A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 2
Volume 10
Issue 2
IEEE/CAA Journal of Automatica Sinica
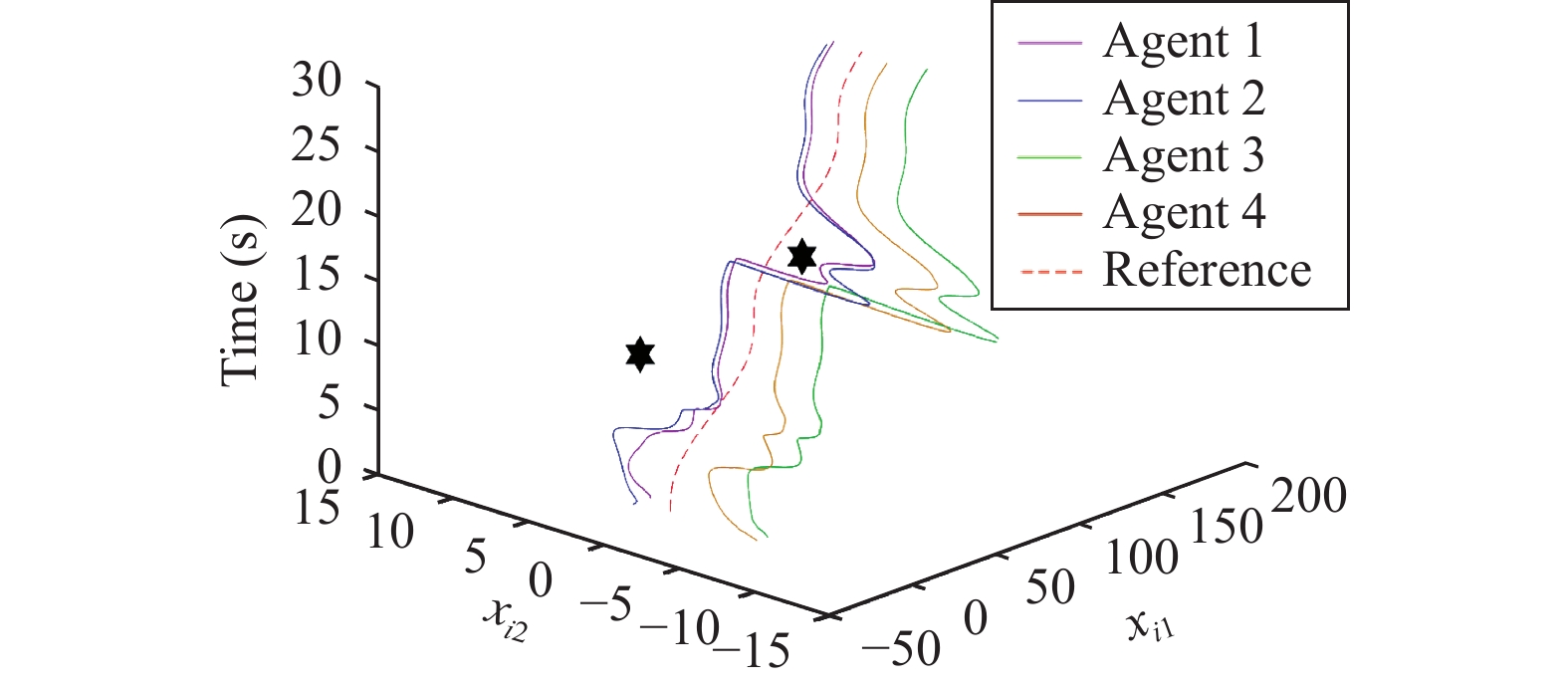
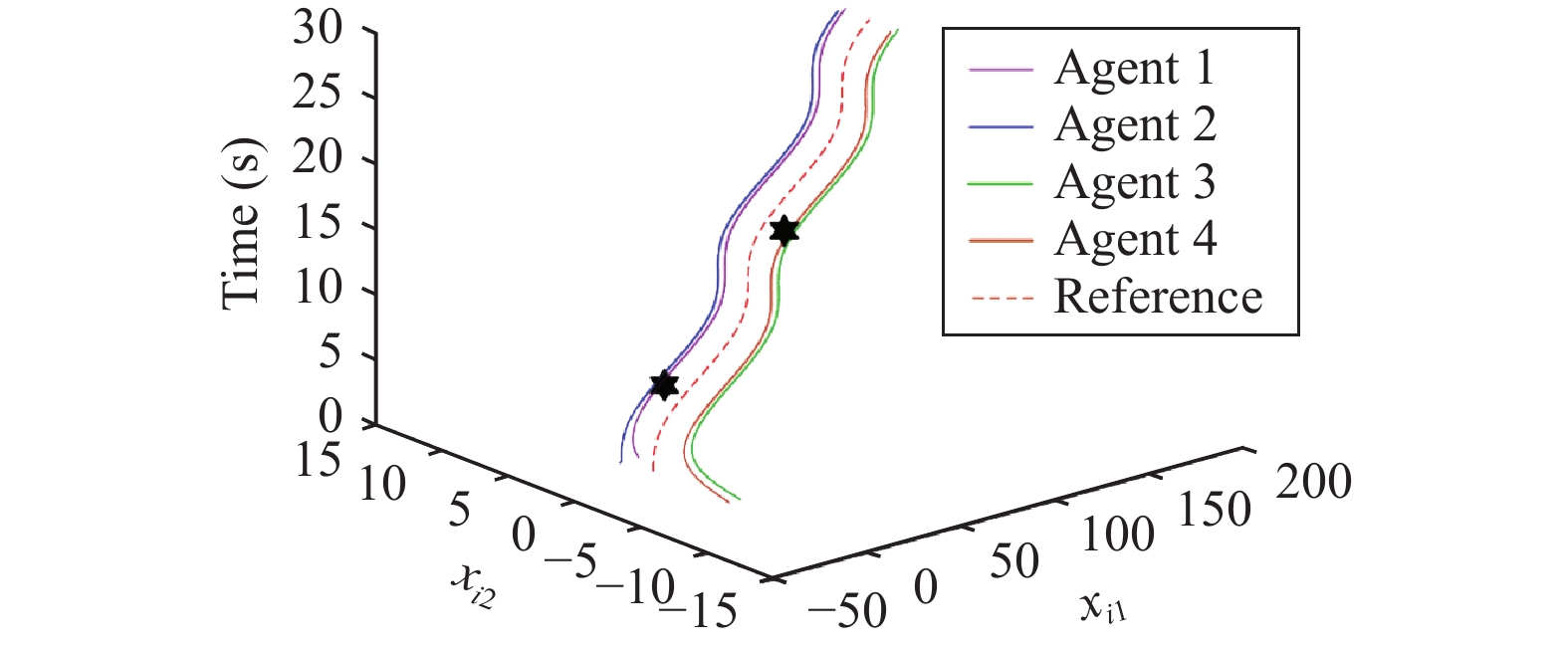
| Citation: | J. X. Zhang, W. Liu, and Y. M. Li, “Optimal formation control for second-order multi-agent systems with obstacle avoidance,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 563–565, Feb. 2023. doi: 10.1109/JAS.2023.123249

|

| [1] |
S. Lee, H. Kim, and B. Lee, “An efficient rescue system with online multi-agent SLAM framework,” Sensors, vol. 20, no. 1, p. 235, 2020.
|
| [2] |
J. Chen, J. Sun, and G. Wang, “From unmanned systems to autonomous intelligent systems,” Engineering, vol. 12, no. 5, pp. 16–19, 2022.
|
| [3] |
D. Lorenzo, “Multi-agent fuzzy logic controller applied to one lever variable pitch turboprop aircraft,” EDF Sciences, vol. 312, p. 11012, 2021.
|
| [4] |
Z. K. Li, G. H. Wen, Z. S. Duan, and W. Ren, “Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs,” IEEE Trans. Automatic Control, vol. 60, no. 4, pp. 1152–1157, 2015. doi: 10.1109/TAC.2014.2350391
|
| [5] |
J. L. Wang, Q. Wang, H. N. Wu, and T. Huang, “Finite time consensus and finite-time H∞ consensus of multi-agent systems under directed topology,” IEEE Trans. Network Science and Engineering, vol. 7, no. 3, pp. 1619–1632, 2020. doi: 10.1109/TNSE.2019.2943023
|
| [6] |
Z. K. Li, W. Ren, X. D. Liu, and L. H. Xie, “Distributed consensus of linear multi-agent systems with adaptive dynamic protocols,” Automatica, vol. 49, no. 7, pp. 1986–1995, 2013. doi: 10.1016/j.automatica.2013.03.015
|
| [7] |
X. W. Dong and G. Q. Hu, “Time-varying formation control for general linear multi-agent systems with switching directed topologies,” Automatica, vol. 73, pp. 47–55, 2016. doi: 10.1016/j.automatica.2016.06.024
|
| [8] |
W. Jiang, G. Wen, Z. Peng, T. Huang, and A. Rahmani, “Fully distributed formation-containment control of heterogeneous linear multiagent systems,” IEEE Trans. Automatic Control, vol. 64, no. 9, pp. 3889–3896, 2019. doi: 10.1109/TAC.2018.2887409
|
| [9] |
H. G. Marina, B. Jayawardhana, and M. Cao, “Taming mismatches in inter-agent distances for the formation-motion control of second-order agents,” IEEE Trans. Automatic Control, vol. 63, no. 2, pp. 449–462, 2018. doi: 10.1109/TAC.2017.2715226
|
| [10] |
G. X. Wen, C. L. Chen, H. Dou, H. L. Yang, and C. F. Liu, “Formation control with obstacle avoidance of second-order multi-agent systems under directed communication topology,” Science China Information Sciences, vol. 62, no. 9, pp. 140–153, 2019.
|
| [11] |
T. Nguyen, H. M. La, T. D. Le, and M. Jafari, “Formation control and obstacle avoidance of multiple rectangular agents with limited communication ranges,” IEEE Trans. Control of Network Systems, vol. 4, no. 4, pp. 680–691, 2017. doi: 10.1109/TCNS.2016.2542978
|
| [12] |
J. Hwang, J. Lee, and C. Park, “Collision avoidance control for formation flying of multiple spacecraft using artificial potential field,” Advances in Space Research, vol. 69, no. 5, pp. 2197–2209, 2022. doi: 10.1016/j.asr.2021.12.015
|
| [13] |
J. Wang and M. Xin, “Integrated optimal formation control of multiple unmanned aerial vehicles,” IEEE Trans. Control Systems Technology, vol. 21, no. 5, pp. 1731–1744, 2013. doi: 10.1109/TCST.2012.2218815
|
| [14] |
Z. Q. Shi, J. D. He, T. L. Wang, C. Zhou, and J. Guo, “Optimal formation control and collision avoidance in environment with multiple rectangle obstacles,” J. Franklin Institute, vol. 355, no. 15, pp. 7626–7642, 2018. doi: 10.1016/j.jfranklin.2018.07.042
|
| [15] |
Y. Li, J. Zhang, and S. Tong, “Fuzzy adaptive optimized leader-following formation control for second-order stochastic multiagent systems,” IEEE Trans. Industrial Informatics, vol. 18, no. 9, pp. 6026–6037, 2022. doi: 10.1109/TII.2021.3133927
|
| [16] |
W. W Chai, Synchronization in Complex Networks of Nonlinear Dynamical Systems, Singapore: World Scientific, 2007.
|
Figures(2)






 DownLoad:
DownLoad: