A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 2
Volume 11
Issue 2
IEEE/CAA Journal of Automatica Sinica
| Citation: | Y. Hu, C. Zhang, B. Wang, J. Zhao, X. Gong, J. Gao, and H. Chen, “Noise-tolerant ZNN-Based data-driven iterative learning control for discrete nonaffine nonlinear MIMO repetitive systems,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 344–361, Feb. 2024. doi: 10.1109/JAS.2023.123603

|
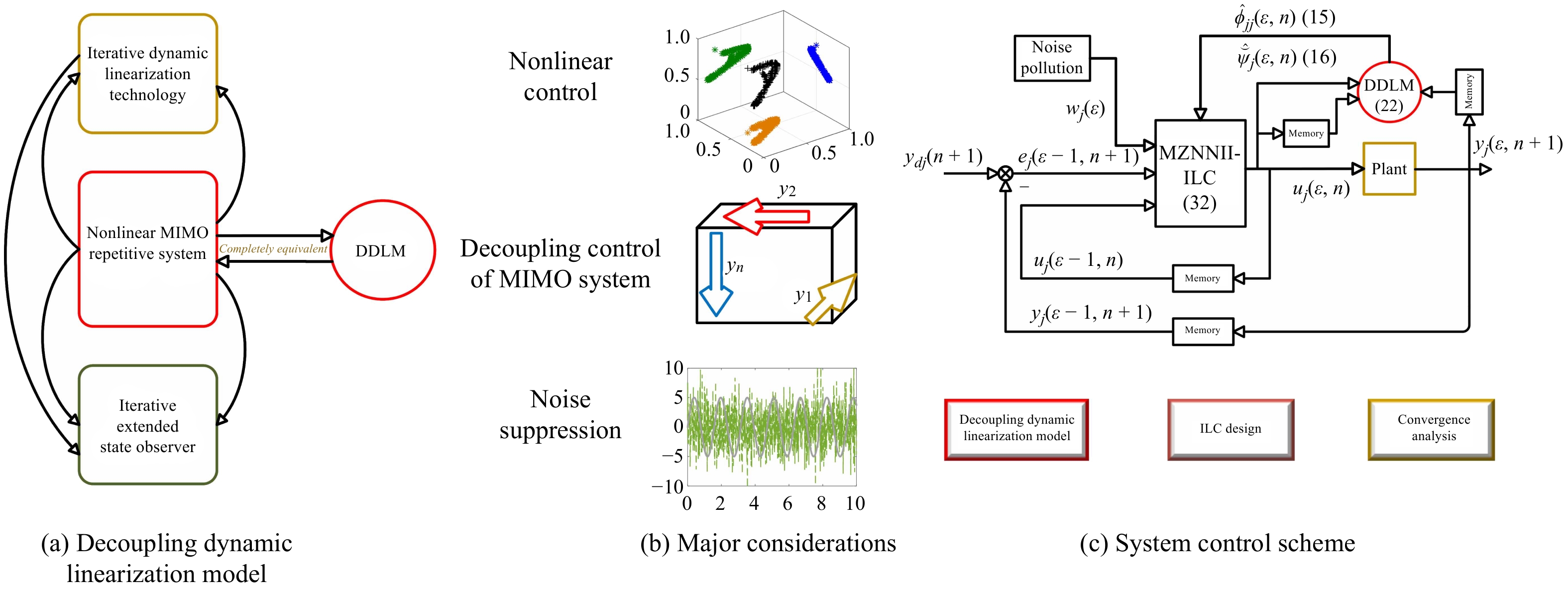
Aiming at the tracking problem of a class of discrete nonaffine nonlinear multi-input multi-output (MIMO) repetitive systems subjected to separable and nonseparable disturbances, a novel data-driven iterative learning control (ILC) scheme based on the zeroing neural networks (ZNNs) is proposed. First, the equivalent dynamic linearization data model is obtained by means of dynamic linearization technology, which exists theoretically in the iteration domain. Then, the iterative extended state observer (IESO) is developed to estimate the disturbance and the coupling between systems, and the decoupled dynamic linearization model is obtained for the purpose of controller synthesis. To solve the zero-seeking tracking problem with inherent tolerance of noise, an ILC based on noise-tolerant modified ZNN is proposed. The strict assumptions imposed on the initialization conditions of each iteration in the existing ILC methods can be absolutely removed with our method. In addition, theoretical analysis indicates that the modified ZNN can converge to the exact solution of the zero-seeking tracking problem. Finally, a generalized example and an application-oriented example are presented to verify the effectiveness and superiority of the proposed process.

| [1] |
C. Hu, R. Zhou, Z. Wang, Y. Zhu, and M. Tomizuka, “Real-time iterative compensation framework for precision mechatronic motion control systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 7, pp. 1218–1232, Jul. 2022. doi: 10.1109/JAS.2022.105689
|
| [2] |
S. R. Nekoo, J. Á. Acosta, G. Heredia, and A. Ollero, “A PD-type state-dependent Riccati equation with iterative learning augmentation for mechanical systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1499–1511, Aug. 2022. doi: 10.1109/JAS.2022.105533
|
| [3] |
D. Huang, C. Chen, T. Huang, D. Zhao, and Q. Tang, “An active repetitive learning control method for lateral suspension systems of high-speed trains,” IEEE Trans. Neural Netw. Learn. Syst., vol. 31, no. 10, pp. 4094–4103, Oct. 2020. doi: 10.1109/TNNLS.2019.2952175
|
| [4] |
Y. Yu, C. Zhang, W. Cao, X. Huang, X. Zhang, and M. Zhou, “Neural network based iterative learning control for magnetic shape memory alloy actuator with iteration-dependent uncertainties,” Mech. Syst. Signal Process., vol. 187, p. 109950, Mar. 2023. doi: 10.1016/j.ymssp.2022.109950
|
| [5] |
D. Meng and J. Zhang, “Robust optimization-based iterative learning control for nonlinear systems with nonrepetitive uncertainties,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 1001–1014, May 2021. doi: 10.1109/JAS.2021.1003973
|
| [6] |
R. Chi, H. Li, N. Lin, and B. Huang, “Data-driven indirect iterative learning control,” IEEE Trans. Cybern., 2023. DOI: 10.1109/TCYB.2022.3232136
|
| [7] |
Q. Wei, L. Zhu, R. Song, P. Zhang, D. Liu, and J. Xiao, “Model-free adaptive optimal control for unknown nonlinear multiplayer nonzero-sum game,” IEEE Trans. Neural Netw. Learn. Syst., vol. 33, no. 2, pp. 879–892, Feb. 2022. doi: 10.1109/TNNLS.2020.3030127
|
| [8] |
Q. Wei, T. Li, and D. Liu, “Learning control for air conditioning systems via human expressions,” IEEE Trans. Ind. Electron., vol. 68, no. 8, pp. 7662–7671, Aug. 2021. doi: 10.1109/TIE.2020.3001849
|
| [9] |
B. Zhao, D. Liu, and C. Luo, “Reinforcement learning-based optimal stabilization for unknown nonlinear systems subject to inputs with uncertain constraints,” IEEE Trans. Neural Netw. Learn. Syst., vol. 31, no. 10, pp. 4330–4340, Oct. 2020. doi: 10.1109/TNNLS.2019.2954983
|
| [10] |
J.-X. Xu and Y. Tan, Linear and Nonlinear Iterative Learning Control. Berlin, Germany: Springer, 2003.
|
| [11] |
D. Meng and K. L. Moore, “Contraction mapping-based robust convergence of iterative learning control with uncertain, locally Lipschitz nonlinearity,” IEEE Trans. Syst. Man Cybern. Syst., vol. 50, no. 2, pp. 442–454, Feb. 2020. doi: 10.1109/TSMC.2017.2780131
|
| [12] |
A. Tayebi and C.-J. Chien, “A unified adaptive iterative learning control framework for uncertain nonlinear systems,” IEEE Trans. Automat. Control, vol. 52, no. 10, pp. 1907–1913, Oct. 2007. doi: 10.1109/TAC.2007.906215
|
| [13] |
W. He, T. Meng, D. Huang, and X. Li, “Adaptive boundary iterative learning control for an Euler-Bernoulli beam system with input constraint,” IEEE Trans. Neural Netw. Learn. Syst., vol. 29, no. 5, pp. 1539–1549, May 2018. doi: 10.1109/TNNLS.2017.2673865
|
| [14] |
P. Janssens, G. Pipeleers, and J. Swevers, “A data-driven constrained norm-optimal iterative learning control framework for LTI systems,” IEEE Trans. Control Syst. Technol., vol. 21, no. 2, pp. 546–551, Mar. 2013. doi: 10.1109/TCST.2012.2185699
|
| [15] |
H. Sun and A. G. Alleyne, “A computationally efficient norm optimal iterative learning control approach for LTV systems,” Automatica, vol. 50, no. 1, pp. 141–148, Jan. 2014. doi: 10.1016/j.automatica.2013.09.009
|
| [16] |
X. Yu, Z. Hou, and M. M. Polycarpou, “Controller-dynamic-linearization-based data-driven ILC for nonlinear discrete-time systems with RBFNN,” IEEE Trans. Syst. Man Cybern. Syst., vol. 52, no. 8, pp. 4981–4992, Aug. 2022. doi: 10.1109/TSMC.2021.3110790
|
| [17] |
X. Yu, Z. Hou, M. M. Polycarpou, and L. Duan, “Data-driven iterative learning control for nonlinear discrete-time MIMO systems,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 3, pp. 1136–1148, Mar. 2021. doi: 10.1109/TNNLS.2020.2980588
|
| [18] |
Q. Wei and D. Liu, “Data-driven neuro-optimal temperature control of water-gas shift reaction using stable iterative adaptive dynamic programming,” IEEE Trans. Ind. Electron., vol. 61, no. 11, pp. 6399–6408, Nov. 2014. doi: 10.1109/TIE.2014.2301770
|
| [19] |
H. Lin, B. Zhao, D. Liu, and C. Alippi, “Data-based fault tolerant control for affine nonlinear systems through particle swarm optimized neural networks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 954–964, Jul. 2020. doi: 10.1109/JAS.2020.1003225
|
| [20] |
Y. Yu, C. Zhang, Y. Wang, and M. Zhou, “Neural-network-based iterative learning control for hysteresis in a magnetic shape memory alloy actuator,” IEEE/ASME Trans. Mechatron., vol. 27, no. 2, pp. 928–939, Apr. 2022. doi: 10.1109/TMECH.2021.3075057
|
| [21] |
K. Patan and M. Patan, “Neural-network-based iterative learning control of nonlinear systems,” ISA Trans., vol. 98, pp. 445–453, Mar. 2020. doi: 10.1016/j.isatra.2019.08.044
|
| [22] |
J. Wei, Y. Zhang, and H. Bao, “An exploration on adaptive iterative learning control for a class of commensurate high-order uncertain nonlinear fractional order systems,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 618–627, Mar. 2018. doi: 10.1109/JAS.2017.7510361
|
| [23] |
J. Zhang, B. Cui, X. Dai, and Z. Jiang, “Iterative learning control for distributed parameter systems based on non-collocated sensors and actuators,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 3, pp. 865–871, May 2020. doi: 10.1109/JAS.2019.1911663
|
| [24] |
D. Shen and Y. Xu, “Iterative learning control for discrete-time stochastic systems with quantized information,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 1, pp. 59–67, Jan. 2016. doi: 10.1109/JAS.2016.7373763
|
| [25] |
B. Esmaeili, S. S. Madani, M. Salim, M. Baradarannia, and S. Khanmohammadi, “Model-free adaptive iterative learning integral terminal sliding mode control of exoskeleton robots,” J. Vib. Control, vol. 28, no. 21-22, pp. 3120–3139, Nov. 2022. doi: 10.1177/10775463211026031
|
| [26] |
Q. Yu, Z. Hou, X. Bu, and Q. Yu, “RBFNN-based data-driven predictive iterative learning control for nonaffine nonlinear systems,” IEEE Trans. Neural Netw. Learn. Syst., vol. 31, no. 4, pp. 1170–1182, Apr. 2020. doi: 10.1109/TNNLS.2019.2919441
|
| [27] |
Z. Hou, “The parameter identification, adaptive control and model free learning adaptive control for nonlinear system,” Ph.D. dissertation, Northeastern Univ., Shenyang, China, 1994.
|
| [28] |
C. Wang, X. Huo, K. Ma, and R. Ji, “PID-like model free adaptive control with discrete extended state observer and its application on an unmanned helicopter,” IEEE Trans. Industr. Inform., vol. 19, no. 11, pp. 11265–11274, Nov. 2023. doi: 10.1109/TII.2023.3245223
|
| [29] |
X.-Z. Jin, Y.-S. Ma, and W.-W. Che, “An improved model-free adaptive control for nonlinear systems: An LMI approach,” Appl. Math. Comput., vol. 447, p. 127910, Jun. 2023.
|
| [30] |
R. Chi, B. Huang, Z. Hou, and S. Jin, “Data-driven high-order terminal iterative learning control with a faster convergence speed,” Int. J. Robust Nonlinear Control, vol. 28, no. 1, pp. 103–119, Jan. 2018. doi: 10.1002/rnc.3861
|
| [31] |
Z. Z. Pan, R. Chi, and Z. Hou, “Compensation-based distributed model-free adaptive control for cyber-attacks,” IEEE Trans. Signal Inf. Process. Netw., vol. 9, pp. 84–94, Feb. 2023.
|
| [32] |
X.-Y. Li, “Iterative extended state observer and its application in iterative learning control,” Control Decis., vol. 30, no. 3, pp. 473–478, Mar. 2015.
|
| [33] |
B. Liao, L. Han, X. Cao, S. Li, and J. Li, “Double integral-enhanced Zeroing neural network with linear noise rejection for time-varying matrix inverse,” CAAI Trans. Intell. Technol., 2023. DOI: 10.1049/cit2.12161
|
| [34] |
Y. Zhang and S. S. Ge, “Design and analysis of a general recurrent neural network model for time-varying matrix inversion,” IEEE Trans. Neural Netw., vol. 16, no. 6, pp. 1477–1490, Nov. 2005. doi: 10.1109/TNN.2005.857946
|
| [35] |
Z. Sun, G. Wang, L. Jin, C. Cheng, B. Zhang, and J. Yu, “Noise-suppressing zeroing neural network for online solving time-varying matrix square roots problems: A control-theoretic approach,” Expert Syst. Appl., vol. 192, p. 116272, Apr. 2022. doi: 10.1016/j.eswa.2021.116272
|
| [36] |
L. Jia, L. Xiao, J. Dai, Z. Qi, Z. Zhang, and Y. Zhang, “Design and application of an adaptive fuzzy control strategy to zeroing neural network for solving time-variant QP problem,” IEEE Trans. Fuzzy Syst., vol. 29, no. 6, pp. 1544–1555, Jun. 2021. doi: 10.1109/TFUZZ.2020.2981001
|
| [37] |
L. Jin, S. Li, B. Hu, M. Liu, and J. Yu, “A noise-suppressing neural algorithm for solving the time-varying system of linear equations: A control-based approach,” IEEE Trans. Industr. Inform., vol. 15, no. 1, pp. 236–246, Jan. 2019. doi: 10.1109/TII.2018.2798642
|
| [38] |
Z. Sun, F. Li, B. Zhang, Y. Sun, and L. Jin, “Different modified zeroing neural dynamics with inherent tolerance to noises for time-varying reciprocal problems: A control-theoretic approach,” Neurocomputing, vol. 337, pp. 165–179, Apr. 2019. doi: 10.1016/j.neucom.2019.01.064
|
| [39] |
Z. Hu, L. Xiao, J. Dai, Y. Xu, Q. Zuo, and C. Liu, “A unified predefined-time convergent and robust ZNN model for constrained quadratic programming,” IEEE Trans. Industr. Inform., vol. 17, no. 3, pp. 1998–2010, Mar. 2021. doi: 10.1109/TII.2020.2996215
|
| [40] |
P. Du, X. Peng, Z. Li, L. Li, and W. Zhong, “Performance-guaranteed adaptive self-healing control for wastewater treatment processes,” J. Process Control, vol. 116, pp. 147–158, Aug. 2022. doi: 10.1016/j.jprocont.2022.06.004
|
| [41] |
S. Zhao, Q. Yang, P. Cheng, R. Deng, and J. Xia, “Adaptive resilient control for variable-speed wind turbines against false data injection attacks,” IEEE Trans. Sustain. Energy, vol. 13, no. 2, pp. 971–985, Apr. 2022. doi: 10.1109/TSTE.2022.3141766
|
| [42] |
Z. Hou and S. Jin, Model Free Adaptive Control: Theory and Applications. Boca Raton: CRC Press, 2013.
|
| [43] |
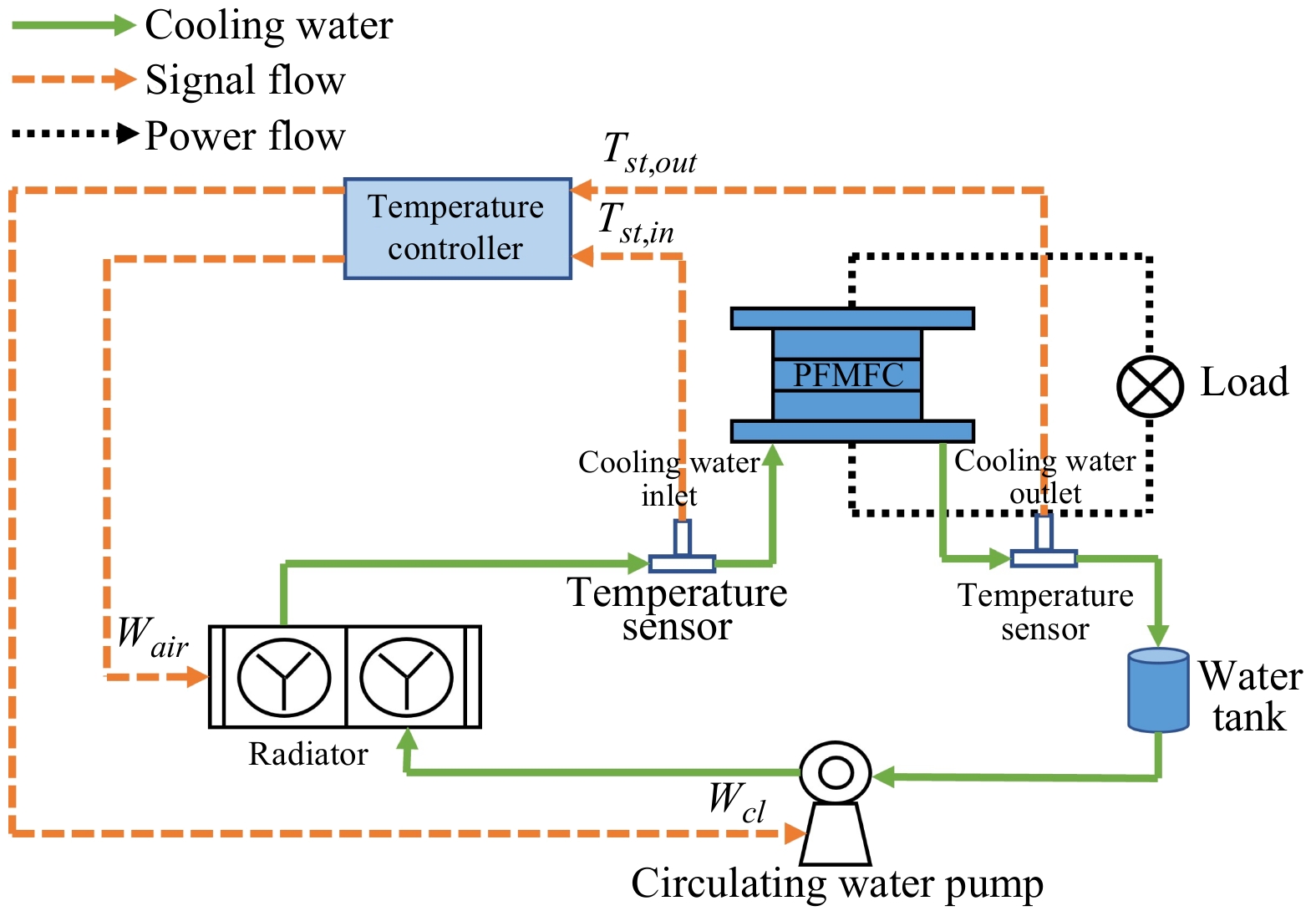
X. Zhao, Y. Li, Z. Liu, Q. Li, and W. Chen, “Thermal management system modeling of a water-cooled proton exchange membrane fuel cell,” Int. J. Hydrogen Energy, vol. 40, no. 7, pp. 3048–3056, Feb. 2015. doi: 10.1016/j.ijhydene.2014.12.026
|
Figures(12) / Tables(5)






 DownLoad:
DownLoad: