A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 10
Volume 10
Issue 10
IEEE/CAA Journal of Automatica Sinica
| Citation: | D. Y. Meng and J. Y. Zhang, “Fundamental trackability problems for iterative learning control,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 10, pp. 1933–1950, Oct. 2023. doi: 10.1109/JAS.2023.123312

|
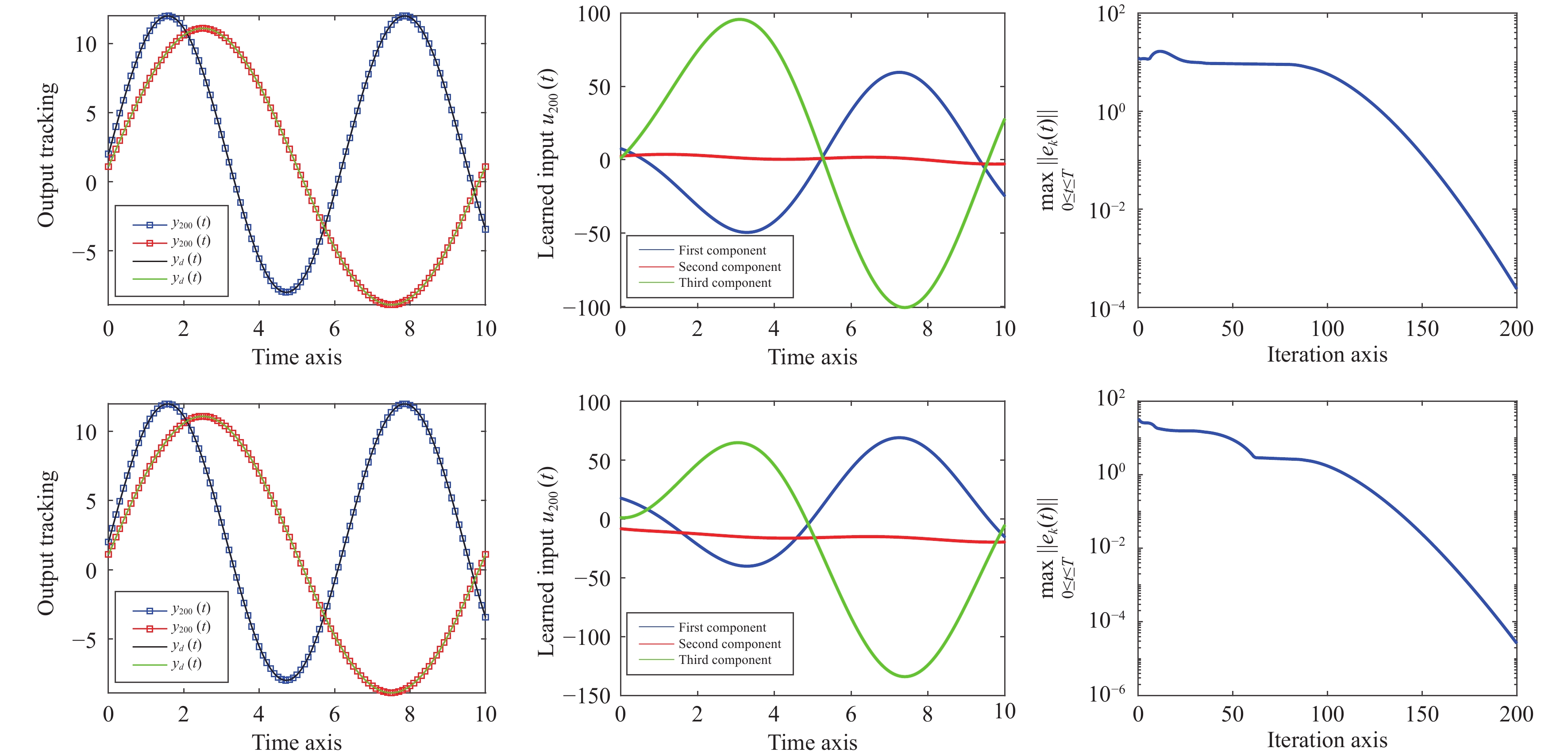
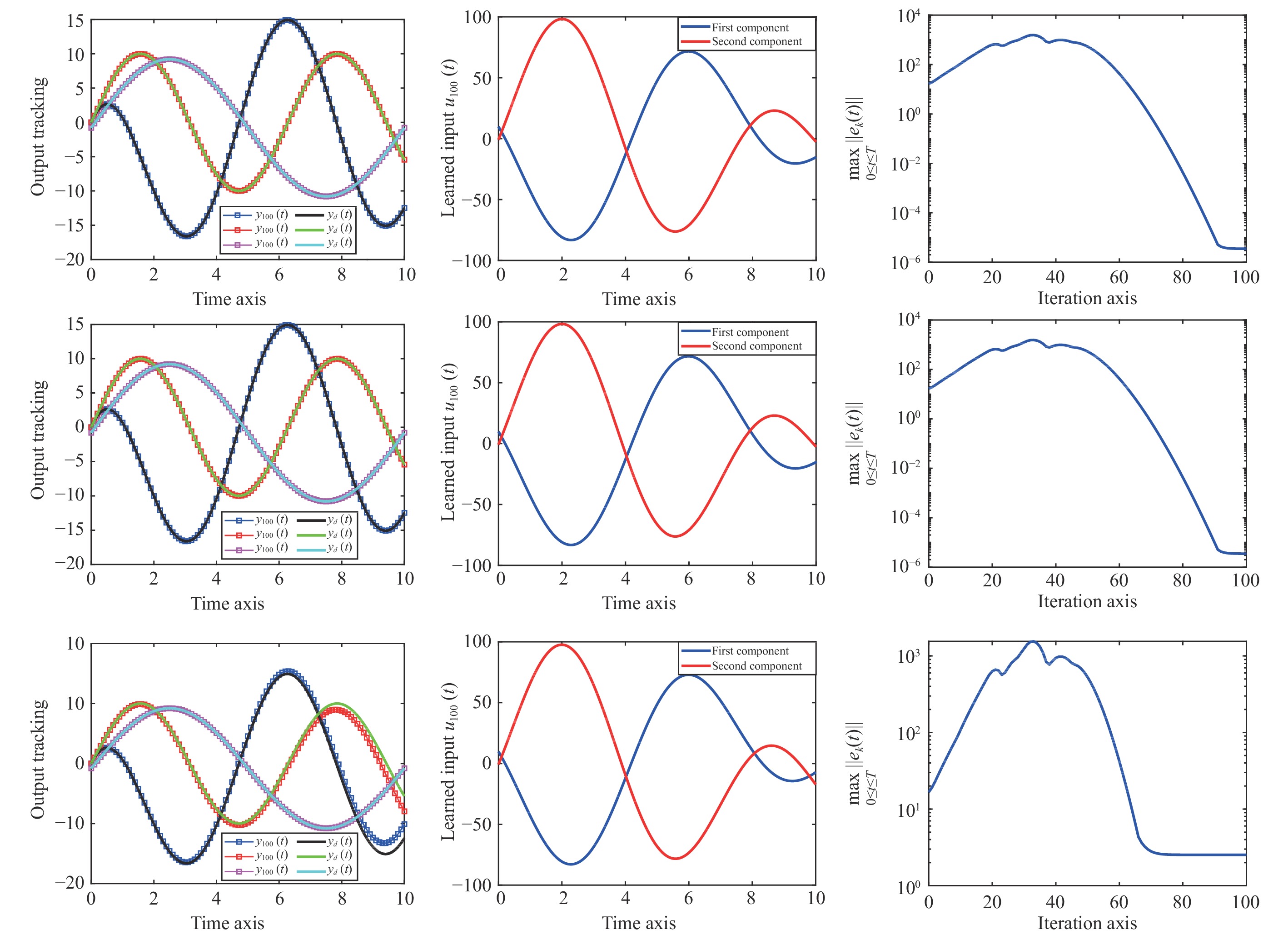
Generally, the classic iterative learning control (ILC) methods focus on finding design conditions for repetitive systems to achieve the perfect tracking of any specified trajectory, whereas they ignore a fundamental problem of ILC: whether the specified trajectory is trackable, or equivalently, whether there exist some inputs for the repetitive systems under consideration to generate the specified trajectory? The current paper contributes to dealing with this problem. Not only is a concept of trackability introduced formally for any specified trajectory in ILC, but also some related trackability criteria are established. Further, the relation between the trackability and the perfect tracking tasks for ILC is bridged, based on which a new convergence analysis approach is developed for ILC by leveraging properties of a functional Cauchy sequence (FCS). Simulation examples are given to verify the effectiveness of the presented trackability criteria and FCS-induced convergence analysis method for ILC.

| [1] |
S. Arimoto, S. Kawamura, and F. Miyazaki, “Bettering operation of robots by learning,” Journal of Robotic Systems, vol. 1, no. 2, pp. 123–140, 1984. doi: 10.1002/rob.4620010203
|
| [2] |
W. He, T. Meng, X. He, and S. S. Ge, “Unified iterative learning control for flexible structures with input constraints,” Automatica, vol. 96, pp. 326–336, Oct. 2018. doi: 10.1016/j.automatica.2018.06.051
|
| [3] |
Q. Yu and Z. Hou, “Adaptive fuzzy iterative learning control for high-speed trains with both randomly varying operation lengths and system constraints,” IEEE Trans. Fuzzy Systems, vol. 29, no. 8, pp. 2408–2418, Aug. 2021. doi: 10.1109/TFUZZ.2020.2999958
|
| [4] |
J. Wang, Y. Wang, L. Cao, and Q. Jin, “Adaptive iterative learning control based on unfalsified strategy for Chylla-Haase reactor,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 4, pp. 347–360, Oct. 2014. doi: 10.1109/JAS.2014.7004663
|
| [5] |
T. He and Z. Wu, “Iterative learning disturbance observer based attitude stabilization of flexible spacecraft subject to complex disturbances and measurement noises,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 9, pp. 1576–1587, Sept. 2021. doi: 10.1109/JAS.2021.1003958
|
| [6] |
Y. Hui, R. Chi, B. Huang, and Z. Hou, “3-D learning-enhanced adaptive ILC for iteration-varying formation tasks,” IEEE Trans. Neural Networks and Learning Systems, vol. 31, no. 1, pp. 89–99, Jan. 2020. doi: 10.1109/TNNLS.2019.2899632
|
| [7] |
R.-E. Precup, S. Preitl, J. K. Tar, M. L. Tomescu, M. Takacs, Korondi, and Baranyi, “Fuzzy control system performance enhancement by iterative learning control,” IEEE Trans. Industrial Electronics, vol. 55, no. 9, pp. 3461–3475, Sept. 2008. doi: 10.1109/TIE.2008.925322
|
| [8] |
R.-E. Precup, R.-C. Roman, E.-L. Hedrea, C.-A. Bojan-Dragos, M.-M. Damian, and M.-L. Nedelcea, “Performance improvement of low-cost iterative learning-based fuzzy control systems for tower crane systems,” Int. Journal of Computers Communications & Control, vol. 17, no. 1, Article Number: 4623, Feb. 2022.
|
| [9] |
D. A. Bristow, M. Tharayil, and A. G. Alleyne, “A survey of iterative learning control: A learning-based method for high-performance tracking control,” IEEE Control Systems Magazine, vol. 26, no. 3, pp. 96–114, Jun. 2006. doi: 10.1109/MCS.2006.1636313
|
| [10] |
H.-S. Ahn, Y. Chen, and K. L. Moore, “Iterative learning control: Brief survey and categorization,” IEEE Trans. Systems,Man,and Cybernetics, Part C: Applications and Reviews, vol. 37, no. 6, pp. 1099–1121, Nov. 2007. doi: 10.1109/TSMCC.2007.905759
|
| [11] |
D. Shen, “Iterative learning control with incomplete information: A survey,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 5, pp. 885–901, Sept. 2018. doi: 10.1109/JAS.2018.7511123
|
| [12] |
H.-S. Ahn, C.-H. Choi, and K.-B. Kim, “Iterative learning control for a class of nonlinear systems,” Automatica, vol. 29, no. 6, pp. 1575–1578, Nov. 1993. doi: 10.1016/0005-1098(93)90024-N
|
| [13] |
S. S. Saab, “A discrete-time learning control algorithm for a class of linear time-invariant systems,” IEEE Trans. Automatic Control, vol. 40, no. 6, pp. 1138–1142, Jun. 1995. doi: 10.1109/9.388702
|
| [14] |
D. Meng and Y. Wu, “Control design for iterative methods in solving linear algebraic equations,” IEEE Trans. Automatic Control, DOI: 10.1109/TAC.2021.3115455.
|
| [15] |
D. Meng and K. L. Moore, “Robust iterative learning control for nonrepetitive uncertain systems,” IEEE Trans. Automatic Control, vol. 62, no. 2, pp. 907–913, Feb. 2017. doi: 10.1109/TAC.2016.2560961
|
| [16] |
J. Zhang and D. Meng, “Iterative rectifying methods for nonrepetitive continuous-time learning control systems,” IEEE Trans. Cybernetics, DOI: 10.1109/TCYB.2021.3086091.
|
| [17] |
D. Meng and J. Zhang, “Convergence analysis of robust iterative learning control against nonrepetitive uncertainties: System equivalence transformation,” IEEE Trans. Neural Networks and Learning Systems, vol. 32, no. 9, pp. 3867–3879, Sept. 2021. doi: 10.1109/TNNLS.2020.3016057
|
| [18] |
J. I. Poveda, M. Benosman, and A. R. Teel, “Hybrid online learning control in networked multiagent systems: A survey,” Int. Journal of Adaptive Control and Signal Processing, vol. 33, no. 2, pp. 228–261, Feb. 2019. doi: 10.1002/acs.2866
|
| [19] |
R. A. Horn and C. R. Johnson, Matrix Analysis. Cambridge: Cambridge University Press, 1985.
|
| [20] |
P. J. Antsaklis and A. N. Michel, Linear Systems. Boston: Birkhauser, 2006.
|
| [21] |
K. H. Lundberg, H. R. Miller, and D. L. Trumper, “Initial conditions, generalized functions, and the laplace transform: Troubles at the origin,” IEEE Control Systems Magazine, vol. 27, no. 1, pp. 22–35, Feb. 2007. doi: 10.1109/MCS.2007.284506
|
| [22] |
B. Porter and S. S. Mohamed, “Iterative learning control of partially irregular multivariable plants with initial impulsive action,” Int. Journal of Systems Science, vol. 22, no. 3, pp. 447–454, 1991. doi: 10.1080/00207729108902362
|
| [23] |
T. Sugie and T. Ono, “An iterative learning control law for dynamical systems,” Automatica, vol. 27, no. 4, pp. 729–732, Jul. 1991. doi: 10.1016/0005-1098(91)90066-B
|
| [24] |
M.-X. Sun and Q.-Z. Yan, “Error tracking of iterative learning control systems,” Acta Automatica Sinica, vol. 39, no. 3, pp. 251–262, Mar. 2013. doi: 10.1016/S1874-1029(13)60027-0
|
| [25] |
X.-D. Li, T. W. S. Chow, and J. K. L. Ho, “2-D system theory based iterative learning control for linear continuous systems with time delays,” IEEE Trans. Circuits and Systems-I: Regular Papers, vol. 52, no. 7, pp. 1421–1430, Jul. 2005. doi: 10.1109/TCSI.2005.851706
|
Figures(2)






 DownLoad:
DownLoad: