A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 4
Volume 11
Issue 4
IEEE/CAA Journal of Automatica Sinica
| Citation: | L.-Y. Hao, G. Dong, T. Li, and Z. Peng, “Path-following control with obstacle avoidance of autonomous surface vehicles subject to actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 4, pp. 956–964, Apr. 2024. doi: 10.1109/JAS.2023.123675

|
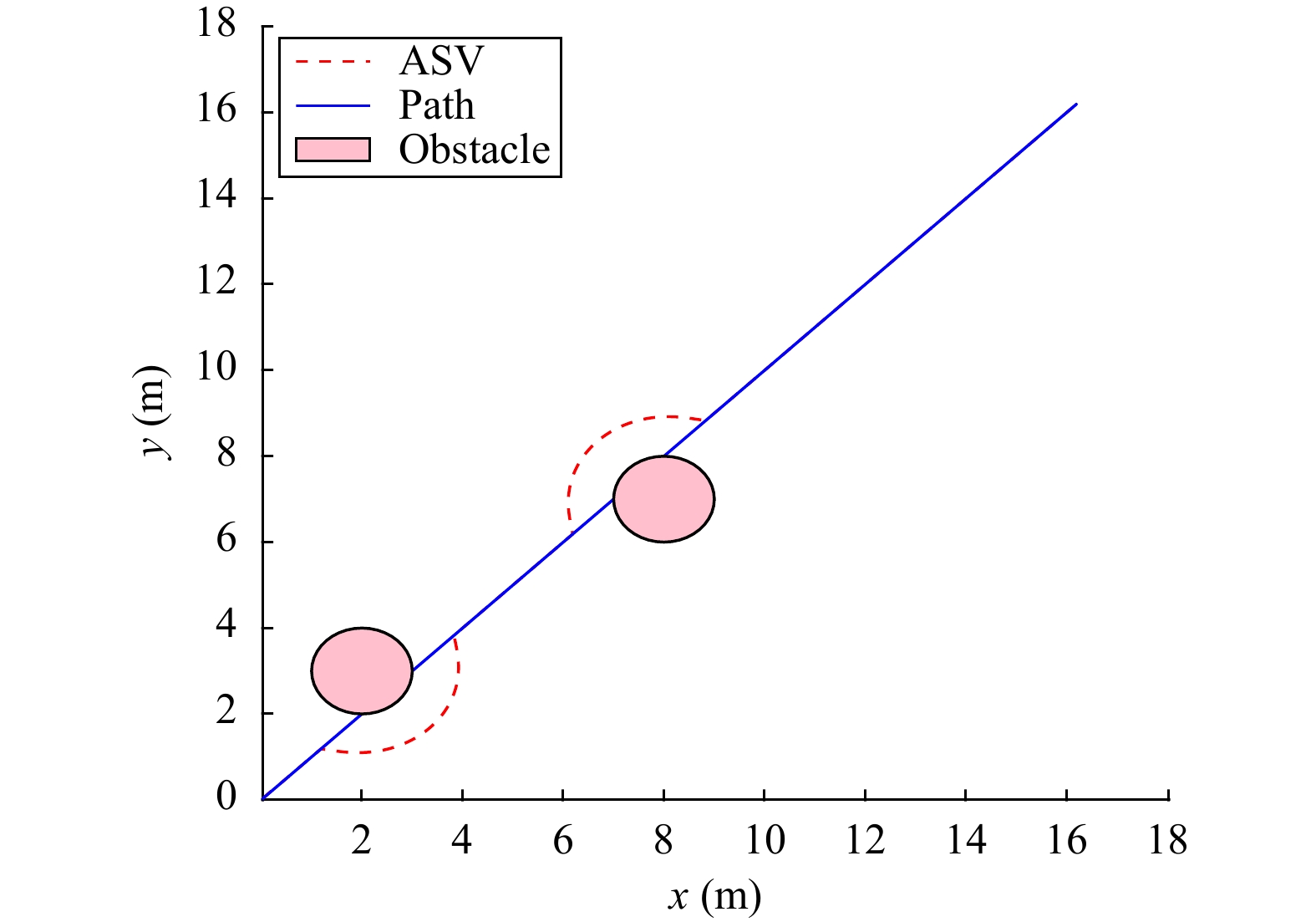
This paper investigates the path-following control problem with obstacle avoidance of autonomous surface vehicles in the presence of actuator faults, uncertainty and external disturbances. Autonomous surface vehicles inevitably suffer from actuator faults in complex sea environments, which may cause existing obstacle avoidance strategies to fail. To reduce the influence of actuator faults, an improved artificial potential function is constructed by introducing the lower bound of actuator efficiency factors. The nonlinear state observer, which only depends on measurable position information of the autonomous surface vehicle, is used to address uncertainties and external disturbances. By using a backstepping technique and adaptive mechanism, a path-following control strategy with obstacle avoidance and fault tolerance is designed which can ensure that the tracking errors converge to a small neighborhood of zero. Compared with existing results, the proposed control strategy has the capability of obstacle avoidance and fault tolerance simultaneously. Finally, the comparison results through simulations are given to verify the effectiveness of the proposed method.

| [1] |
Y.-L. Wang and Q.-L. Han, “Network-based modelling and dynamic output feedback control for unmanned marine vehicles in network environments,” Automatica, vol. 91, pp. 43–53, 2018. doi: 10.1016/j.automatica.2018.01.026
|
| [2] |
Z. Liu, Y. Zhang, X. Yu, and C. Yuan, “Unmanned surface vehicles: An overview of developments and challenges,” Annual Reviews in Control, vol. 41, pp. 71–93, 2016. doi: 10.1016/j.arcontrol.2016.04.018
|
| [3] |
Y. Shi, C. Shen, H. Fang, and H. Li, “Advanced control in marine mechatronic systems: A survey,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 3, pp. 1121–1131, 2017. doi: 10.1109/TMECH.2017.2660528
|
| [4] |
C. Hu, R. Wang, F. Yan, and N. Chen, “Robust composite nonlinear feedback path-following control for underactuated surface vessels with desired-heading amendment,” IEEE Trans. Industrial Electronics, vol. 63, no. 10, pp. 6386–6394, 2016. doi: 10.1109/TIE.2016.2573240
|
| [5] |
Z. Peng, J. Wang, and D. Wang, “Distributed maneuvering of autonomous surface vehicles based on neurodynamic optimization and fuzzy approximation,” IEEE Trans. Control Systems Technology, vol. 26, no. 3, pp. 1083–1090, 2017.
|
| [6] |
Z. Peng, M. Lv, L. Liu, and D. Wang, “Data-driven learning extended state observers for nonlinear systems: Design, analysis and hardware-in-loop simulations,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 1, pp. 290–293, 2023. doi: 10.1109/JAS.2023.123051
|
| [7] |
G. V. Lakhekar, L. M. Waghmare, and R. G. Roy, “Disturbance observer-based fuzzy adapted S-surface controller for spatial trajectory tracking of autonomous underwater vehicle,” IEEE Trans. Intelligent Vehicles, vol. 4, no. 4, pp. 622–636, 2019. doi: 10.1109/TIV.2019.2938082
|
| [8] |
H. Katayama and H. Aoki, “Straight-line trajectory tracking control for sampled-data underactuated ships,” IEEE Trans. Control Systems Technology, vol. 22, no. 4, pp. 1638–1645, 2013.
|
| [9] |
Y. Deng and X. Zhang, “Event-triggered composite adaptive fuzzy output-feedback control for path following of autonomous surface vessels,” IEEE Trans. Fuzzy Systems, vol. 29, no. 9, pp. 2701–2713, 2020.
|
| [10] |
N. Gu, Z. Peng, D. Wang, Y. Shi, and T. Wang, “Antidisturbance coordinated path following control of robotic autonomous surface vehicles: Theory and experiment,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 5, pp. 2386–2396, 2019.
|
| [11] |
N. Gu, D. Wang, Z. Peng, and L. Liu, “Adaptive bounded neural network control for coordinated path-following of networked underactuated autonomous surface vehicles under time-varying state-dependent cyber-attack,” ISA Transactions, vol. 104, pp. 212–221, 2020. doi: 10.1016/j.isatra.2018.12.051
|
| [12] |
K. Okamoto, L. Itti, and P. Tsiotras, “Vision-based autonomous path following using a human driver control model with reliable input-feature value estimation,” IEEE Trans. Intelligent Vehicles, vol. 4, no. 3, pp. 497–506, 2019. doi: 10.1109/TIV.2019.2919476
|
| [13] |
Z. Peng, J. Wang, and Q.-L. Han, “Path-following control of autonomous underwater vehicles subject to velocity and input constraints via neurodynamic optimization,” IEEE Trans. Industrial Electronics, vol. 66, no. 11, pp. 8724–8732, 2019. doi: 10.1109/TIE.2018.2885726
|
| [14] |
Z. Zuo, J. Song, and Q.-L. Han, “Coordinated planar path-following control for multiple nonholonomic wheeled mobile robots,” IEEE Trans. Cybernetics, vol. 52, no. 9, pp. 9404–9413, 2022. doi: 10.1109/TCYB.2021.3057335
|
| [15] |
Z. Peng, L. Liu, and J. Wang, “Output-feedback flocking control of multiple autonomous surface vehicles based on data-driven adaptive extended state observers,” IEEE Trans. Cybernetics, vol. 51, no. 9, pp. 4611–4622, 2020.
|
| [16] |
L.-Y. Hao, H. Zhang, G. Guo, and H. Li, “Quantized sliding mode control of unmanned marine vehicles: Various thruster faults tolerated with a unified model,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 51, no. 3, pp. 2012–2026, 2021.
|
| [17] |
Y.-L. Wang and Q.-L. Han, “Network-based heading control and rudder oscillation reduction for unmanned surface vehicles,” IEEE Trans. Control Systems Technology, vol. 25, no. 5, pp. 1609–1620, 2016.
|
| [18] |
Z.-G. Wu, S. Dong, P. Shi, H. Su, and T. Huang, “Reliable filtering of nonlinear Markovian jump systems: The continuous-time case,” IEEE Trans. Systems,Man,and Cybernetics: Systems, vol. 49, no. 2, pp. 386–394, 2017.
|
| [19] |
Y.-L. Wang and Q.-L. Han, “Network-based fault detection filter and controller coordinated design for unmanned surface vehicles in network environments,” IEEE Trans. Industrial Informatics, vol. 12, no. 5, pp. 1753–1765, 2016. doi: 10.1109/TII.2016.2526648
|
| [20] |
J.-X. Zhang and G.-H. Yang, “Fault-tolerant fixed-time trajectory tracking control of autonomous surface vessels with specified accuracy,” IEEE Trans. Industrial Electronics, vol. 67, no. 6, pp. 4889–4899, 2019.
|
| [21] |
X. Jin, “Fault tolerant finite-time leader-follower formation control for autonomous surface vessels with LOS range and angle constraints,” Automatica, vol. 68, pp. 228–236, 2016. doi: 10.1016/j.automatica.2016.01.064
|
| [22] |
Y. Lu, X. Xu, L. Qiao, and W. Zhang, “Robust adaptive formation tracking of autonomous surface vehicles with guaranteed performance and actuator faults,” Ocean Engineering, vol. 237, p. 109592, 2021. doi: 10.1016/j.oceaneng.2021.109592
|
| [23] |
T. A. Johansen and T. I. Fossen, “Control allocation–A survey,” Automatica, vol. 49, no. 5, pp. 1087–1103, 2013. doi: 10.1016/j.automatica.2013.01.035
|
| [24] |
M. Blanke and D. T. Nguyen, “Fault tolerant position-mooring control for offshore vessels,” Ocean Engineering, vol. 148, pp. 426–441, 2018. doi: 10.1016/j.oceaneng.2017.11.042
|
| [25] |
L. Cavanini and G. Ippoliti, “Fault tolerant model predictive control for an over-actuated vessel,” Ocean Engineering, vol. 160, pp. 1–9, 2018. doi: 10.1016/j.oceaneng.2018.04.045
|
| [26] |
L.-Y. Hao, Y. Yu, T.-S. Li, and H. Li, “Quantized output-feedback control for unmanned marine vehicles with thruster faults via sliding-mode technique,” IEEE Trans. Cybernetics, vol. 52, no. 9, pp. 9363–9376, 2022. doi: 10.1109/TCYB.2021.3050003
|
| [27] |
L.-Y. Hao, H. Zhang, T.-S. Li, B. Lin, and C. P. Chen, “Fault tolerant control for dynamic positioning of unmanned marine vehicles based on ts fuzzy model with unknown membership functions,” IEEE Trans. Vehicular Technology, vol. 70, no. 1, pp. 146–157, 2021. doi: 10.1109/TVT.2021.3050044
|
| [28] |
J. Qi, J. Guo, M. Wang, C. Wu, and Z. Ma, “Formation tracking and obstacle avoidance for multiple quadrotors with static and dynamic obstacles,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 1713–1720, 2022. doi: 10.1109/LRA.2022.3140830
|
| [29] |
B. Guo, N. Guo, and Z. Cen, “Obstacle avoidance with dynamic avoidance risk region for mobile robots in dynamic environments,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 5850–5857, 2022. doi: 10.1109/LRA.2022.3161710
|
| [30] |
Y. Xu, L. Liu, N. Gu, D. Wang, and Z. Peng, “Multi-ASV collision avoidance for point-to-point transitions based on heading-constrained control barrier functions with experiment,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 6, pp. 1494–1497, 2023.
|
| [31] |
S. Gao, Z. Peng, H. Wang, L. Liu, and D. Wang, “Safety-critical model-free control for multi-target tracking of USVs with collision avoidance,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 7, pp. 1323–1326, 2022. doi: 10.1109/JAS.2022.105707
|
| [32] |
B. S. Park and S. J. Yoo, “Connectivity-maintaining obstacle avoidance approach for leader-follower formation tracking of uncertain multiple nonholonomic mobile robots,” Expert Systems with Applications, vol. 171, p. 114589, 2021. doi: 10.1016/j.eswa.2021.114589
|
| [33] |
S. Mastellone, D. M. Stipanović, C. R. Graunke, K. A. Intlekofer, and M. W. Spong, “Formation control and collision avoidance for multi-agent non-holonomic systems: Theory and experiments,” The Int. Journal of Robotics Research, vol. 27, no. 1, pp. 107–126, 2008. doi: 10.1177/0278364907084441
|
| [34] |
M. Faisal, R. Hedjar, M. Al Sulaiman, and K. Al-Mutib, “Fuzzy logic navigation and obstacle avoidance by a mobile robot in an unknown dynamic environment,” Int. Journal of Advanced Robotic Systems, vol. 10, no. 1, pp. 1–7, 2013. doi: 10.5772/52938
|
| [35] |
G. Fedele, L. D’Alfonso, F. Chiaravalloti, and G. D’Aquila, “Obstacles avoidance based on switching potential functions,” Journal of Intelligent &Robotic Systems, vol. 90, no. 3, pp. 387–405, 2018.
|
| [36] |
D. Wang, Q. Zong, B. Tian, H. Lu, and J. Wang, “Adaptive finite-time reconfiguration control of unmanned aerial vehicles with a moving leader,” Nonlinear Dynamics, vol. 95, no. 2, pp. 1099–1116, 2019. doi: 10.1007/s11071-018-4618-y
|
| [37] |
M. C. P. Santos, C. D. Rosales, M. Sarcinelli-Filho, and R. Carelli, “A novel null-space-based UAV trajectory tracking controller with collision avoidance,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 6, pp. 2543–2553, 2017. doi: 10.1109/TMECH.2017.2752302
|
| [38] |
Z. Peng, D. Wang, T. Li, and M. Han, “Output-feedback cooperative formation maneuvering of autonomous surface vehicles with connectivity preservation and collision avoidance,” IEEE Trans. Cybernetics, vol. 50, no. 6, pp. 2527–2535, 2019.
|
| [39] |
Z. Peng, N. Gu, Y. Zhang, Y. Liu, D. Wang, and L. Liu, “Path-guided time-varying formation control with collision avoidance and connectivity preservation of under-actuated autonomous surface vehicles subject to unknown input gains,” Ocean Engineering, vol. 191, p. 106501, 2019. doi: 10.1016/j.oceaneng.2019.106501
|
| [40] |
X. Ge, Q.-L. Han, J. Wang, and X.-M. Zhang, “A scalable adaptive approach to multi-vehicle formation control with obstacle avoidance,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 990–1004, 2022. doi: 10.1109/JAS.2021.1004263
|
| [41] |
R. Skjetne, Ø. N. Smogeli, and T. I. Fossen, “A nonlinear ship manoeuvering model: Identification and adaptive control with experiments for a model ship,” Modeling,Identification and Control, vol. 25, no. 1, pp. 3–27, 2004. doi: 10.4173/mic.2004.1.1
|
| [42] |
X.-J. Li and G.-H. Yang, “Neural-network-based adaptive decentralized fault-tolerant control for a class of interconnected nonlinear systems,” IEEE Trans. Neural Networks and Learning Systems, vol. 29, no. 1, pp. 144–155, 2016.
|
| [43] |
D. Wang and J. Huang, “Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form,” IEEE Trans. Neural Networks, vol. 16, no. 1, pp. 195–202, 2005. doi: 10.1109/TNN.2004.839354
|
| [44] |
X.-J. Li and G.-H. Yang, “Adaptive fault-tolerant synchronization control of a class of complex dynamical networks with general input distribution matrices and actuator faults,” IEEE Trans. Neural Networks and Learning Systems, vol. 28, no. 3, pp. 559–569, 2015.
|
| [45] |
H. Wu, “Adaptive robust tracking and model following of uncertain dynamical systems with multiple time delays,” IEEE Trans. Automatic Control, vol. 49, no. 4, pp. 611–616, 2004. doi: 10.1109/TAC.2004.825634
|
| [46] |
Z. Peng, D. Wang, and J. Wang, “Cooperative dynamic positioning of multiple marine offshore vessels: A modular design,” IEEE/ASME Trans. Mechatronics, vol. 21, no. 3, pp. 1210–1221, 2015.
|
| [47] |
R. Skjetne, T. I. Fossen, and P. V. Kokotović, “Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory,” Automatica, vol. 41, no. 2, pp. 289–298, 2005. doi: 10.1016/j.automatica.2004.10.006
|
Figures(5)






 DownLoad:
DownLoad: