A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 4
Volume 11
Issue 4
IEEE/CAA Journal of Automatica Sinica
| Citation: | C. Ma and D. Dong, “Finite-time prescribed performance time-varying formation control for second-order multi-agent systems with non-strict feedback based on a neural network observer,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 4, pp. 1039–1050, Apr. 2024. doi: 10.1109/JAS.2023.123615

|
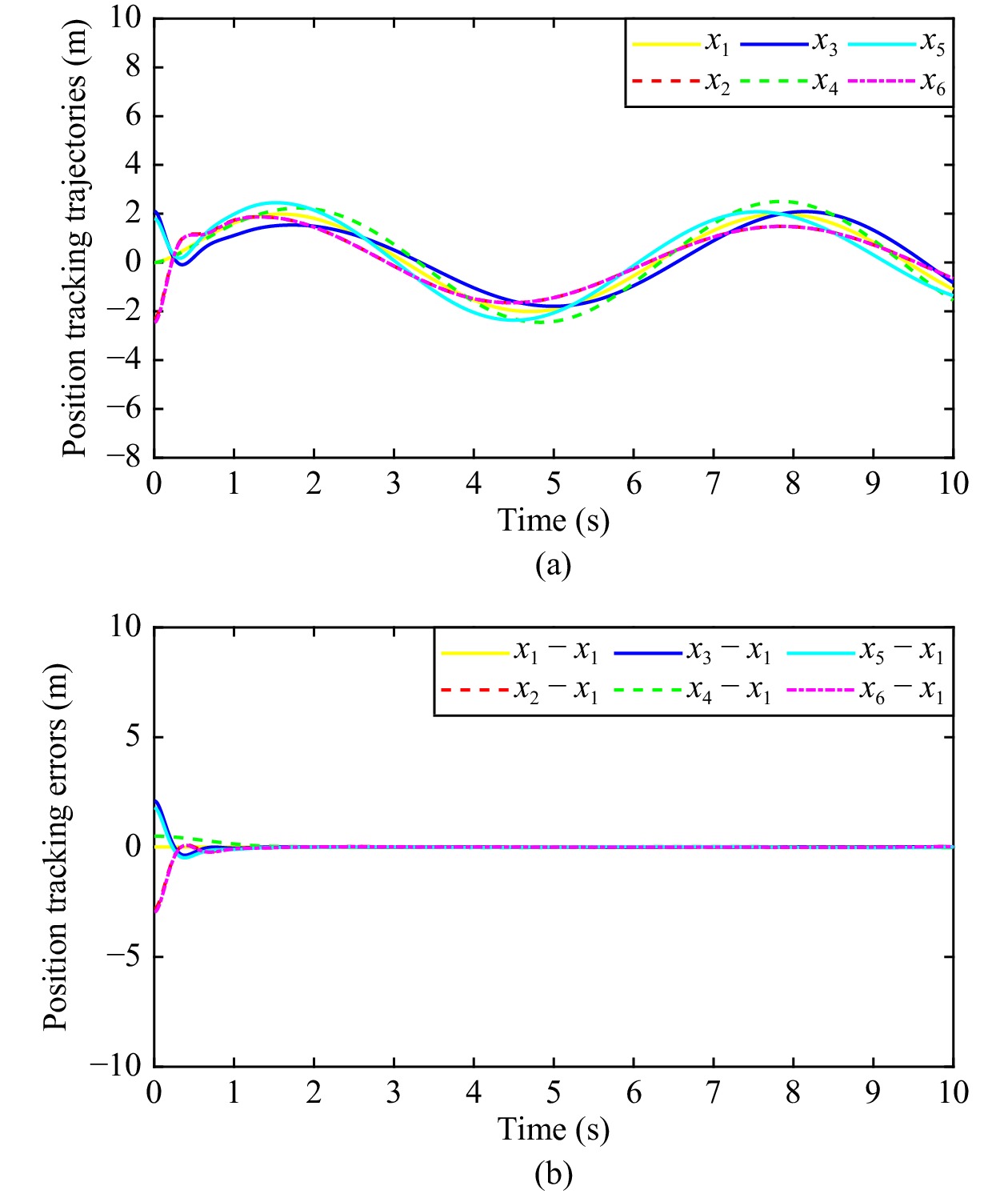
This paper studies the problem of time-varying formation control with finite-time prescribed performance for non-strict feedback second-order multi-agent systems with unmeasured states and unknown nonlinearities. To eliminate nonlinearities, neural networks are applied to approximate the inherent dynamics of the system. In addition, due to the limitations of the actual working conditions, each follower agent can only obtain the locally measurable partial state information of the leader agent. To address this problem, a neural network state observer based on the leader state information is designed. Then, a finite-time prescribed performance adaptive output feedback control strategy is proposed by restricting the sliding mode surface to a prescribed region, which ensures that the closed-loop system has practical finite-time stability and that formation errors of the multi-agent systems converge to the prescribed performance bound in finite time. Finally, a numerical simulation is provided to demonstrate the practicality and effectiveness of the developed algorithm.

| [1] |
L. Wang, K. Wang, C. Pan, W. Xu, N. Aslam, and L. Hanzo, “Multi-agent deep reinforcement learning-based trajectory planning for multi-UAV assisted mobile edge computing,” IEEE Trans. Cognitive Communications and Networking, vol. 7, no. 1, pp. 73–84, 2021. doi: 10.1109/TCCN.2020.3027695
|
| [2] |
T. Schetter, M. Campbell, and D. Surka, “Multiple agent-based autonomy for satellite constellations,” Artificial Intelligence, vol. 145, no. 1–2, pp. 147–180, Apr. 2003. doi: 10.1016/S0004-3702(02)00382-X
|
| [3] |
D. Yu, C. L. Chen, and H. Xu, “Fuzzy swarm control based on sliding-mode strategy with self-organized omnidirectional mobile robots system,” IEEE Trans. Systems,Man,and Cybernetics: Systems, pp. 1–13, 2021.
|
| [4] |
D. Yu, C. L. Chen, C.-E. Ren, and S. Sui, “Swarm control for self-organized system with fixed and switching topology,” IEEE Trans. Cybernetics, vol. 50, no. 10, pp. 4481–4494, oct. 2020. doi: 10.1109/TCYB.2019.2952913
|
| [5] |
Q. Wei, X. Wang, X. Zhong, and N. Wu, “Consensus control of leader-following multi-agent systems in directed topology with heterogeneous disturbances,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 423–431, 2021. doi: 10.1109/JAS.2021.1003838
|
| [6] |
Z. Li, L. Gao, W. Chen, and Y. Xu, “Distributed adaptive cooperative tracking of uncertain nonlinear fractional-order multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 292–300, 2020. doi: 10.1109/JAS.2019.1911858
|
| [7] |
X. Dong and G. Hu, “Time-varying formation tracking for linear multiagent systems with multiple leaders,” IEEE Trans. Automatic Control, vol. 62, no. 7, pp. 3658–3664, 2017. doi: 10.1109/TAC.2017.2673411
|
| [8] |
H. M. Guzey, H. Xu, and J. Sarangapani, “Neural network-based finite horizon optimal adaptive consensus control of mobile robot formations,” Optimal Control Applications and Methods, vol. 37, no. 5, pp. 1014–1034, Dec. 2015.
|
| [9] |
K. Aryankia and R. R. Selmic, “Neural network-based formation control with target tracking for second-order nonlinear multiagent systems,” IEEE Trans. Aerospace and Electronic Systems, vol. 58, no. 1, pp. 328–341, 2022. doi: 10.1109/TAES.2021.3111719
|
| [10] |
Y. Li, J. Zhang, and S. Tong, “Fuzzy adaptive optimized leader-following formation control for second-order stochastic multiagent systems,” IEEE Trans. Industrial Informatics, vol. 18, no. 9, pp. 6026–6037, 2022. doi: 10.1109/TII.2021.3133927
|
| [11] |
J. Qin, G. Zhang, W. X. Zheng, and Y. Kang, “Adaptive sliding mode consensus tracking for second-order nonlinear multiagent systems with actuator faults,” IEEE Trans. Cybernetics, vol. 49, no. 5, pp. 1605–1615, 2019. doi: 10.1109/TCYB.2018.2805167
|
| [12] |
H. Xu, D. Yu, S. Sui, and C. L. Chen, “An event-triggered predefined time decentralized output feedback fuzzy adaptive control method for interconnected systems,” IEEE Trans. Fuzzy Systems, pp. 1–14, 2022.
|
| [13] |
Y. Su and J. Huang, “Cooperative output regulation of linear multi-agent systems,” IEEE Trans. Automatic Control, vol. 57, no. 4, pp. 1062–1066, 2012. doi: 10.1109/TAC.2011.2169618
|
| [14] |
Y. Su and J. Huang, “Cooperative output regulation with application to multi-agent consensus under switching network,” IEEE Trans. Systems,Man,and Cybernetics,Part B (Cybernetics), vol. 42, no. 3, pp. 864–875, 2012. doi: 10.1109/TSMCB.2011.2179981
|
| [15] |
H. Cai, F. L. Lewis, G. Hu, and J. Huang, “The adaptive distributed observer approach to the cooperative output regulation of linear multi-agent systems,” Automatica, vol. 75, pp. 299–305, 2017. doi: 10.1016/j.automatica.2016.09.038
|
| [16] |
H. Zhang, J. Chen, Z. Wang, C. Fu, and S. Song, “Distributed event-triggered control for cooperative output regulation of multiagent systems with an online estimation algorithm,” IEEE Trans. Cybernetics, vol. 52, no. 3, pp. 1911–1923, 2022. doi: 10.1109/TCYB.2020.2991761
|
| [17] |
Y. Zhang, J. Sun, H. Liang, and H. Li, “Event-triggered adaptive tracking control for multiagent systems with unknown disturbances,” IEEE Trans. Cybernetics, vol. 50, no. 3, pp. 890–901, 2020. doi: 10.1109/TCYB.2018.2869084
|
| [18] |
H. Liang, X. Guo, Y. Pan, and T. Huang, “Event-triggered fuzzy bipartite tracking control for network systems based on distributed reduced-order observers,” IEEE Trans. Fuzzy Systems, vol. 29, no. 6, pp. 1601–1614, 2021. doi: 10.1109/TFUZZ.2020.2982618
|
| [19] |
J. Lan, Y.-J. Liu, D. Yu, G. Wen, S. Tong, and L. Liu, “Time-varying optimal formation control for second-order multiagent systems based on neural network observer and reinforcement learning,” IEEE Trans. Neural Networks and Learning Systems, pp. 1–12, 2022. DOI: 10.1109/TNNLS.2022.3158085
|
| [20] |
B. Kaviarasan, O.-M. Kwon, M. J. Park, and R. Sakthivel, “Stochastic faulty estimator-based non-fragile tracking controller for multi-agent systems with communication delay,” Applied Mathematics and Computation, vol. 392, p. 125704, 2021. doi: 10.1016/j.amc.2020.125704
|
| [21] |
S. Yu and X. Long, “Finite-time consensus for second-order multi-agent systems with disturbances by integral sliding mode,” Automatica, vol. 54, pp. 158–165, 2015. doi: 10.1016/j.automatica.2015.02.001
|
| [22] |
Y. Zhao, Z. Duan, G. Wen, and Y. Zhang, “Distributed finite-time tracking control for multi-agent systems: An observer-based approach,” Systems &Control Letters, vol. 62, no. 1, pp. 22–28, 2013.
|
| [23] |
R. R. Nair, L. Behera, and S. Kumar, “Event-triggered finite-time integral sliding mode controller for consensus-based formation of multirobot systems with disturbances,” IEEE Trans. Control Systems Technology, vol. 27, no. 1, pp. 39–47, 2019. doi: 10.1109/TCST.2017.2757448
|
| [24] |
C. P. Bechlioulis and G. A. Rovithakis, “Prescribed performance adaptive control of siso feedback linearizable systems with disturbances,” in Proc. 16th Mediterranean Conf. Control and Automation, 2008, pp. 1035–1040.
|
| [25] |
S. He, M. Wang, S.-L. Dai, and F. Luo, “Leader-follower formation control of usvs with prescribed performance and collision avoidance,” IEEE Trans. Industrial Informatics, vol. 15, no. 1, pp. 572–581, 2019. doi: 10.1109/TII.2018.2839739
|
| [26] |
F. Mehdifar, C. Bechlioulis, F. Hashemzadeh, and M. Baradarannia, “Prescribed performance distance-based formation control of multi-agent systems,” Automatica, vol. 119, p. 109086, 2020. doi: 10.1016/j.automatica.2020.109086
|
| [27] |
Y. Yang, X. Si, D. Yue, and Y.-C. Tian, “Time-varying formation tracking with prescribed performance for uncertain nonaffine nonlinear multiagent systems,” IEEE Trans. Automation Science and Engineering, vol. 18, no. 4, pp. 1778–1789, 2021. doi: 10.1109/TASE.2020.3019346
|
| [28] |
F. Chen and D. V. Dimarogonas, “Second order consensus for leader-follower multi-agent systems with prescribed performance,” IFAC-PapersOnLine, vol. 52, no. 20, pp. 103–108, 2019. doi: 10.1016/j.ifacol.2019.12.136
|
| [29] |
Y. Liu, X. Liu, and Y. Jing, “Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance,” Information Sciences, vol. 468, pp. 29–46, 2018. doi: 10.1016/j.ins.2018.08.029
|
| [30] |
S. Sui, C. L. Chen, and S. Tong, “A novel adaptive NN prescribed performance control for stochastic nonlinear systems,” IEEE Trans. Neural Networks and Learning Systems, vol. 32, no. 7, pp. 3196–3205, jul. 2021. doi: 10.1109/TNNLS.2020.3010333
|
| [31] |
H. Wang, W. Bai, X. Zhao, and X. Liu, “Finite-time-prescribed performance-based adaptive fuzzy control for strict-feedback nonlinear systems with dynamic uncertainty and actuator faults,” IEEE Trans. Cybernetics, vol. 52, no. 7, pp. 6959–6971, 2022. doi: 10.1109/TCYB.2020.3046316
|
| [32] |
G. Cui, J. Yu, and Shi, “Observer-based finite-time adaptive fuzzy control with prescribed performance for nonstrict-feedback nonlinear systems,” IEEE Trans. Fuzzy Systems, vol. 30, no. 3, pp. 767–778, 2022. doi: 10.1109/TFUZZ.2020.3048518
|
| [33] |
J. Qiu, T. Wang, K. Sun, I. J. Rudas, and H. Gao, “Disturbance observer-based adaptive fuzzy control for strict-feedback nonlinear systems with finite-time prescribed performance,” IEEE Trans. Fuzzy Systems, vol. 30, no. 4, pp. 1175–1184, 2022. doi: 10.1109/TFUZZ.2021.3053327
|
| [34] |
W. Wu, Y. Zhang, W. Zhang, and W. Xie, “Distributed finite-time performance-prescribed time-varying formation control of autonomous surface vehicles with saturated inputs,” Ocean Engineering, vol. 266, p. 112866, dec. 2022. doi: 10.1016/j.oceaneng.2022.112866
|
| [35] |
M. Wang, B. Chen, and C. Lin, “Prescribed finite-time adaptive neural trajectory tracking control of quadrotor via output feedback,” Neurocomputing, vol. 458, pp. 364–375, 2021. doi: 10.1016/j.neucom.2021.06.018
|
| [36] |
X. Li, X. Luo, J. Wang, and X. Guan, “Finite-time consensus of nonlinear multi-agent system with prescribed performance,” Nonlinear Dynamics, vol. 91, no. 4, pp. 2397–2409, 2018. doi: 10.1007/s11071-017-4020-1
|
| [37] |
S. I. Han, “Prescribed consensus and formation error constrained finite-time sliding mode control for multi-agent mobile robot systems,” IET Control Theory &Applications, vol. 12, no. 2, pp. 282–290, 2018.
|
| [38] |
H. Zhou, S. Sui, and S. Tong, “Finite-time adaptive fuzzy prescribed performance formation control for high-order nonlinear multi-agent systems based on event-triggered mechanism,” IEEE Trans. Fuzzy Systems, vol. 31, no. 4, pp. 1229–1239, 2023.
|
| [39] |
P. H. Du, Y. Pan, H. Li, and H.-K. Lam, “Nonsingular finite-time event-triggered fuzzy control for large-scale nonlinear systems,” IEEE Trans. Fuzzy Systems, vol. 29, no. 8, pp. 2088–2099, 2021. doi: 10.1109/TFUZZ.2020.2992632
|
| [40] |
S. Sui, H. Xu, S. Tong, and C. Chen, “A novel prescribed performance fuzzy adaptive output feedback control for nonlinear mimo systems in finite-time,” IEEE Trans. Fuzzy Systems, 2021.
|
| [41] |
Y. Sun, B. Chen, C. Lin, and H. Wang, “Finite-time adaptive control for a class of nonlinear systems with nonstrict feedback structure,” IEEE Trans. Cybernetics, vol. 48, no. 10, pp. 2774–2782, 2018. doi: 10.1109/TCYB.2017.2749511
|
| [42] |
F. Wang, B. Chen, C. Lin, J. Zhang, and X. Meng, “Adaptive neural network finite-time output feedback control of quantized nonlinear systems,” IEEE Trans. Cybernetics, vol. 48, no. 6, pp. 1839–1848, Jun. 2018. doi: 10.1109/TCYB.2017.2715980
|
| [43] |
J. Wu, W. Chen, and J. Li, “Global finite-time adaptive stabilization for nonlinear systems with multiple unknown control directions,” Automatica, vol. 69, pp. 298–307, 2016. doi: 10.1016/j.automatica.2016.03.005
|
| [44] |
H. Xu, D. Yu, S. Sui, Y.-P. Zhao, C. L. Chen, and Z. Wang, “Nonsingular practical fixed-time adaptive output feedback control of MIMO nonlinear systems,” IEEE Trans. Neural Networks and Learning Systems, pp. 1–13, 2022. DOI: 10.1109/TNNLS.2021.3139230
|
Figures(13)






 DownLoad:
DownLoad: