A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 10
Volume 10
Issue 10
IEEE/CAA Journal of Automatica Sinica
| Citation: | J. Y. Chai, Q. Lu, X. D. Tao, D. L. Peng, and B. T. Zhang, “Dynamic event-triggered fixed-time consensus control and its applications to magnetic map construction,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 10, pp. 2000–2013, Oct. 2023. doi: 10.1109/JAS.2023.123444

|
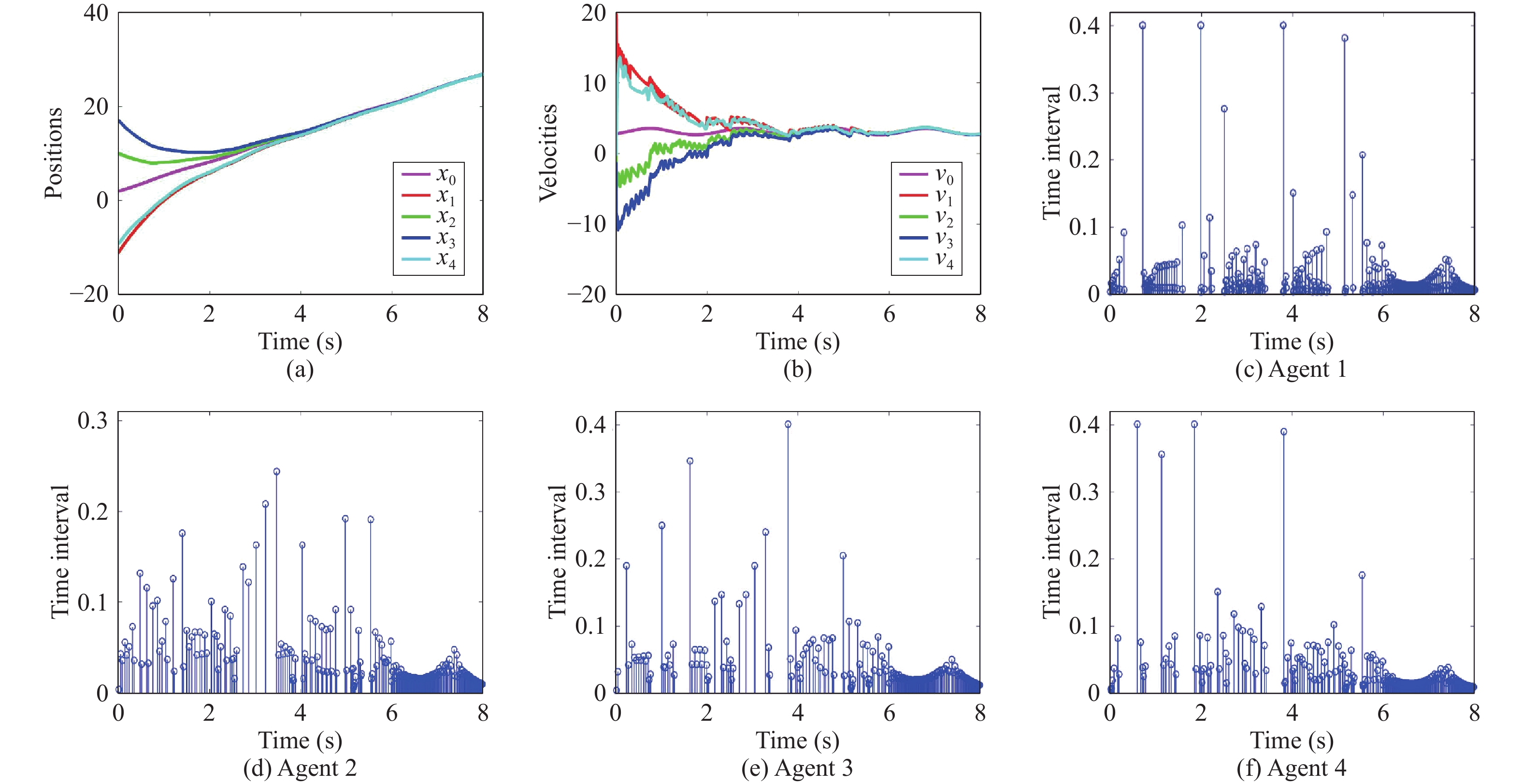
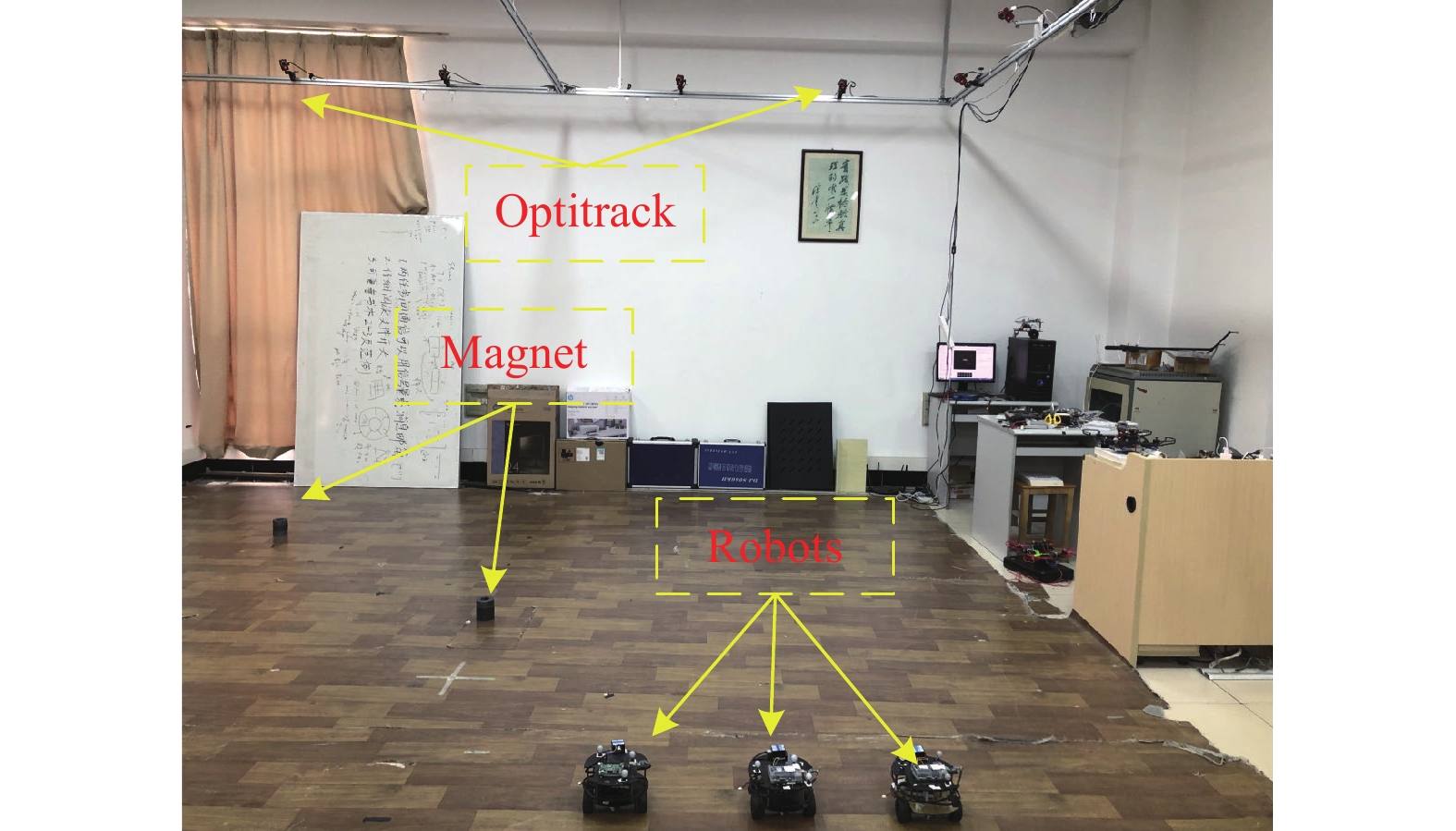
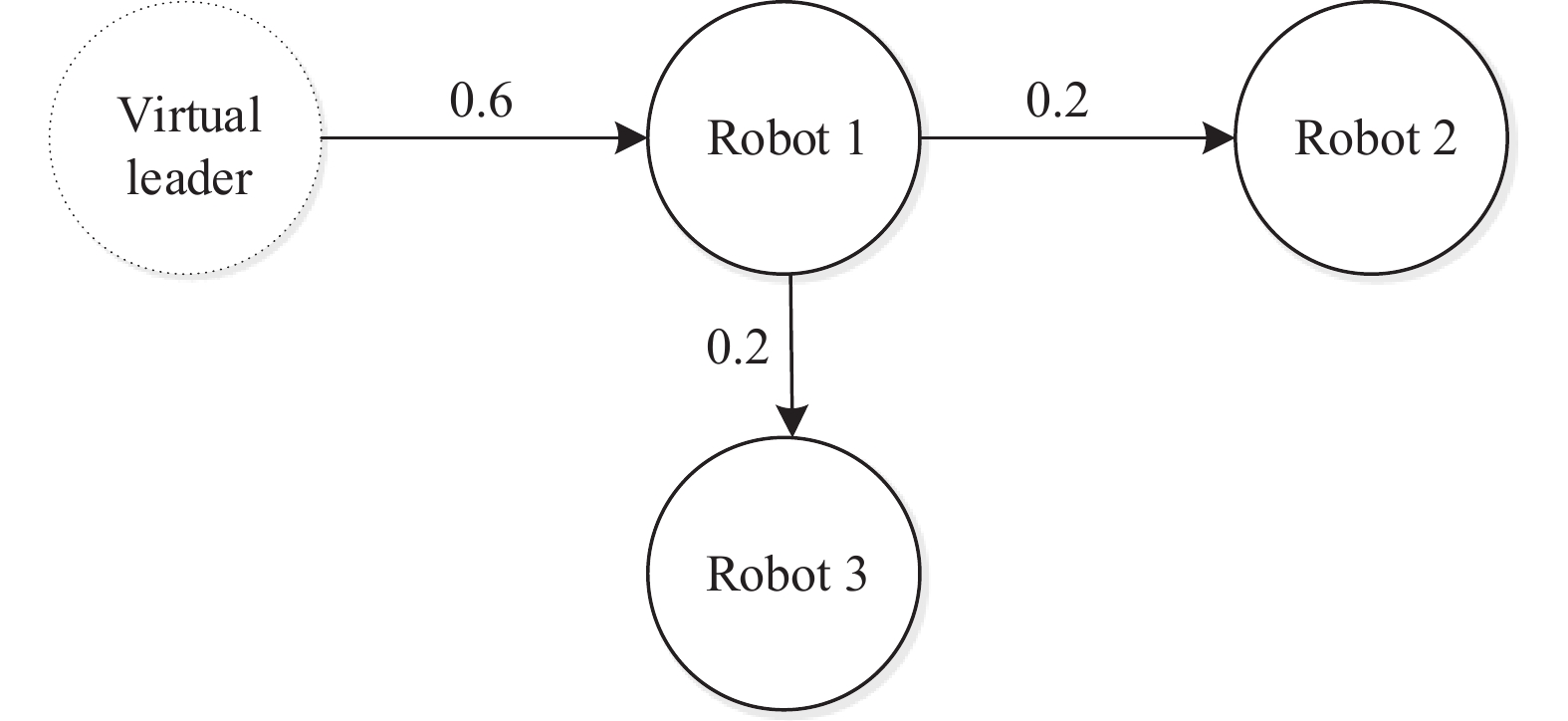
This article deals with the consensus problem of multi-agent systems by developing a fixed-time consensus control approach with a dynamic event-triggered rule. First, a new fixed-time stability condition is obtained where the less conservative settling time is given such that the theoretical settling time can well reflect the real consensus time. Second, a dynamic event-triggered rule is designed to decrease the use of chip and network resources where Zeno behaviors can be avoided after consensus is achieved, especially for finite/fixed-time consensus control approaches. Third, in terms of the developed dynamic event-triggered rule, a fixed-time consensus control approach by introducing a new item is proposed to coordinate the multi-agent system to reach consensus. The corresponding stability of the multi-agent system with the proposed control approach and dynamic event-triggered rule is analyzed based on Lyapunov theory and the fixed-time stability theorem. At last, the effectiveness of the dynamic event-triggered fixed-time consensus control approach is verified by simulations and experiments for the problem of magnetic map construction based on multiple mobile robots.

| [1] |
F. Amigoni, V. Caglioti, and G. Fontana, “A perceptive multirobot system for monitoring electro-magnetic fields,” in Proc. IEEE Symp. Virtual Environments, Human-Computer Interfaces and Measurement Systems, Boston, USA, 2004, pp. 95–100.
|
| [2] |
Y. Cao, W. Yu, W. Ren, and G. Chen, “An overview of recent progress in the study of distributed multi-agent coordination,” IEEE Trans. Ind. Inf., vol. 9, no. 1, pp. 427–438, Feb. 2013. doi: 10.1109/TII.2012.2219061
|
| [3] |
L. Hou, F. Fan, J. Fu, and J. Wang, “Time-varying algorithm for swarm robotics,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 217–222, Jan. 2018. doi: 10.1109/JAS.2017.7510685
|
| [4] |
Q. Lu, Q.-L. Han, D. Peng, and Y. Choi, “Decision and event-based fixed-time consensus control for electromagnetic source localization,” IEEE Trans. Cybern., vol. 52, no. 4, pp. 2186–2199, Apr. 2022. doi: 10.1109/TCYB.2020.3005964
|
| [5] |
J. Qin, Q. Ma, Y. Shi, and L. Wang, “Recent advances in consensus of multi-agent systems: A brief survey,” IEEE Trans. Ind. Electron., vol. 64, no. 6, pp. 4972–4983, Jun. 2017. doi: 10.1109/TIE.2016.2636810
|
| [6] |
J. Wang, Y. Hong, J. Wang, J. Xu, Y. Tang, Q.-L. Han, and J. Kurths, “Cooperative and competitive multi-agent systems: From optimization to games,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 763–783, May 2022. doi: 10.1109/JAS.2022.105506
|
| [7] |
A. Hirata, Y. Diao, T. Onishi, K. Sasaki, S. Ahn, D. Colombi, V. De Santis, I. Laakso, L. Giaccone, W. Joseph, E. A. Rashed, W. Kainz, and J. Chen, “Assessment of human exposure to electromagnetic fields: Review and future directions,” IEEE Trans. Electromagn. Compat., vol. 63, no. 5, pp. 1619–1630, Oct. 2021. doi: 10.1109/TEMC.2021.3109249
|
| [8] |
B. Li, T. Gallagher, A. G. Dempster, and C. Rizos, “How feasible is the use of magnetic field alone for indoor positioning?” in Proc. Int. Conf. Indoor Positioning and Indoor Navigation, Sydney, Australia, 2012, pp. 1–9.
|
| [9] |
S. M. Potirakis, A. Schekotov, T. Asano, and M. Hayakawa, “Natural time analysis on the ultra-low frequency magnetic field variations prior to the 2016 Kumamoto (Japan) earthquakes,” J. Asian Earth Sci., vol. 154, pp. 419–427, Apr. 2018. doi: 10.1016/j.jseaes.2017.12.036
|
| [10] |
B. Wang, D. Xia, Y. Yu, J. Jia, Y. Nie, and X. Wang, “Detecting the sensitivity of magnetic response on different pollution sources — A case study from typical mining cities in northwestern China,” Environ. Pollut., vol. 207, pp. 288–298, Dec. 2015. doi: 10.1016/j.envpol.2015.08.041
|
| [11] |
H. Liu, G. Zhou, T. Lei, and F. Tian, “Finite-time stability of linear time-varying continuous system with time-delay,” in Proc. 27th Chinese Control and Decision Conf., Qingdao, China, 2015, pp. 6063–6068.
|
| [12] |
R. R. Nair, L. Behera, and S. Kumar, “Event-triggered finite-time integral sliding mode controller for consensus-based formation of multirobot systems with disturbances,” IEEE Trans. Contr. Syst. Technol., vol. 27, no. 1, pp. 39–47, Jan. 2019. doi: 10.1109/TCST.2017.2757448
|
| [13] |
Y. Liu, F. Zhang, P. Huang, and Y. Lu, “Fixed-time consensus tracking for second-order multiagent systems under disturbance,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 51, no. 8, pp. 4883–4894, Aug. 2021. doi: 10.1109/TSMC.2019.2944392
|
| [14] |
B. Ning, Q.-L. Han, Z. Zuo, L. Ding, Q. Lu, and X. Ge, “Fixed-time and prescribed-time consensus control of multiagent systems and its applications: A survey of recent trends and methodologies,” IEEE Trans. Ind. Inf., vol. 19, no. 2, pp. 1121–1135, Feb. 2023. doi: 10.1109/TII.2022.3201589
|
| [15] |
Q. Xiao, H. Liu, and Y. Wang, “An improved finite-time and fixed-time stable synchronization of coupled discontinuous neural networks,” IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 7, pp. 3516–3526, Jul. 2023. doi: 10.1109/TNNLS.2021.3116320
|
| [16] |
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,” IEEE Trans. Autom. Control, vol. 57, no. 8, pp. 2106–2110, Aug. 2012. doi: 10.1109/TAC.2011.2179869
|
| [17] |
I. Ahmad, X. Ge, and Q.-L. Han, “Decentralized dynamic event-triggered communication and active suspension control of in-wheel motor driven electric vehicles with dynamic damping,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 971–986, May 2021. doi: 10.1109/JAS.2021.1003967
|
| [18] |
D. Liu and G.-H. Yang, “A dynamic event-triggered control approach to leader-following consensus for linear multiagent systems,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 51, no. 10, pp. 6271–6279, 2021. doi: 10.1109/TSMC.2019.2960062
|
| [19] |
J. Liu, Y. Yu, J. Sun, and C. Sun, “Distributed event-triggered fixed-time consensus for leader-follower multiagent systems with nonlinear dynamics and uncertain disturbances,” Int. J. Robust Nonlinear Control, vol. 28, no. 11, pp. 3543–3559, Jul. 2018. doi: 10.1002/rnc.4098
|
| [20] |
J. Liu, Y. Zhang, Y. Yu, and C. Sun, “Fixed-time leader-follower consensus of networked nonlinear systems via event/self-triggered control,” IEEE Trans. Neural Netw. Learn. Syst., vol. 31, no. 11, pp. 5029–5037, Nov. 2020. doi: 10.1109/TNNLS.2019.2957069
|
| [21] |
I. Ahmed, M. Rehan, and N. Iqbal, “A novel exponential approach for dynamic event-triggered leaderless consensus of nonlinear multi-agent systems over directed graphs,” IEEE Trans. Circuits Syst. II: Express Briefs, vol. 69, no. 3, pp. 1782–1786, Mar. 2022.
|
| [22] |
X. Ge, S. Xiao, Q.-L. Han, X.-M. Zhang, and D. Ding, “Dynamic event-triggered scheduling and platooning control co-design for automated vehicles over vehicular ad-hoc networks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 31–46, Jan. 2022. doi: 10.1109/JAS.2021.1004060
|
| [23] |
X. Ge, Q.-L. Han, L. Ding, Y.-L. Wang, and X.-M. Zhang, “Dynamic event-triggered distributed coordination control and its applications: A survey of trends and techniques,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 50, no. 9, pp. 3112–3125, Sept. 2020. doi: 10.1109/TSMC.2020.3010825
|
| [24] |
G. Zhao and C. Hua, “A hybrid dynamic event-triggered approach to consensus of multiagent systems with external disturbances,” IEEE Trans. Autom. Control, vol. 66, no. 7, pp. 3213–3220, Jul. 2021. doi: 10.1109/TAC.2020.3018437
|
| [25] |
L. Zhao, H. Wu, and J. Cao, “Finite/fixed-time bipartite consensus for networks of diffusion PDEs via event-triggered control,” Inf. Sci., vol. 609, pp. 1435–1450, Sept. 2022. doi: 10.1016/j.ins.2022.07.151
|
| [26] |
J. Liu, G. Ran, Y. Wu, L. Xue, and C. Sun, “Dynamic event-triggered practical fixed-time consensus for nonlinear multiagent systems,” IEEE Trans. Circuits Syst. II: Express Briefs, vol. 69, no. 4, pp. 2156–2160, Apr. 2022.
|
| [27] |
L. Feng, J. Yu, C. Hu, C. Yang, and H. Jiang, “Nonseparation method-based finite/fixed-time synchronization of fully complex-valued discontinuous neural networks,” IEEE Trans. Cybern., vol. 51, no. 6, pp. 3212–3223, Jun. 2021. doi: 10.1109/TCYB.2020.2980684
|
| [28] |
G. Ji, C. Hu, J. Yu, and H. Jiang, “Finite-time and fixed-time synchronization of discontinuous complex networks: A unified control framework design,” J. Franklin Inst., vol. 355, no. 11, pp. 4665–4685, Jul. 2018. doi: 10.1016/j.jfranklin.2018.04.026
|
| [29] |
C. Hu and H. Jiang, “Special functions-based fixed-time estimation and stabilization for dynamic systems,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 52, no. 5, pp. 3251–3262, May 2022. doi: 10.1109/TSMC.2021.3062206
|
| [30] |
C.-Y. Kim, D. Song, Y. Xu, J. Yi, and X. Wu, “Cooperative search of multiple unknown transient radio sources using multiple paired mobile robots,” IEEE Trans. Robot., vol. 30, no. 5, pp. 1161–1173, Oct. 2014. doi: 10.1109/TRO.2014.2333097
|
| [31] |
J. Nam, W. Lee, B. Jang, and G. Jang, “Magnetic navigation system utilizing resonant effect to enhance magnetic field applied to magnetic robots,” IEEE Trans. Ind. Electron., vol. 64, no. 6, pp. 4701–4709, Jun. 2017. doi: 10.1109/TIE.2017.2669886
|
| [32] |
J. R. T. Lawton, R. W. Beard, and B. J. Young, “A decentralized approach to formation maneuvers,” IEEE Trans. Robot. Autom., vol. 19, no. 6, pp. 933–941, Dec. 2003. doi: 10.1109/TRA.2003.819598
|
| [33] |
R. Wei and R. W. Beard, Distributed Consensus in Multi-Vehicle Cooperative Control. London, UK: Springer, 2008.
|
| [34] |
W. Hu, C. Yang, T. Huang, and W. Gui, “A distributed dynamic event-triggered control approach to consensus of linear multiagent systems with directed networks,” IEEE Trans. Cybern., vol. 50, no. 2, pp. 869–874, Feb. 2020. doi: 10.1109/TCYB.2018.2868778
|
| [35] |
Q. Lu, Q.-L. Han, C. Zhong, B. Zhang, J. Wang, S. Liu, and J. Wang, “Finite-time consensus analysis under directed communication topologies for multi-agent systems,” in Proc. 20th World Congr. Int. Federation of Autom. Control, Toulouse, France, 2017, pp. 621–626.
|
Figures(7) / Tables(6)






 DownLoad:
DownLoad: