A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 2
Volume 11
Issue 2
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Ge, Q.-L. Han, X.-M. Zhang, and D. Ding, “Communication resource-efficient vehicle platooning control with various spacing policies,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 362–376, Feb. 2024. doi: 10.1109/JAS.2023.123507

|
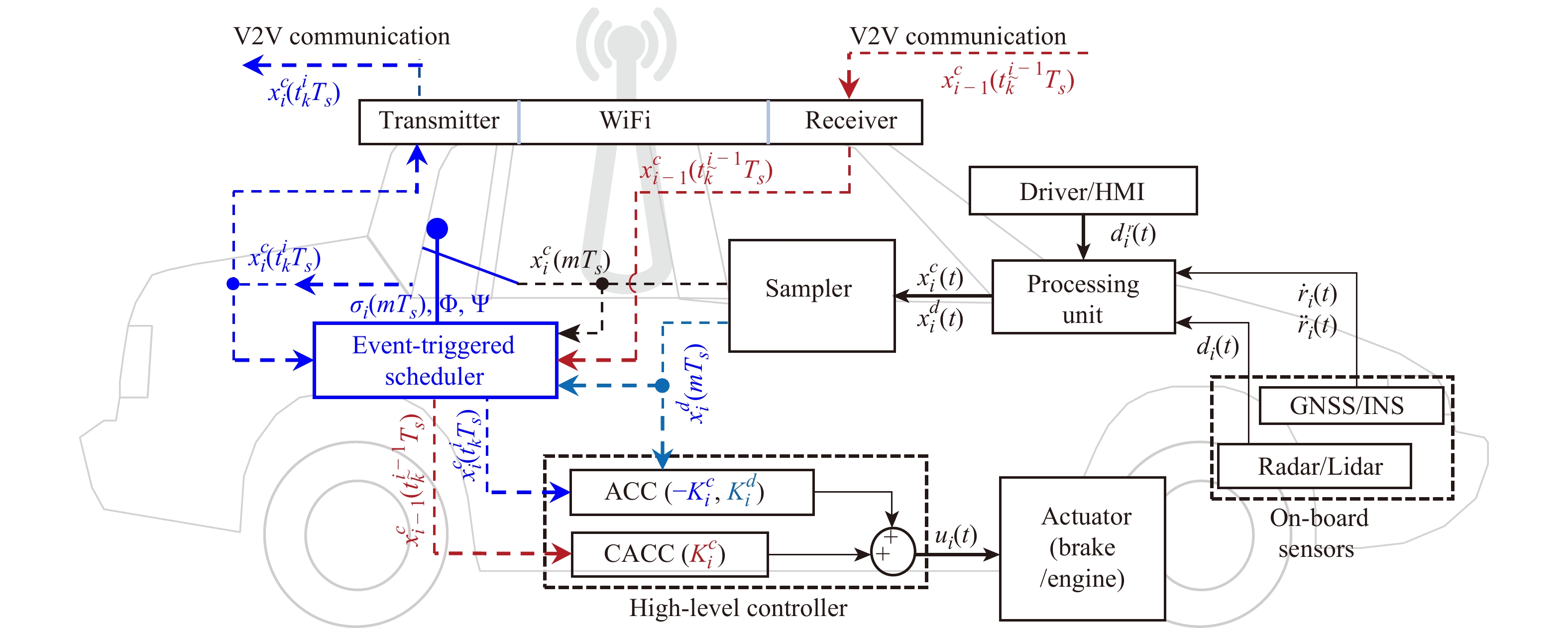
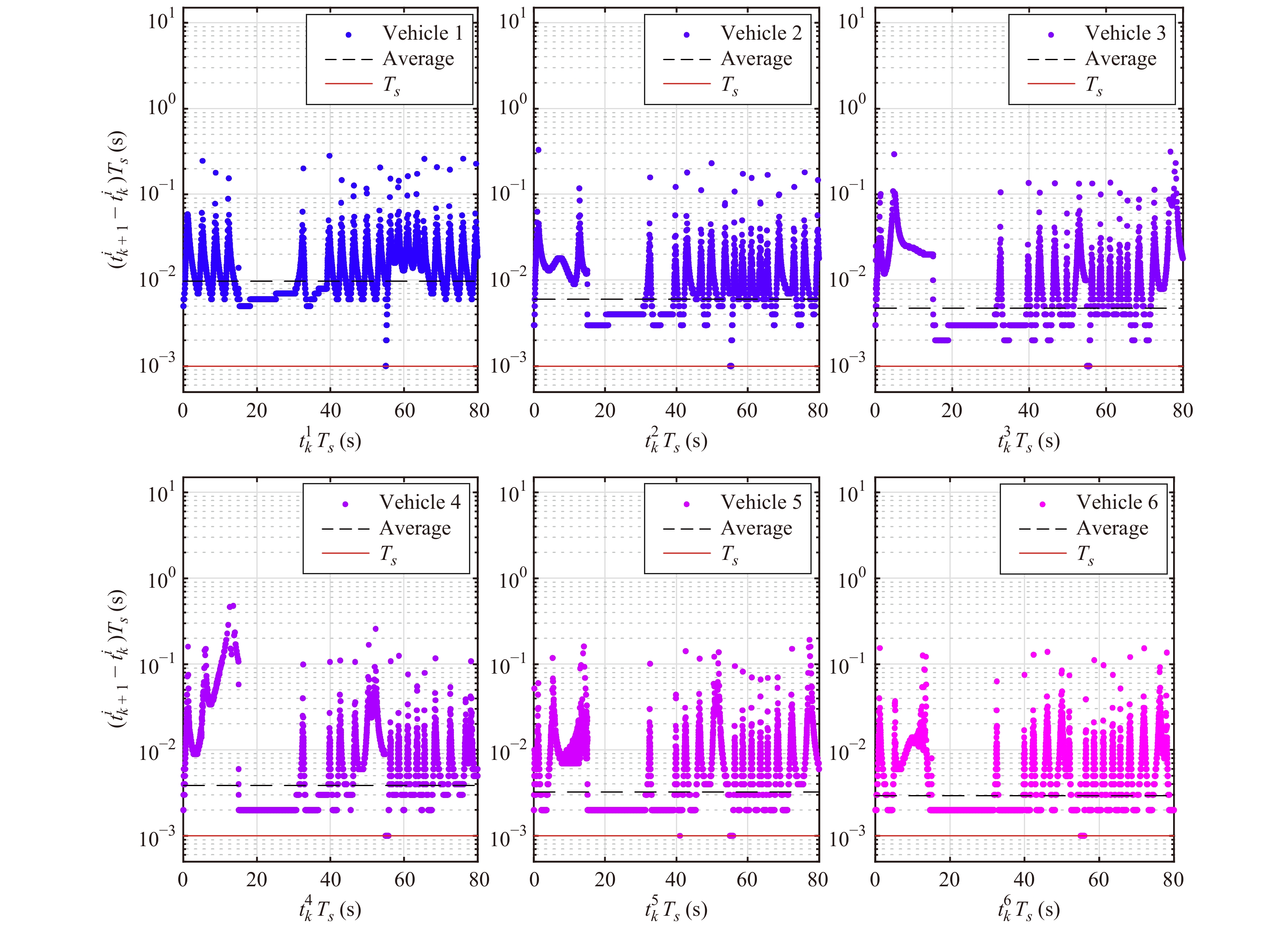
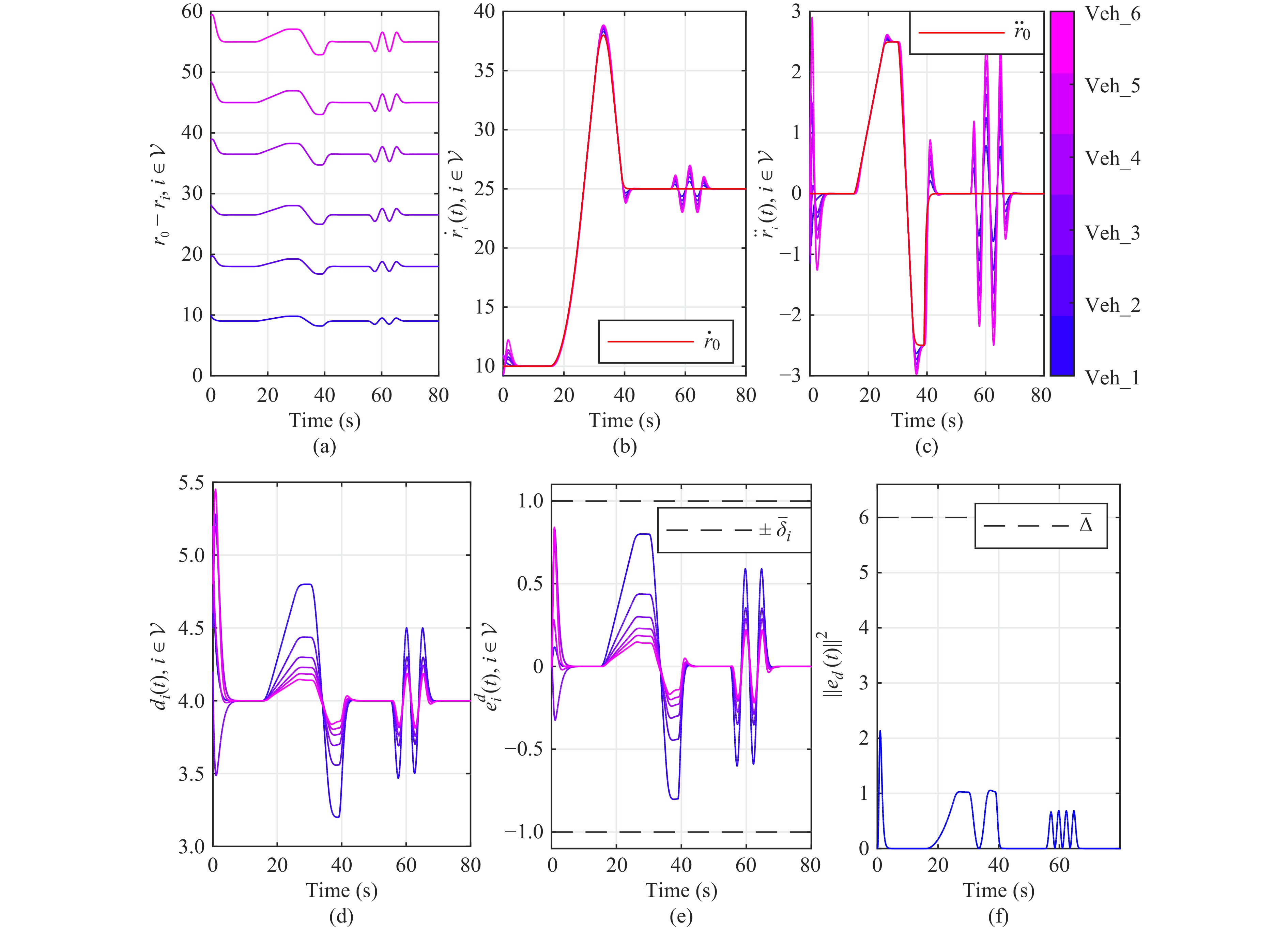
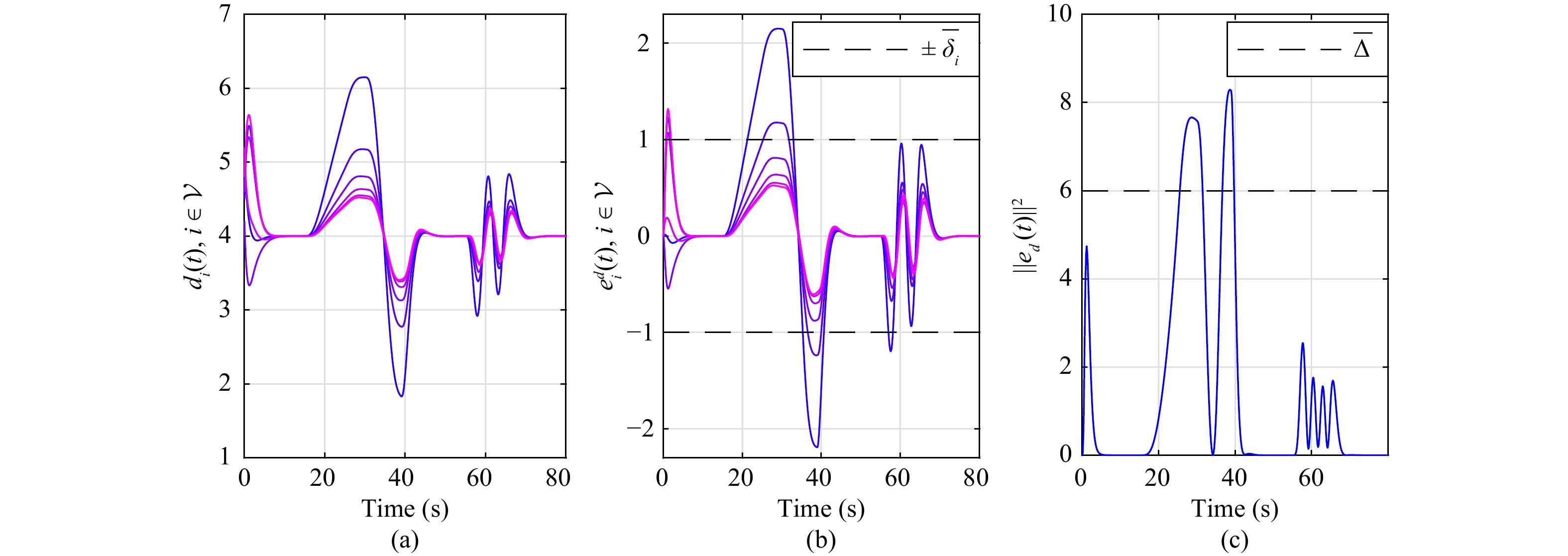
Platooning represents one of the key features that connected automated vehicles may possess as it allows multiple automated vehicles to be maneuvered cooperatively with small headways on roads. However, a critical challenge in accomplishing automated vehicle platoons is to deal with the effects of intermittent and sporadic vehicle-to-vehicle data transmissions caused by limited wireless communication resources. This paper addresses the co-design problem of dynamic event-triggered communication scheduling and cooperative adaptive cruise control for a convoy of automated vehicles with diverse spacing policies. The central aim is to achieve automated vehicle platooning under various gap references with desired platoon stability and spacing performance requirements, while simultaneously improving communication efficiency. Toward this aim, a dynamic event-triggered scheduling mechanism is developed such that the inter-vehicle data transmissions are scheduled dynamically and efficiently over time. Then, a tractable co-design criterion on the existence of both the admissible event-driven cooperative adaptive cruise control law and the desired scheduling mechanism is derived. Finally, comparative simulation results are presented to substantiate the effectiveness and merits of the obtained results.

| [1] |
F.-Y. Wang, N.-N. Zheng, D. Cao, C. Martinez, L. Li, and T. Liu, “Parallel driving in CPSS: A unified approach for transport automation and vehicle intelligence,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 4, pp. 577–587, 2017. doi: 10.1109/JAS.2017.7510598
|
| [2] |
S. Shladover, C. Nowakowski, X. Lu, and R. Ferlis, “Cooperative adaptive cruise control: Definitions and operating concepts,” Transp. Res. Rec.,J. Transp. Res. Board, vol. 2489, pp. 145–152, 2015. doi: 10.3141/2489-17
|
| [3] |
K. Dey, L. Yan, X. Wang, Y. Wang, H. Shen, M. Chowdhury, L. Yu, C. Qiu, and V. Soundararaj, “A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control (CACC),” IEEE Trans. Intell. Transp. Syst., vol. 17, no. 2, pp. 491–510, 2016. doi: 10.1109/TITS.2015.2483063
|
| [4] |
A. Alam, B. Besselink, V. Turri, J. Mårtensson, and K. Johansson, “Heavy-duty vehicle platooning for sustainable freight transportation,” IEEE Control Syst. Mag., vol. 35, no. 6, pp. 34–56, 2015. doi: 10.1109/MCS.2015.2471046
|
| [5] |
M. Fanti, A. Mangini, A. Favenza, and G. Difilippo, “An eco-route planner for heavy duty vehicles,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 1, pp. 37–51, 2021. doi: 10.1109/JAS.2020.1003456
|
| [6] |
G. Fiengo, D. Lui, A. Petrillo, S. Santini, and M. Tufo, “Distributed robust PID control for leader tracking in uncertain connected ground vehicles with V2V communication delay,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 3, pp. 1153–1165, 2019. doi: 10.1109/TMECH.2019.2907053
|
| [7] |
A. Ghasemi, R. Kazemi, and S. Azadi, “Stable decentralized control of platoon of vehicles with heterogeneous information feedback,” IEEE Trans. Veh. Technol., vol. 62, no. 9, pp. 4299–4308, 2013. doi: 10.1109/TVT.2013.2253500
|
| [8] |
A. Liu, T. Li, Y. Gu, and H. Dai, “Cooperative extended state observer based control of vehicle platoons with arbitrarily small time headway,” Automatica, vol. 129, art. no. 109678, 2021.
|
| [9] |
S. Xiao, X. Ge, Q.-L. Han, and Y. Zhang, “Secure and collision-free multi-platoon control of automated vehicles under data falsification attacks,” Automatica, vol. 145, art. no. 110531, 2022.
|
| [10] |
J. Monteil, G. Russo, and R. Shorten, “On $\mathcal{L}_{\infty}$ string stability of nonlinear bidirectional asymmetric heterogeneous platoon systems,” Automatica, vol. 105, pp. 198–205, 2019. doi: 10.1016/j.automatica.2019.03.025
|
| [11] |
J. Hu, Bhowmick, F. Arvin, A. Lanzon, and B. Lennox, “Cooperative control of heterogeneous connected vehicle platoons: An adaptive leaderfollowing approach,” IEEE Robot. Autom. Lett., vol. 5, no. 2, pp. 977–984, 2020. doi: 10.1109/LRA.2020.2966412
|
| [12] |
G. Silva, A. Donaire, A. McFadyen, and J. Ford, “String stable integral control design for vehicle platoons with disturbances,” Automatica, vol. 127, art. no. 109542, 2021.
|
| [13] |
X. Ge, Q.-L. Han, J. Wang, and X.-M. Zhang, “A scalable adaptive approach to multi-vehicle formation control with obstacle avoidance,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 990–1004, 2022. doi: 10.1109/JAS.2021.1004263
|
| [14] |
Y. Zhu, D. Zhao, and Z. Zhong, “Adaptive optimal control of heterogeneous CACC system with uncertain dynamics,” IEEE Trans. Control Syst. Technol., vol. 27, no. 4, pp. 1772–1779, 2019. doi: 10.1109/TCST.2018.2811376
|
| [15] |
J. Sahoo, E. Wu, Sahu, and M. Gerla, “Congestion-controlled-coordinator-based MAC for safety-critical message transmission in VANETs,” IEEE Trans. Intell. Transp. Syst., vol. 14, no. 3, pp. 1423–1437, 2013. doi: 10.1109/TITS.2013.2264320
|
| [16] |
X. Ge, Q.-L. Han, Q. Wu, and X.-M. Zhang, “Resilient and safe platooning control of connected automated vehicles against intermittent denial-of-service attacks,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1234–1251, 2023.
|
| [17] |
M. Xie, D. Ding, X. Ge, Q.-L. Han, H. Dong, and Y. Song, “Distributed platooning control of automated vehicles subject to replay attacks based on proportional integral observers,” IEEE/CAA J. Autom. Sinica, 2022, DOI: 10.1109/JAS.2022.105941.
|
| [18] |
W. Heemels, K. Johansson, and P. Tabuada, “An introduction to eventtriggered and self-triggered control,” in Proc. IEEE Conf. Decision Control, Maui, Hawaii, USA, pp. 3270–3285, 2012.
|
| [19] |
X.-M. Zhang, Q.-L. Han, X. Ge, D. Ding, L. Ding, D. Yue, and C. Peng, “Networked control systems: A survey of trends and techniques,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 1–17, 2020. doi: 10.1109/JAS.2019.1911861
|
| [20] |
X. Ge, Q.-L. Han, L. Ding, Y.-L. Wang, and X.-M. Zhang, “Dynamic event-triggered distributed coordination control and its applications: A survey of trends and techniques,” IEEE Trans. Syst.,Man,Cybern. Syst., vol. 50, no. 9, pp. 3112–3125, 2020. doi: 10.1109/TSMC.2020.3010825
|
| [21] |
C. Nowzari, E. Garcia, and J. Cortés, “Event-triggered communication and control of networked systems for multi-agent consensus,” Automatica, vol. 105, pp. 1–27, 2019. doi: 10.1016/j.automatica.2019.03.009
|
| [22] |
V. Dolk, J. Ploeg, and W. Heemels, “Event-triggered control for string-stable vehicle platooning,” IEEE Trans. Intell. Transp. Syst., vol. 18, no. 12, pp. 3486–3500, 2017. doi: 10.1109/TITS.2017.2738446
|
| [23] |
Z. Li, B. Hu, M. Li, and G. Luo, “String stability analysis for vehicle platooning under unreliable communication links with event-triggered strategy,” IEEE Trans. Veh. Technol., vol. 68, no. 3, pp. 2152–2164, 2019. doi: 10.1109/TVT.2019.2891681
|
| [24] |
S. Linsenmayer, D. Dimarogonas, and F. Allgöwer, “Event-based vehicle coordination using nonlinear unidirectional controllers,” IEEE Trans. Control Netw. Syst., vol. 5, no. 4, pp. 1575–1584, 2018. doi: 10.1109/TCNS.2017.2733959
|
| [25] |
J. Wang, F. Ma, Y. Yang, J. Nie, B. Aksun-Guvenc, and L. Guvenc, “Adaptive event-triggered platoon control under unreliable communication links,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 3, pp. 1924–1935, 2020.
|
| [26] |
S. Wen, G. Guo, B. Chen, and X. Gao, “Cooperative adaptive cruise control of vehicles using a resource-efficient communication mechanism,” IEEE Trans. Intell. Veh., vol. 4, no. 1, pp. 127–150, 2019. doi: 10.1109/TIV.2018.2886676
|
| [27] |
G. Wu, G. Chen, H. Zhang, and C. Huang, “Fully distributed event-triggered vehicular platooning with actuator uncertainties,” IEEE Trans. Veh. Technol., vol. 70, no. 7, pp. 6601–6612, 2021. doi: 10.1109/TVT.2021.3086824
|
| [28] |
W. Yue, L. Wang, and G. Guo, “Event-triggered platoon control of vehicles with time-varying delay and probabilistic faults,” Mech. Syst. Signal Process., vol. 87, pp. 96–117, 2017. doi: 10.1016/j.ymssp.2016.09.042
|
| [29] |
X. Ge, S. Xiao, Q.-L. Han, X.-M. Zhang, and D. Ding, “Dynamic event-triggered scheduling and platooning control co-design for automated vehicles over vehicular ad-hoc networks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 31–46, 2022. doi: 10.1109/JAS.2021.1004060
|
| [30] |
S. Xiao, X. Ge, Q.-L. Han, and Y. Zhang, “Resource-efficient platooning control of connected automated vehicles over VANETs,” IEEE Trans. Intell. Veh., vol. 7, no. 3, pp. 579–589, 2022. doi: 10.1109/TIV.2022.3155640
|
| [31] |
S. Stüdli, M. Seron, and R. Middleton, “From vehicular platoons to general networked systems: String stability and related concepts,” Annu. Rev. Control, vol. 44, pp. 152–172, 2017.
|
| [32] |
D. Swaroop and K. Hedrick, “String stability of interconnected systems,” IEEE Trans. Autom. Control, vol. 41, no. 3, pp. 349–357, 1996. doi: 10.1109/9.486636
|
| [33] |
A. Schwab and J. Lunze, “On the collision avoidance of adaptive cruise controllers: Comparison of string stability and external positivity,” in Proc. IEEE Conf. Control Technology and Applications, San Diego, California, pp. 20–25, 2021.
|
| [34] |
A. Rupp, M. Steinberger, and M. Horn, “Sliding mode based platooning with non-zero initial spacing errors,” IEEE Control Syst. Lett., vol. 1, no. 2, pp. 274–279, 2017. doi: 10.1109/LCSYS.2017.2714978
|
| [35] |
X.-G. Guo, J.-L. Wang, F. Liao, and R. Teo, “CNN-based distributed adaptive control for vehicle-following platoon with input saturation,” IEEE Trans. Intell. Transp. Syst., vol. 19, no. 9, pp. 3121–3132, 2018.
|
| [36] |
J. Wang, X. Luo, L. Wang, Z. Zuo, and X. Guan, “Integral sliding mode control using a disturbance observer for vehicle platoons,” IEEE Trans. Ind. Electron., vol. 67, no. 8, pp. 6639–6648, 2020. doi: 10.1109/TIE.2019.2936990
|
| [37] |
A. Ali, G. Garcia, and Martinet, “The flatbed platoon towing model for safe and dense platooning on highways,” IEEE Intell. Transp. Syst. Mag., vol. 7, no. 1, pp. 58–68, 2015. doi: 10.1109/MITS.2014.2328670
|
| [38] |
M. Hu, C. Li, Y. Bian, H. Zhang, Z. Qin, and B. Xu, “Fuel economy-oriented vehicle platoon control using economic model predictive control,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 11, pp. 20836–20849, 2022. doi: 10.1109/TITS.2022.3183090
|
| [39] |
Z. He, H. Kang, E. Li, E. Zhou, H. Cheng, and Y. Huang, “Coordinated control of heterogeneous vehicle platoon stability and energy-saving control strategies,” Physica A, vol. 606, p. 128155, 2022. doi: 10.1016/j.physa.2022.128155
|
| [40] |
D. Cao, X. Wang, L. Li, C. Lv, et al., “Future directions of intelligent vehicles: Potentials, possibilities, and perspectives,” IEEE Trans. Intell. Veh., vol. 7, no. 1, pp. 7–10, 2022. doi: 10.1109/TIV.2022.3157049
|
| [41] |
W. Xu, J. Kurths, G. Wen, and X. Yu, “Resilient event-triggered control strategies for second-order consensus,” IEEE Trans. Autom. Control, vol. 67, no. 8, pp. 4226–4233, 2022. doi: 10.1109/TAC.2021.3122382
|

Figures(8) / Tables(1)






 DownLoad:
DownLoad: