A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 3
Volume 11
Issue 3
IEEE/CAA Journal of Automatica Sinica
| Citation: | M. Li, Y. Long, T. Li, H. Liang, and C. Chen, “Dynamic event-triggered consensus control for input constrained multi-agent systems with a designable minimum inter-event time,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 3, pp. 649–660, Mar. 2024. doi: 10.1109/JAS.2023.123582

|
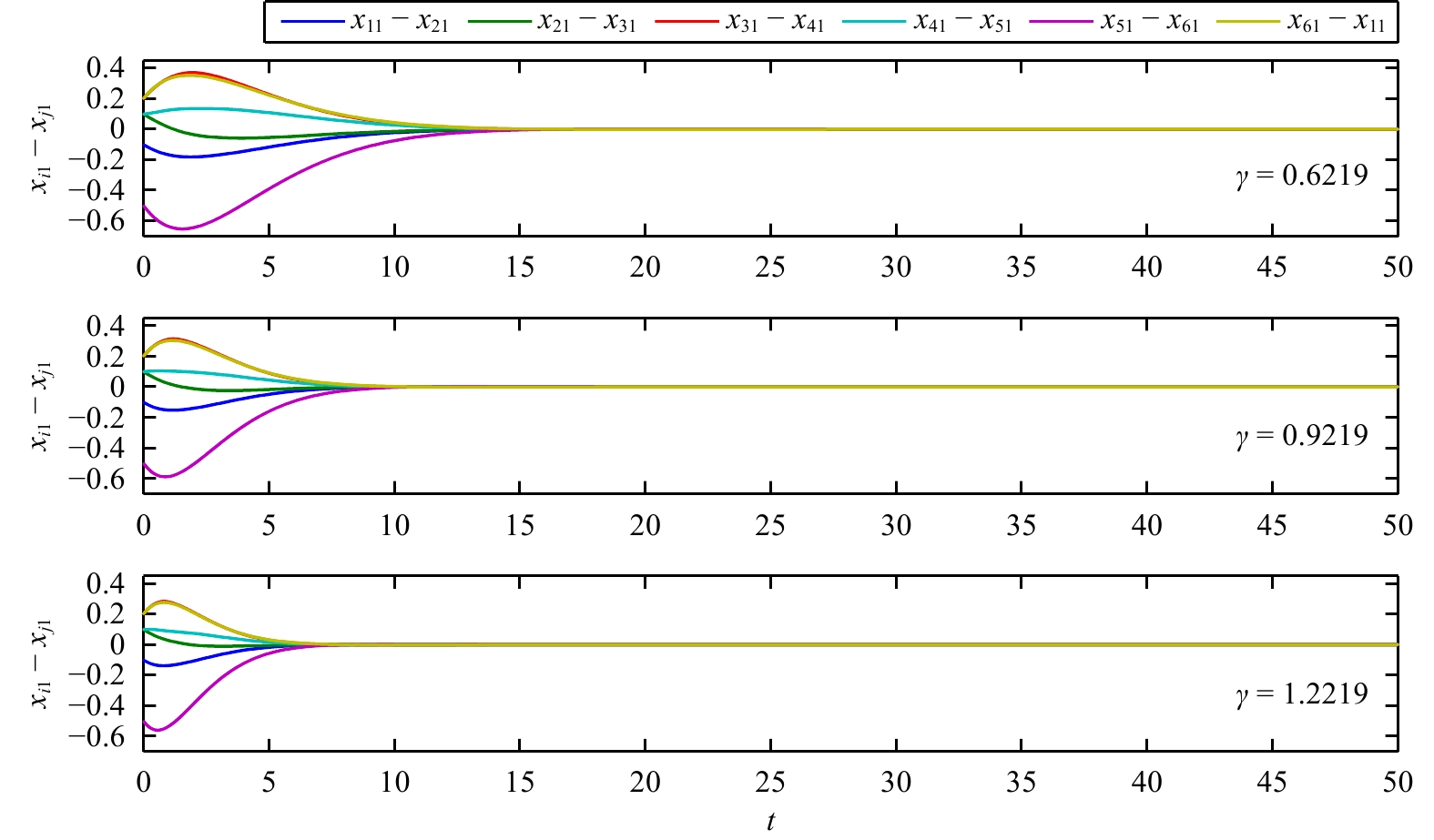
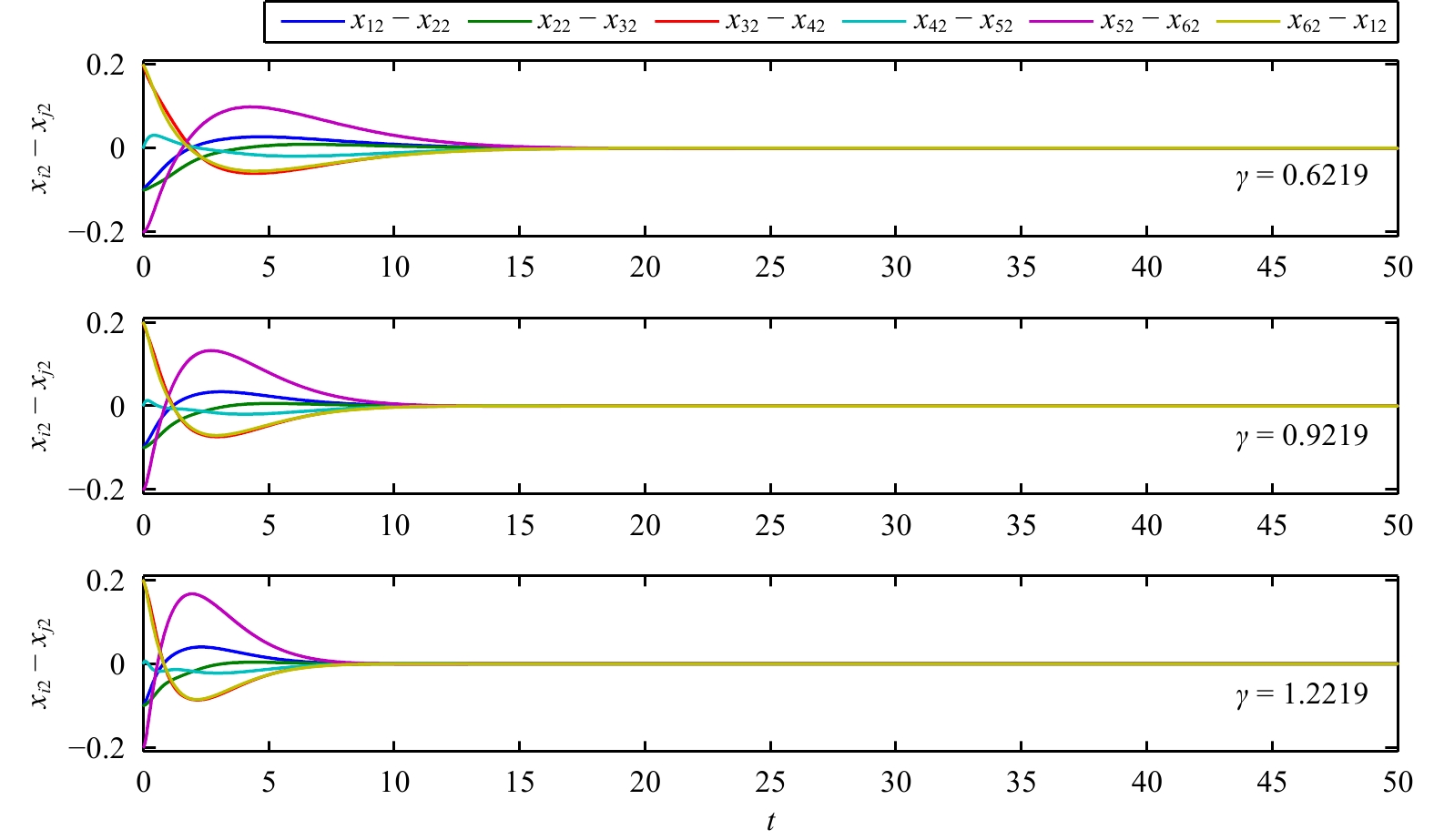
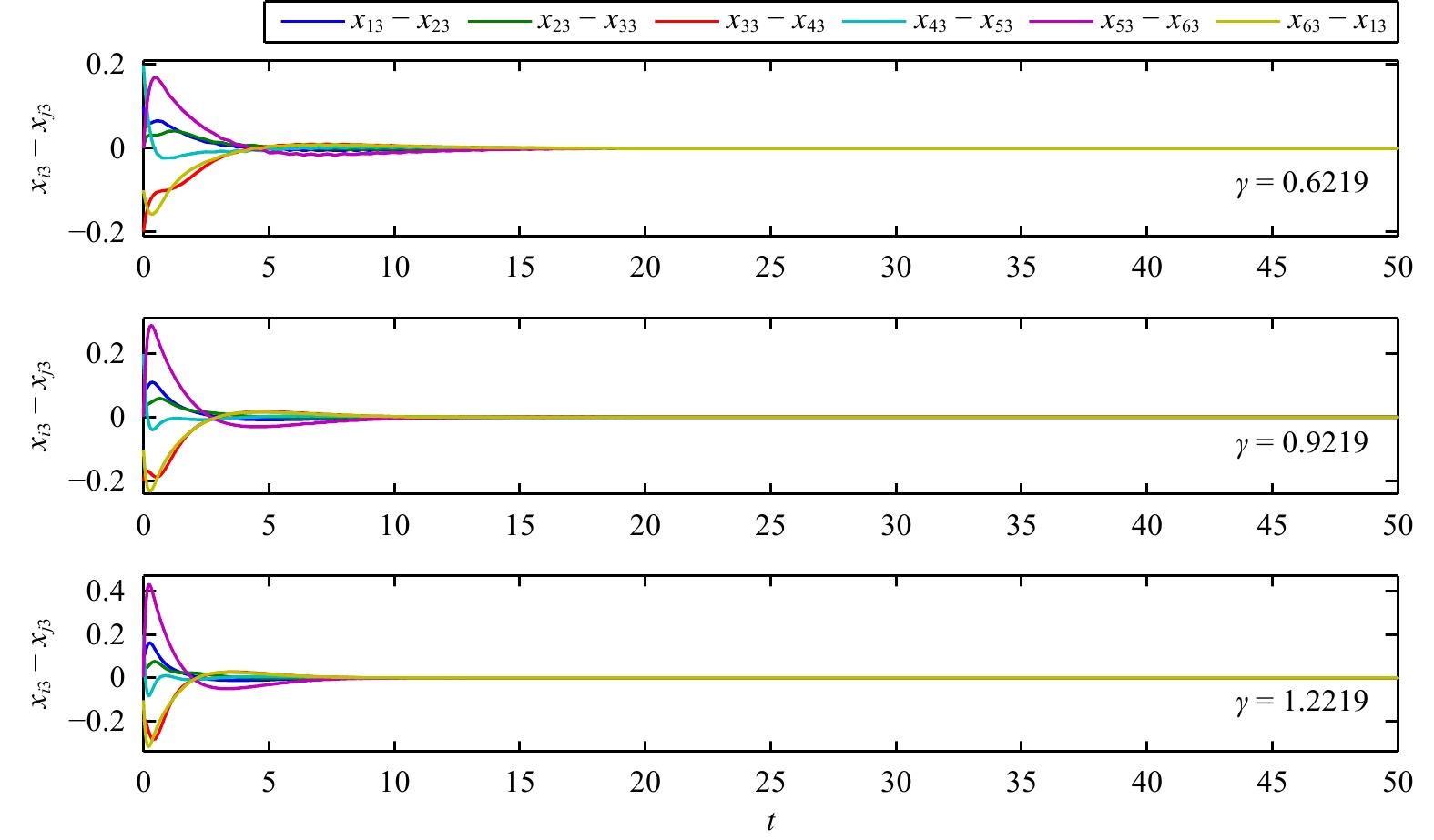
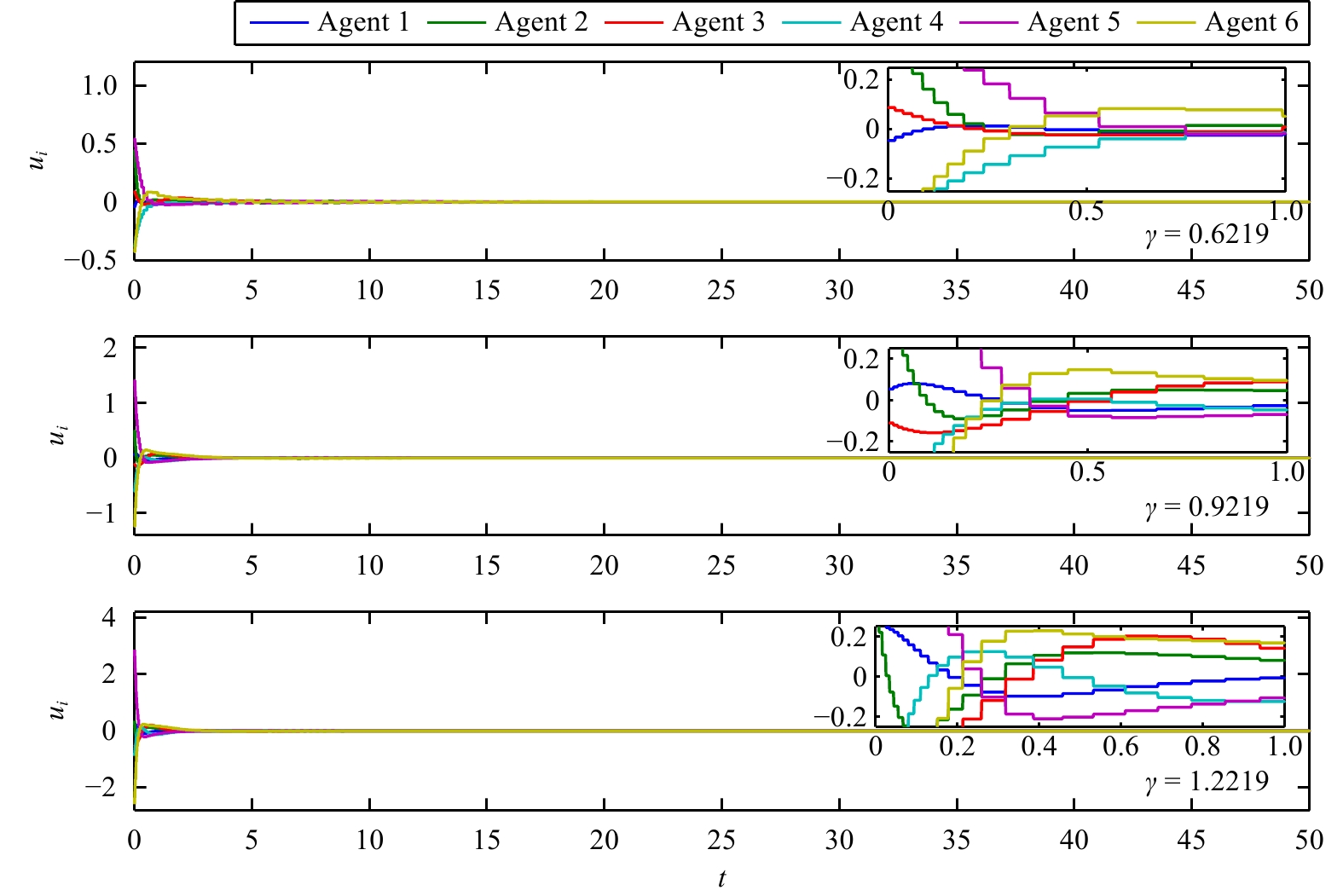
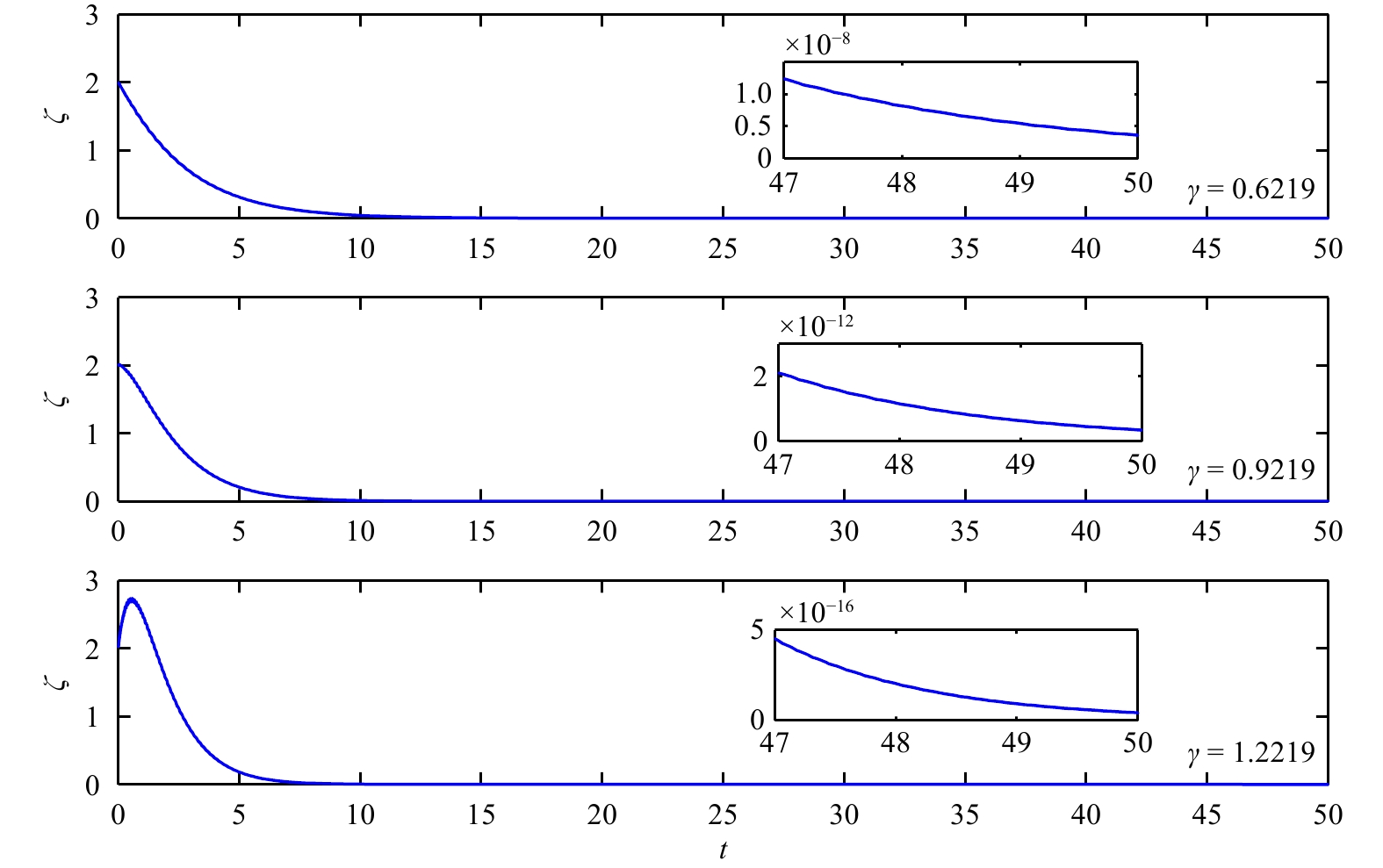
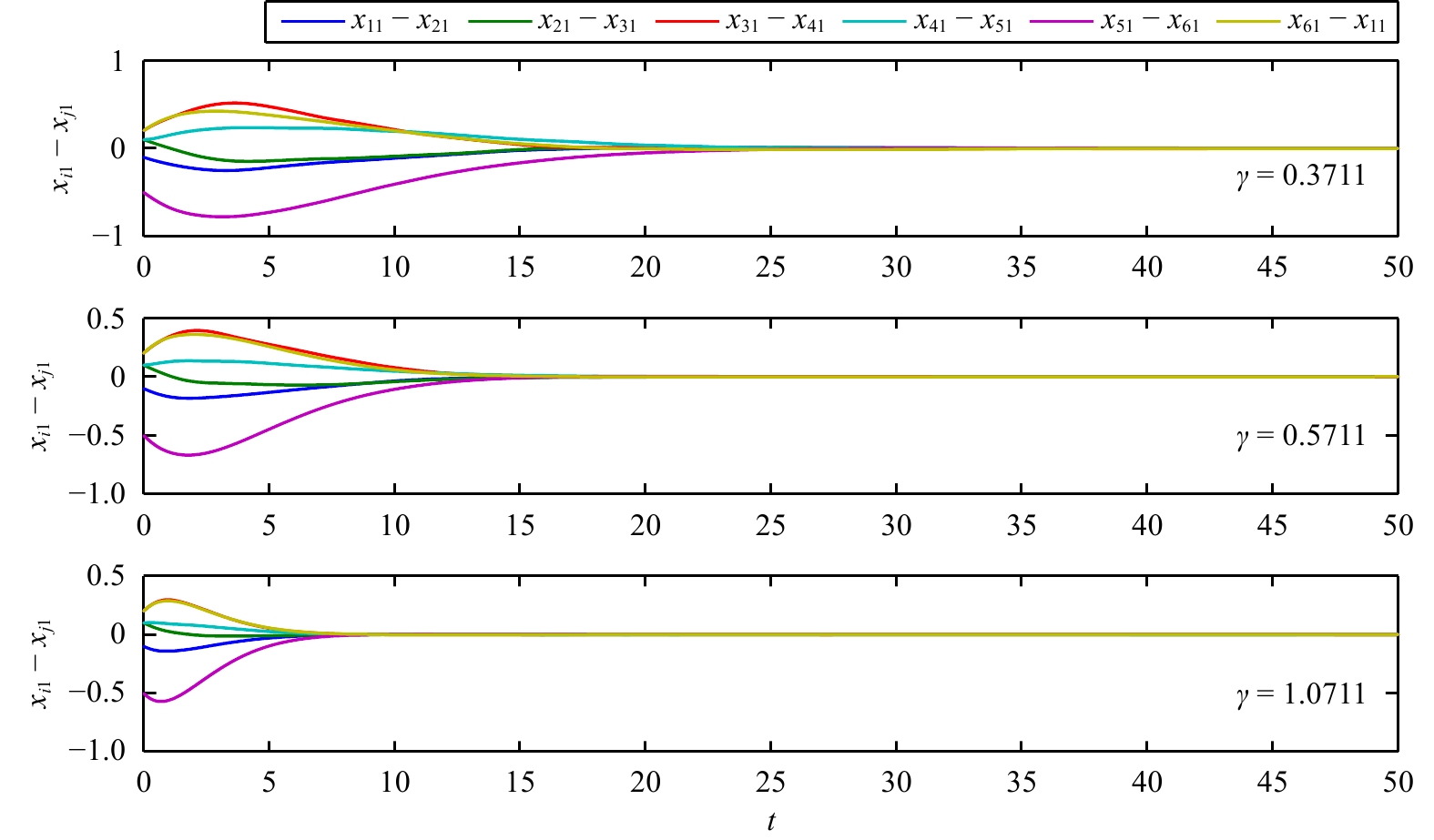
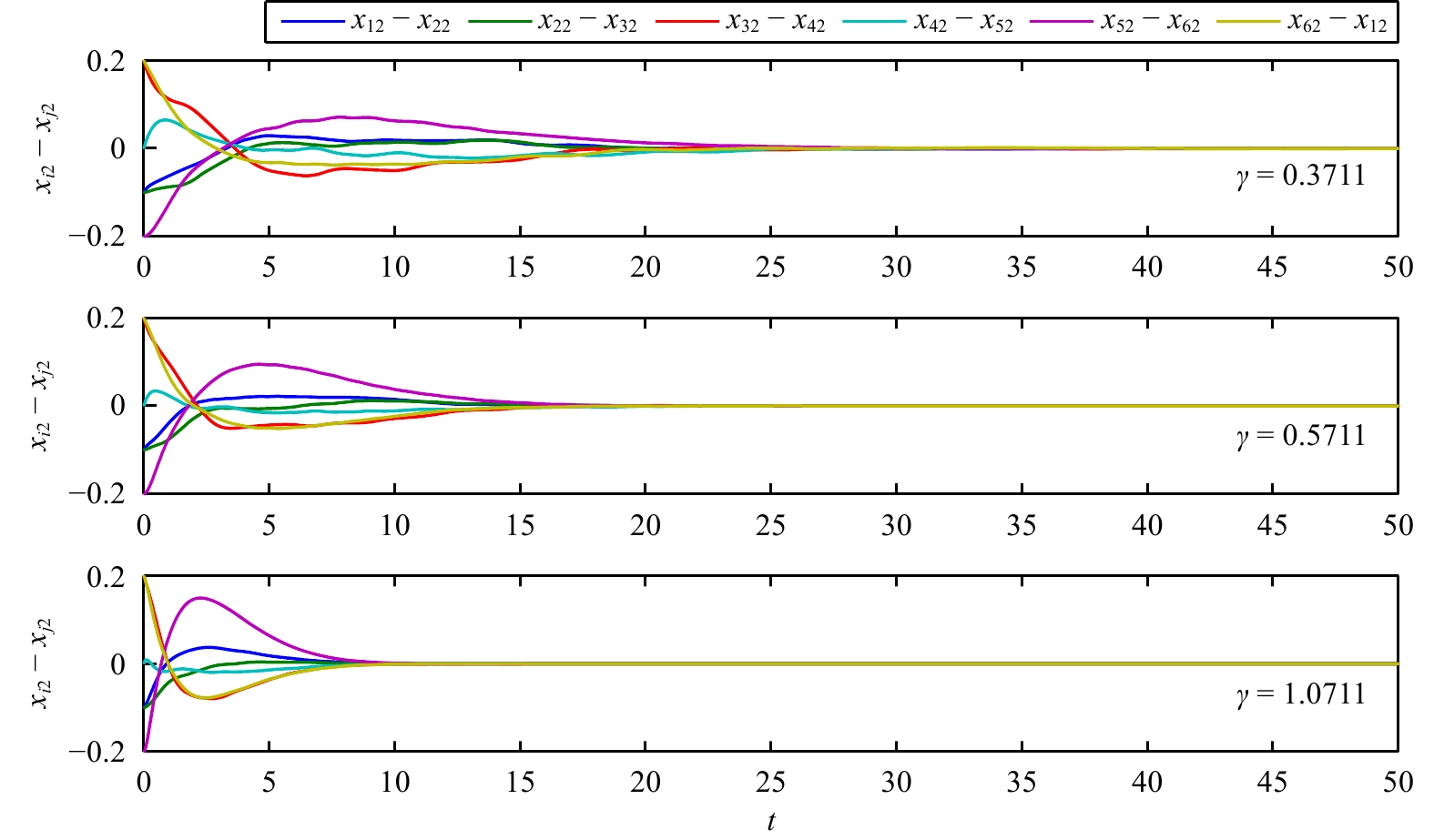
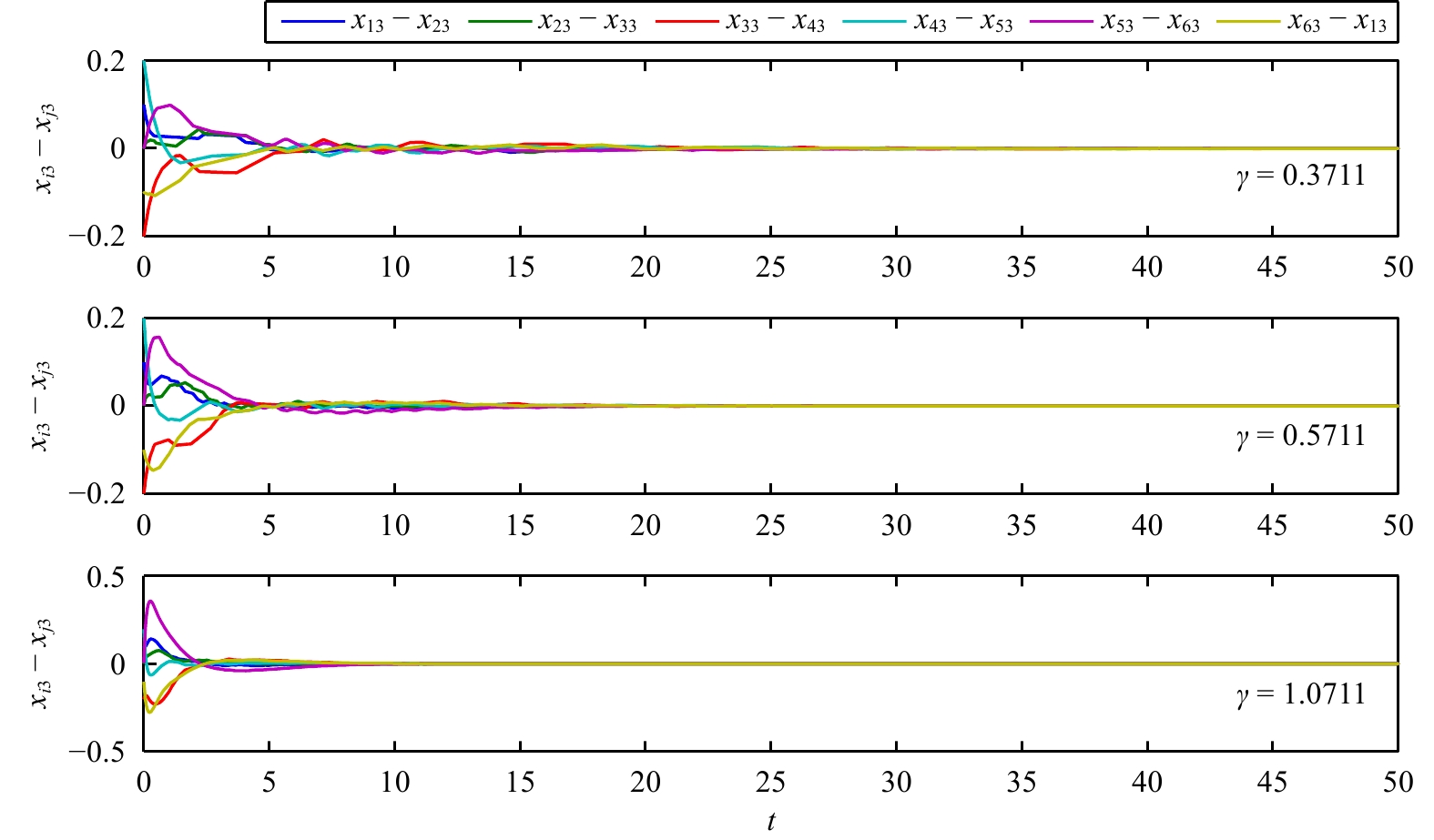
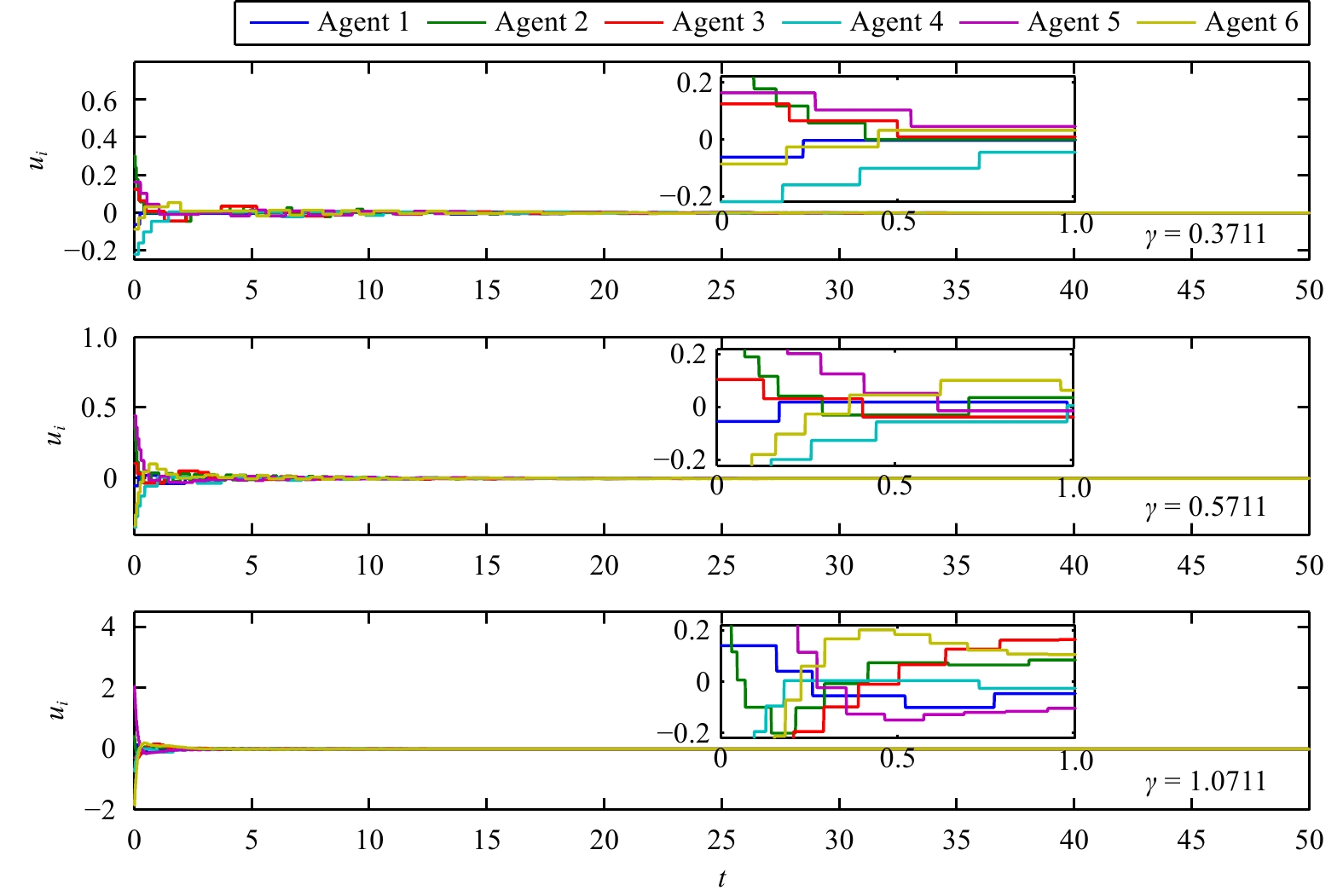
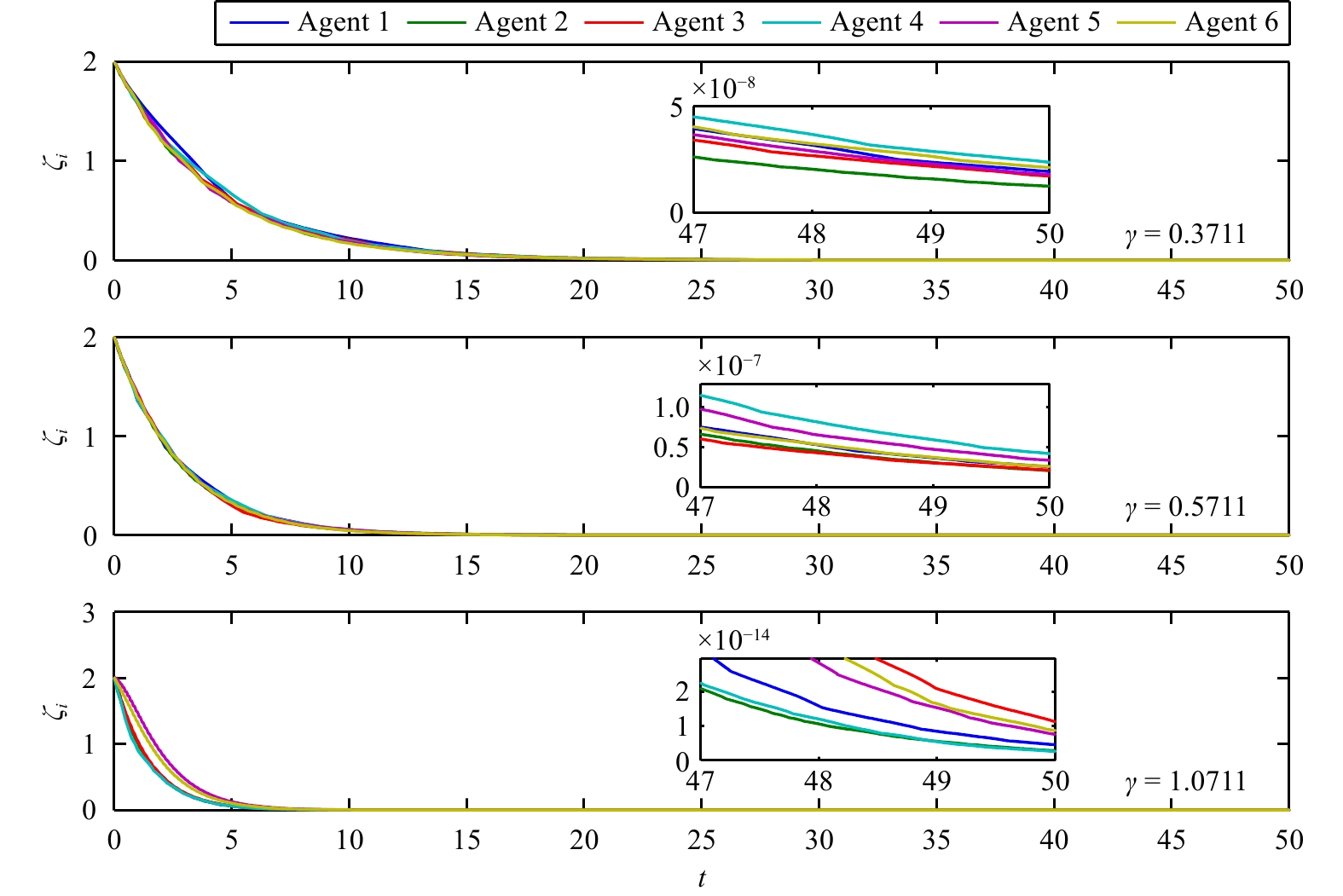
This paper investigates the consensus control of multi-agent systems (MASs) with constrained input using the dynamic event-triggered mechanism (ETM). Consider the MASs with small-scale networks where a centralized dynamic ETM with global information of the MASs is first designed. Then, a distributed dynamic ETM which only uses local information is developed for the MASs with large-scale networks. It is shown that the semi-global consensus of the MASs can be achieved by the designed bounded control protocol where the Zeno phenomenon is eliminated by a designable minimum inter-event time. In addition, it is easier to find a trade-off between the convergence rate and the minimum inter-event time by an adjustable parameter. Furthermore, the results are extended to regional consensus of the MASs with the bounded control protocol. Numerical simulations show the effectiveness of the proposed approach.

| [1] |
H. Su, G. Chen, X. Wang, and Z. Lin, “Adaptive second-order consensus of networked mobile agents with nonlinear dynamics,” Automatica, vol. 47, no. 2, pp. 368–375, Feb. 2011. doi: 10.1016/j.automatica.2010.10.050
|
| [2] |
T. Qian, Y. Liu, W. Zhang, W. Tang, and M. Shahidehpour, “Event-triggered updating method in centralized and distributed secondary controls for islanded microgrid restoration,” IEEE Trans. Smart Grid, vol. 11, no. 2, pp. 1387–1395, Mar. 2020. doi: 10.1109/TSG.2019.2937366
|
| [3] |
Z. Peng, J. Wang, D. Wang, and Q.-L. Han, “An overview of recent advances in coordinated control of multiple autonomous surface vehicles,” IEEE Trans. Ind. Informat., vol. 17, no. 2, pp. 732–745, Feb. 2021. doi: 10.1109/TII.2020.3004343
|
| [4] |
Z. Li and J. Zhao, “Adaptive consensus of non-strict feedback switched multi-agent systems with input saturations,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 11, pp. 1752–1761, Nov. 2021. doi: 10.1109/JAS.2021.1004165
|
| [5] |
J. Ni, C. Wen, and Y. Zhao, “Fixed-time leader-follower quantized output consensus of high-order multi-agent systems over digraph,” Inf. Sci., vol. 587, pp. 408–434, Dec. 2022. doi: 10.1016/j.ins.2021.12.054
|
| [6] |
S. Li, J. Zhang, X. Li, F. Wang, X. Luo, and X. Guan, “Formation control of heterogeneous discrete-time nonlinear multi-agent systems with uncertainties,” IEEE Trans. Ind. Electron., vol. 64, no. 6, pp. 4730–4740, Jun. 2017. doi: 10.1109/TIE.2017.2674590
|
| [7] |
S. Du, Q. Yan, L. Dong, and J. Qiao, “Secure consensus of multiagent systems with input saturation and distributed multiple DoS attacks,” IEEE Trans. Circuits Syst. II,Exp. Briefs, vol. 69, no. 4, pp. 2246–2250, Apr. 2022.
|
| [8] |
L. Rong, W. Zuo, H. Gao, and S. Xu, “Distributed robust semiglobal consensus with matched uncertainties and input saturation,” IEEE Trans. Circuits Syst. II,Exp. Briefs, vol. 69, no. 2, pp. 484–488, Feb. 2022.
|
| [9] |
Y. Yin, F. Wang, Z. Liu, and Z. Chen, “Finite-time leader-following consensus of multiagent systems with actuator faults and input saturation,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 52, no. 5, pp. 3314–3325, May 2022. doi: 10.1109/TSMC.2021.3064361
|
| [10] |
J. Fu, G. Wen, W. Yu, T. Huang, and X. Yu, “Consensus of second-order multiagent systems with both velocity and input constraints,” IEEE Trans. Ind. Electron., vol. 66, no. 10, pp. 7946–7955, Oct. 2019. doi: 10.1109/TIE.2018.2879292
|
| [11] |
H. Su, M. Z. Q. Chen, X. Wang, and J. Lam, “Semiglobal observer-based leader-following consensus with input saturation,” IEEE Trans. Ind. Electron., vol. 61, no. 6, pp. 2842–2850, Jun. 2014. doi: 10.1109/TIE.2013.2275976
|
| [12] |
W. He, B. Xu, Q. Han, and F. Qian, “Adaptive consensus control of linear multiagent systems with dynamic event-triggered strategies,” IEEE Trans. Cybern., vol. 50, no. 7, pp. 2996–3008, Jul. 2020. doi: 10.1109/TCYB.2019.2920093
|
| [13] |
K. Zhang, B. Zhou, W. Zheng, and G. Duan, “Finite-time stabilization of linear systems by bounded event-triggered and self-triggered control,” Inf. Sci., vol. 59, pp. 166–181, Mar. 2022.
|
| [14] |
R. Liu, M. Liu, D. Ye, and Y. Yu, “Event-triggered adaptive fixed-time fuzzy control for uncertain nonlinear systems with unknown actuator faults,” Inf. Sci., vol. 612, pp. 344–360, Aug. 2022. doi: 10.1016/j.ins.2022.08.036
|
| [15] |
Y. Xue, W. Ren, B.-C. Zheng, and J. Han, “Event-triggered adaptive sliding mode control of cyber-physical systems under false data injection attack,” Appl. Math. Comput., vol. 433, p. 127403, Jul. 2022. doi: 10.1016/j.amc.2022.127403
|
| [16] |
K. Zhang, B. Zhou, H. Jiang, and G. Duan, “Event-triggered and self-triggered gain scheduling control of input constrained systems with applications to the spacecraft rendezvous,” Int. J. Robust Nonlinear Control, vol. 31, pp. 4629–4646, Mar. 2021. doi: 10.1002/rnc.5495
|
| [17] |
E. Garcia, Y. Cao, and D. W. Casbeer, “Decentralized event-triggered consensus with general linear dynamics,” Automatica, vol. 50, no. 10, pp. 2633–2640, Oct. 2014. doi: 10.1016/j.automatica.2014.08.024
|
| [18] |
X. Guo, D. Zhang, J. Wang, and C. K. Ahn, “Adaptive memory event-triggered observer-based control for nonlinear multi-agent systems under DoS attacks,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 10, pp. 1644–1656, Oct. 2021. doi: 10.1109/JAS.2021.1004132
|
| [19] |
A. Wang, X. Liao, and H. He, “Event-triggered differentially private average consensus for multi-agent network,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 75–83, Jan. 2019. doi: 10.1109/JAS.2019.1911327
|
| [20] |
A. Girard, “Dynamic triggering mechanisms for event-triggered control,” IEEE Trans. Autom. Control, vol. 60, no. 7, pp. 1992–1997, Jul. 2015. doi: 10.1109/TAC.2014.2366855
|
| [21] |
K. Zhang, B. Zhou, and G. Duan, “Event-triggered and self-triggered control of discrete-time systems with input constraints,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 52, no. 3, pp. 1948–1957, Mar. 2022. doi: 10.1109/TSMC.2020.3035037
|
| [22] |
X. Ge, Q.-L. Han, X.-M. Zhang and D. Ding, “Dynamic event-triggered control and estimation: A survey,” Int. J. Autom. Comput., vol. 18, pp. 857–886, Jun. 2021. doi: 10.1007/s11633-021-1306-z
|
| [23] |
R. Koike, T. Endo, and F. Matsuno, “Output-based dynamic event-triggered consensus control for linear multiagent systems,” Automatica, vol. 133, p. 109863, Aug. 2021. doi: 10.1016/j.automatica.2021.109863
|
| [24] |
M. Li, Y. Long, T. Li, and C. L. P. Chen, “Consensus of linear multi-agent systems by distributed event-triggered strategy with designable minimum inter-event time,” Inf. Sci., vol. 609, pp. 644–659, Jul. 2022. doi: 10.1016/j.ins.2022.07.107
|
| [25] |
C. Deng, W. Che, and Z. Wu, “A dynamic periodic event-triggered approach to consensus of heterogeneous linear multiagent systems with time-varying communication delays,” IEEE Trans. Cybern., vol. 51, no. 4, pp. 1812–1821, Apr. 2021. doi: 10.1109/TCYB.2020.3015746
|
| [26] |
Y. Ju, D. Ding, X. He, Q.-L. Han, and G. Wei, “Consensus control of multi-agent systems using fault-estimation-in-the-loop: Dynamic event-triggered case,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 8, pp. 1440–1451, Aug. 2022. doi: 10.1109/JAS.2021.1004386
|
| [27] |
B. Chang, J. Fang, and X. Mu, “Fully distributed dynamic event-triggered control for multi-agent systems with input saturation and actuator failure,” Eur. J. Control, vol. 60, pp. 1–10, Apr. 2021. doi: 10.1016/j.ejcon.2021.03.001
|
| [28] |
G. Zhao, Z. Wang, and X. Fu, “Fully distributed dynamic event-triggered semiglobal consensus of multi-agent uncertain systems with input saturation via low-gain feedback,” Int. J. Control Autom. Sys., vol. 19, no. 4, pp. 1451–1460, Feb. 2021. doi: 10.1007/s12555-019-1080-7
|
| [29] |
Z. Wu, Y. Xu, R. Lu, Y. Wu, and T. Huang, “Event-triggered control for consensus of multiagent systems with fixed/switching topologies,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 48, no. 10, pp. 1736–1746, Oct. 2018. doi: 10.1109/TSMC.2017.2744671
|
| [30] |
J. Shi, “Cooperative control for nonlinear multi-agent systems based on event-triggered scheme,” IEEE Trans. Circuits Syst. II,Exp. Briefs, vol. 68, no. 6, pp. 1977–1981, Jun. 2021.
|
| [31] |
W. Xu, D. W. C. Ho, L. Li, and J. Cao, “Event-triggered schemes on leader-following consensus of general linear multiagent systems under different topologies,” IEEE Trans. Cybern., vol. 47, no. 1, pp. 212–223, Jan. 2017. doi: 10.1109/TCYB.2015.2510746
|
| [32] |
W. Hu, C. Yang, T. Huang, and W. Gui, “A distributed dynamic event-triggered control approach to consensus of linear multiagent systems with directed networks,” IEEE Trans. Cybern., vol. 50, no. 2, pp. 869–874, Feb. 2020. doi: 10.1109/TCYB.2018.2868778
|
| [33] |
B. Zhou, G. Duan, and Z. Lin, “A parametric Lyapunov equation approach to the design of low gain feedback,” IEEE Trans. Autom. Control, vol. 53, no. 6, pp. 1548–1554, Jul. 2008. doi: 10.1109/TAC.2008.921036
|
| [34] |
B. Zhou, “Truncated predictor feedback for time-delay systems,” Springer Berlin Heidelberg, 2014.
|
| [35] |
H. Wang, W. Yu, G. Wen, and G. Chen, “Finite-time bipartite consensus for multi-agent systems on directed signed networks,” IEEE Trans. Circuits Syst. I,Reg. Papers, vol. 65, no. 12, pp. 4336–4348, Dec. 2018. doi: 10.1109/TCSI.2018.2838087
|
| [36] |
W. Yu, G. Chen, M. Cao, and J. Kurths, “Second-order consensus for multiagent systems with directed topologies and nonlinear dynamics,” IEEE Trans. Syst.,Man,Cybern.,Part B (Cybern.), vol. 40, no. 3, pp. 881–891, Jun. 2010. doi: 10.1109/TSMCB.2009.2031624
|
| [37] |
Y. Fan, G. Feng, Y. Wang, and C. Song, “Distributed event-triggered control of multi-agent systems with combinational measurements,” Automatica, vol. 49, pp. 671–675, Feb. 2013. doi: 10.1016/j.automatica.2012.11.010
|
| [38] |
K. Zhang, B. Zhou, and H. Jiang, “Parametric Lyapunov equation based event-triggered and self-triggered control of input constrained linear systems,” Int. J. Robust Nonlinear Control, vol. 30, pp. 6606–6626, Sept. 2020. doi: 10.1002/rnc.5148
|
| [39] |
A. V. Proskurnikov and M. Mazo, “Lyapunov event-triggered stabilization with a known convergence rate,” IEEE Trans. Autom. Control, vol. 65, no. 2, pp. 507–521, Feb. 2020. doi: 10.1109/TAC.2019.2907435
|
| [40] |
J. Berneburg and C. Nowzari, “Robust dynamic event-triggered coordination with a designable minimum interevent time,” IEEE Trans. Autom. Control, vol. 66, no. 8, pp. 3417–3428, Aug. 2021. doi: 10.1109/TAC.2020.3020809
|
| [41] |
X. Li, X. Yang, and J. Cao, “Event-triggered impulsive control for nonlinear delay systems,” Automatica, vol. 117, p. 108981, Jul. 2020. doi: 10.1016/j.automatica.2020.108981
|
| [42] |
B. Cheng and Z. Li, “Fully distributed event-triggered protocols for linear multiagent networks,” IEEE Trans. Autom. Control, vol. 64, no. 4, pp. 1655–1662, Apr. 2019. doi: 10.1109/TAC.2018.2857723
|
| [43] |
L. Zhang, J. Sun, and Q. Yang, “Distributed model-based event-triggered leader-follower consensus control for linear continuous-time multiagent systems,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 51, no. 10, pp. 6457–6465, Oct. 2021. doi: 10.1109/TSMC.2019.2962735
|
| [44] |
X. Ge, S. Xiao, Q.-L. Han, X.-M. Zhang, and D. Ding, “Dynamic event-triggered scheduling and platooning control co-design for automated vehicles over vehicular ad-hoc networks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 31–46, Jan. 2022. doi: 10.1109/JAS.2021.1004060
|
Figures(11) / Tables(3)






 DownLoad:
DownLoad: