A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 2
Volume 10
Issue 2
IEEE/CAA Journal of Automatica Sinica
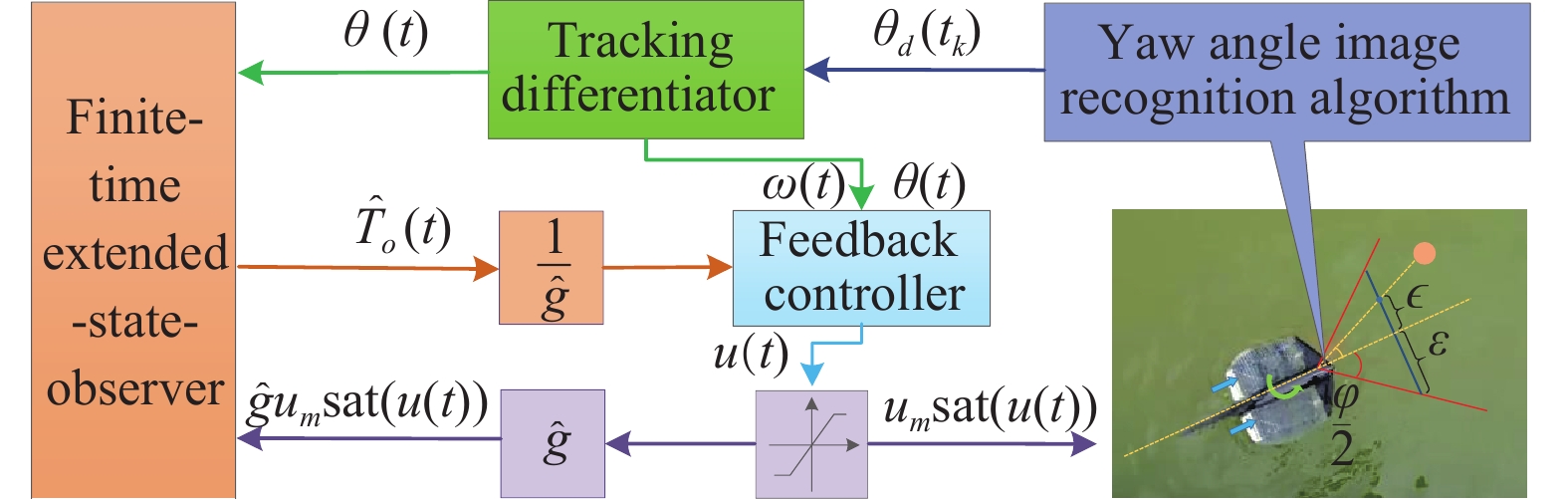
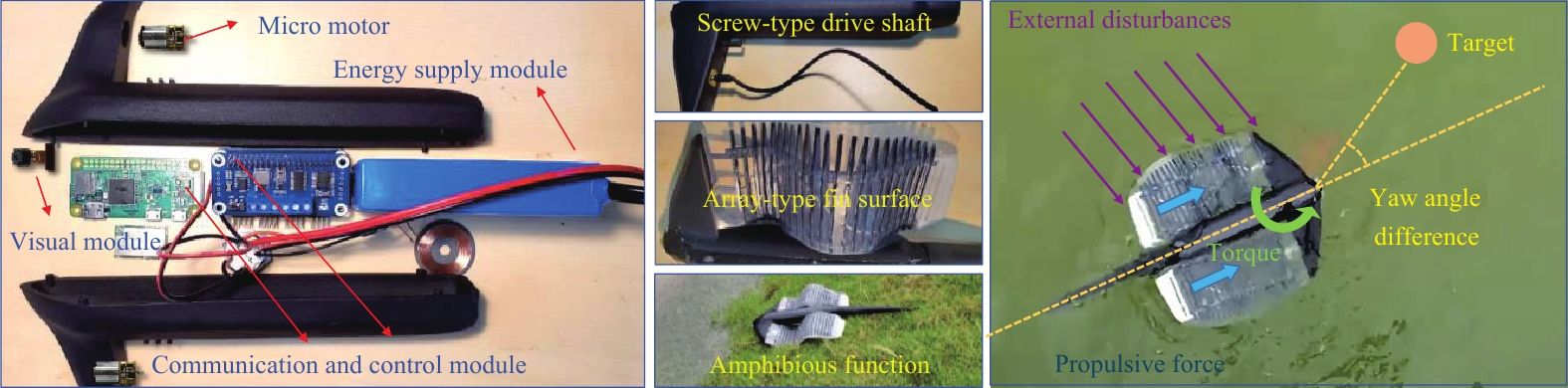
| Citation: | H. Y. Cheng, B. Fang, Q. Liu, J. H. Zhang, and J. Hong, “Visual feedback disturbance rejection control for an amphibious bionic stingray under actuator saturation,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 566–568, Feb. 2023. doi: 10.1109/JAS.2023.123237

|

| [1] |
Z. Zuo, C. Liu, Q.-L. Han, and J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, 2022. doi: 10.1109/JAS.2022.105410
|
| [2] |
Z. Zhou, J. Liu, and J. Yu, “A survey of underwater multi-robot systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 1–18, 2022. doi: 10.1109/JAS.2021.1004269
|
| [3] |
Z. Peng, J. Wang, D. Wang, and Q.-L. Han, “An overview of recent advances in coordinated control of multiple autonomous surface vehicles,” IEEE Trans. Ind. Informat., vol. 17, no. 2, pp. 732–745, 2021. doi: 10.1109/TII.2020.3004343
|
| [4] |
J. Zhu, C. White, D. K. Wainwright, V. D. Santo, G. V. Lauder, and H. Bart-Smith, “Tuna robotics: A high-frequency experimental platform exploring the performance space of swimming fishes,” Sci. Robot., vol. 4, no. 34, p. eaax4615, 2019.
|
| [5] |
S. Arastehfar and C.-M. Chew, “Effects of root chord movement on thrust generation of oscillatory pectoral fins,” Bioinspir. Biomim., vol. 16, no. 3, p. 36009, 2021.
|
| [6] |
Q. Li, J. Zhang, J. Hong, D. Hu, Y. Yang, and S. Guo, “A novel undulatory propulsion strategy for underwater robots,” J. Bionic. Eng., vol. 18, pp. 812–823, 2021. doi: 10.1007/s42235-021-0057-4
|
| [7] |
Z. Peng, D. Wang, and J. Wang, “Data-driven adaptive disturbance observers for model-free trajectory tracking control of maritime autonomous surface ships,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 12, pp. 5584–5594, 2021. doi: 10.1109/TNNLS.2021.3093330
|
| [8] |
J. Zhang, P. Shi, Y. Xia, and H. Yang, “Discrete-time sliding mode control with disturbance rejection,” IEEE Trans. Ind. Electron., vol. 66, no. 10, pp. 7967–7975, 2019. doi: 10.1109/TIE.2018.2879309
|
| [9] |
W.-H. Chen, J. Yang, L. Guo, and S. Li, “Disturbance-observer-based control and related methods−An overview,” IEEE Trans. Ind. Electron., vol. 63, no. 2, pp. 1083–1095, 2016. doi: 10.1109/TIE.2015.2478397
|
| [10] |
J. Han, “From PID to active disturbance rejection control,” IEEE Trans. Ind. Electron., vol. 56, no. 3, pp. 900–906, 2009. doi: 10.1109/TIE.2008.2011621
|
| [11] |
H. Cheng, J. Zhang, Y. Li, and J. Hong, “Finite-time tracking control for a variable stiffness pneumatic soft bionic caudal fin,” Mech. Syst. Signal Proc., vol. 152, p. 107314, 2021.
|
| [12] |
Z. Peng, Y. Jiang, and J. Wang, “Event-triggered dynamic surface control of an underactuated autonomous surface vehicle for target enclosing,” IEEE Trans. Ind. Electron., vol. 68, no. 4, pp. 3402–3412, 2021. doi: 10.1109/TIE.2020.2978713
|
| [13] |
J. Yu, Z. Wu, X. Yang, Y. Yang, and P. Zhang, “Underwater target tracking control of an untethered robotic fish with a camera stabilizer,” IEEE Trans. Syst. Man Cybern. -Syst., vol. 51, no. 10, pp. 6523–6534, 2021. doi: 10.1109/TSMC.2019.2963246
|
| [14] |
Y. Yuan, Z. Wang, Y. Yu, L. Guo, and H. Yang, “Active disturbance rejection control for a pneumatic motion platform subject to actuator saturation: An extended state observer approach,” Automatica, vol. 107, pp. 353–361, 2019. doi: 10.1016/j.automatica.2019.05.056
|
| [15] |
S. Yia, J. Wang, and B. Li, “Composite backstepping control with finite-time convergence,” Optik, vol. 142, pp. 260–272, 2017. doi: 10.1016/j.ijleo.2017.05.070
|
| [16] |
T. Hua, Z. Lin, and B. Chen, “An analysis and design method for linear systems subject to actuator saturation and disturbance,” Automatica, vol. 38, pp. 351–359, 2002. doi: 10.1016/S0005-1098(01)00209-6
|
| [17] |
Y. Liu, H. Li, Z. Zuo, X. Li, and R. Lu, “An overview of finite/fixed-time control and its application in engineering systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 749–762, May 2022. doi: 10.1109/JAS.2022.105413
|
Figures(4)






 DownLoad:
DownLoad: