A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 2
Volume 10
Issue 2
IEEE/CAA Journal of Automatica Sinica
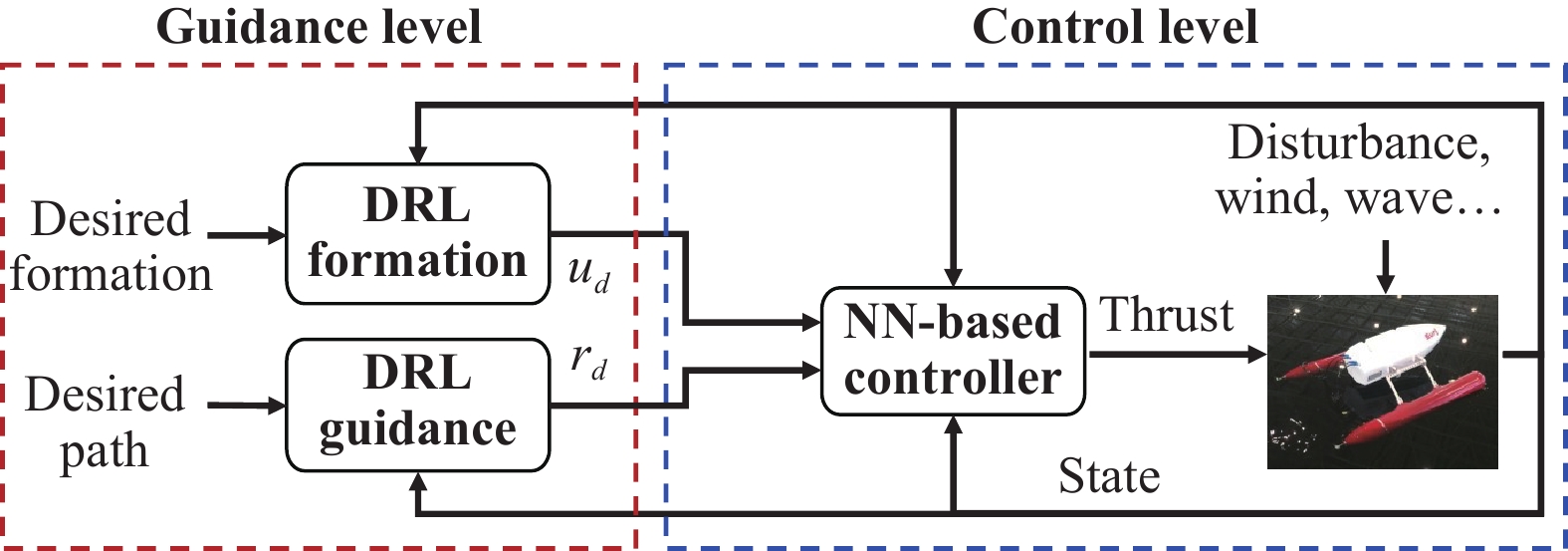
| Citation: | Z. Q. Han, Y. T. Wang, and Q. Sun, “Straight-path following and formation control of USVs using distributed deep reinforcement learning and adaptive neural network,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 572–574, Feb. 2023. doi: 10.1109/JAS.2023.123255

|

| [1] |
Z. Peng, J. Wang, D. Wang, and Q.-L. Han, “An overview of recent advances in coordinated control of multiple autonomous surface vehicles,” IEEE Trans. Ind. Informat., vol. 17, no. 2, pp. 732–745, 2021. doi: 10.1109/TII.2020.3004343
|
| [2] |
T. I. Fossen, Handbook of Marine Craft Hydrodynamics and Motion Control, Hoboken, USA: Wiley, 2011.
|
| [3] |
Z. Peng, J. Wang, and Q.-L. Han, “Path-following control of autonomous underwater vehicles subject to velocity and input constraints via neurodynamic optimization,” IEEE Trans. Ind. Electron., vol. 66, no. 11, pp. 8724–8732, 2019. doi: 10.1109/TIE.2018.2885726
|
| [4] |
Z. Zhang, Y. Shi, Z. Zhang, and W. Yan, “New results on sliding-mode control for takagi-sugeno fuzzy multiagent systems,” IEEE Trans. Cybern., vol. 49, no. 5, pp. 1592–1604, 2019. doi: 10.1109/TCYB.2018.2804759
|
| [5] |
L. Chen, R. Cui, C. Yang, and W. Yan, “Adaptive neural network control of underactuated surface vessels with guaranteed transient performance: Theory and experimental results,” IEEE Trans. Ind. Electron., vol. 67, no. 5, pp. 4024–4035, 2020. doi: 10.1109/TIE.2019.2914631
|
| [6] |
C. Shen, Y. Shi, and B. Buckham, “Trajectory tracking control of an autonomous underwater vehicle using Lyapunov-based model predictive control,” IEEE Trans. Ind. Electron., vol. 65, no. 7, pp. 5796–5805, 2018. doi: 10.1109/TIE.2017.2779442
|
| [7] |
A. B. Martinsen and A. M. Lekkas, “Straight-path following for underactuated marine vessels using deep reinforcement learning,” IFAC-PapersOnLine, vol. 51, no. 29, pp. 329–334, 2018. doi: 10.1016/j.ifacol.2018.09.502
|
| [8] |
J. Woo, C. Yu, and N. Kim, “Deep reinforcement learning-based controller for path following of an unmanned surface vehicle,” Ocean Eng., vol. 183, pp. 155–166, 2019. doi: 10.1016/j.oceaneng.2019.04.099
|
| [9] |
A. Gonzalez-Garcia, H. Castañeda, and L. Garrido, “USV path-following control based on deep reinforcement learning and adaptive control,” in Proc. Global Oceans, Singapore U.S. Gulf Coast, 2020, pp. 1–7.
|
| [10] |
Y. Wang and W. Yan, “Path parameters consensus based formation control of multiple autonomous underwater vehicles in the presence of ocean currents,” in Proc. 17th IEEE Int. Conf. Methods Models Autom. Robot., 2012, pp. 427–432.
|
| [11] |
R. P. Jain, A. P. Aguiar, and J. B. de Sousa, “Cooperative path following of robotic vehicles using an event-based control and communication strategy,” IEEE Robot. Autom. Lett., vol. 3, no. 3, pp. 1941–1948, 2018. doi: 10.1109/LRA.2018.2808363
|
| [12] |
X. Wang, B. Zerr, H. Thomas, B. Clement, and Z. Xie, “Pattern formation for a fleet of AUVs based on optical sensor,” in Proc. IEEE OCEANS Aberdeen, 2017, pp. 1–9.
|
| [13] |
S. Wang, F. Ma, X. Yan, P. Wu, and Y. Liu, “Adaptive and extendable control of unmanned surface vehicle formations using distributed deep reinforcement learning,” Appl. Ocean Res., vol. 110, p. 102590, 2021.
|
| [14] |
T. P. Lillicrap, et al., “Continuous control with deep reinforcement learning,” in Proc. Int. Conf. Learn. Represent., 2016, pp. 1–14.
|
| [15] |
H. Niu, Y. Lu, A. Savvaris, and A. Tsourdos, “Efficient path following algorithm for unmanned surface vehicle,” in Proc. IEEE OCEANS Shanghai, 2016, pp. 1–7.
|
| [16] |
R. Olfati-Saber, “Flocking for multi-agent dynamic systems: Algorithms and theory,” IEEE Trans. Autom. Control, vol. 51, no. 3, pp. 401–420, 2006. doi: 10.1109/TAC.2005.864190
|
Figures(5) / Tables(1)






 DownLoad:
DownLoad: