, USA: Athena Scientific, 2000.
|
| [30] |
J. Blot and H. Chebbi, “Discrete time Pontryagin principles with infinite horizon,” J. Math. Anal. Appl., vol. 246, no. 1, pp. 265–279, Jun. 2000. doi: 10.1006/jmaa.2000.6797
|
| [31] |
W. Jin, D. Kulić, J. F.-S. Lin, S. Mou, and S. Hirche, “Inverse optimal control for multiphase cost functions,” IEEE Trans. Robot., vol. 35, no. 6, pp. 1387–1398, Dec. 2019. doi: 10.1109/TRO.2019.2926388
|
Figures(10)






 DownLoad:
DownLoad: