A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 2
Volume 10
Issue 2
IEEE/CAA Journal of Automatica Sinica
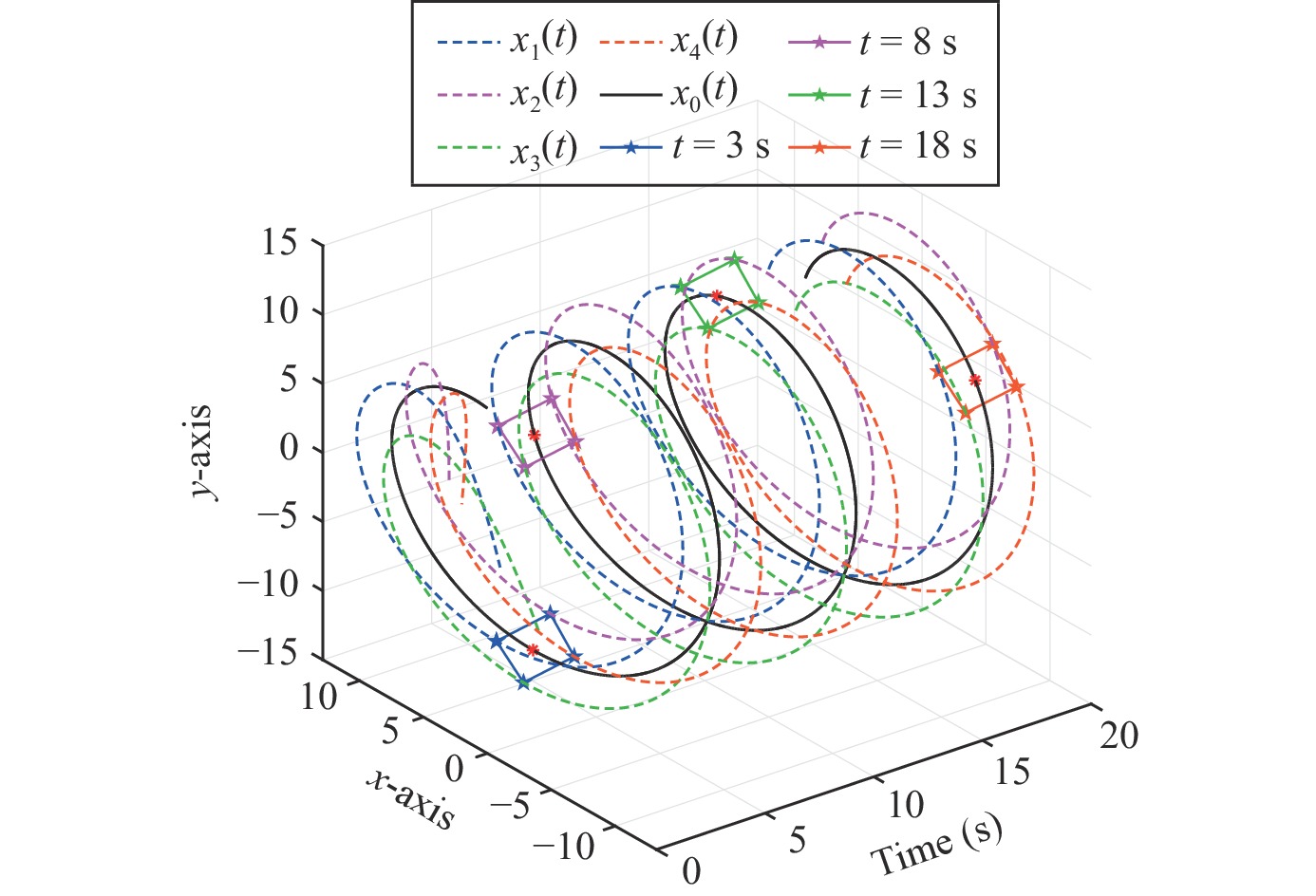
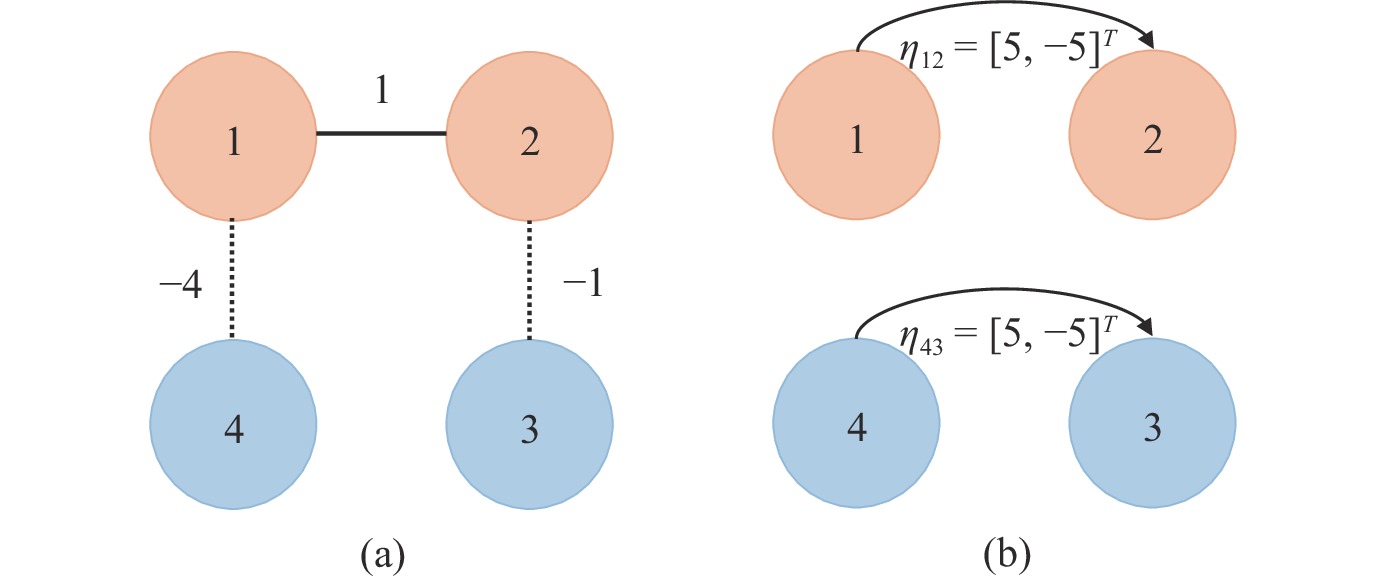
| Citation: | W. H. Li, K. Y. Qin, M. J. Shi, J. L. Shao, and B. X. Lin, “Dynamic target enclosing control scheme for multi-agent systems via a signed graph-based approach,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 560–562, Feb. 2023. doi: 10.1109/JAS.2023.123234

|

| [1] |
Y. Zheng, Q. Zhao, J. Ma, and L. Wang, “Second-order consensus of hybrid multi-agent systems,” Systems &Control Letters, vol. 125, pp. 51–58, 2019.
|
| [2] |
L. Pan, H. Shao, M. Mesbahi, Y. Xi, and D. Li, “Consensus on matrix-weighted switching networks,” IEEE Trans. Automatic Control, vol. 66, no. 12, pp. 5990–5996, 2021. doi: 10.1109/TAC.2021.3063115
|
| [3] |
M. Ye, D. Li, Q.-L. Han, and L. Ding, “Distributed nash equilibrium seeking for general networked games with bounded disturbances,” IEEE/CAA J. Autom. Sinica.
|
| [4] |
K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A survey of multi-agent formation control,” Automatica, vol. 53, pp. 424–440, 2015. doi: 10.1016/j.automatica.2014.10.022
|
| [5] |
Y. Hong, J. Hu, and L. Gao, “Tracking control for multi-agent consensus with an active leader and variable topology,” Automatica, vol. 42, no. 7, pp. 1177–1182, 2006. doi: 10.1016/j.automatica.2006.02.013
|
| [6] |
Z. Meng, W. Ren, and Z. You, “Distributed finite-time attitude containment control for multiple rigid bodies,” Automatica, vol. 46, no. 12, pp. 2092–2099, 2010. doi: 10.1016/j.automatica.2010.09.005
|
| [7] |
Z. Gao and G. Guo, “Fixed-time sliding mode formation control of auvs based on a disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 539–545, 2020. doi: 10.1109/JAS.2020.1003057
|
| [8] |
W. Li, H. Zhang, Y. Zhou, and Y. Wang, “Bipartite formation tracking for multi-agent systems using fully distributed dynamic edge-event-triggered protocol,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 847–853, 2022. doi: 10.1109/JAS.2021.1004377
|
| [9] |
J. Huang, S. Zhou, H. Tu, Y. Yao, and Q. Liu, “Distributed optimization algorithm for multi-robot formation with virtual reference center,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 732–734, 2022. doi: 10.1109/JAS.2022.105473
|
| [10] |
Y. Kobayashi, K. Otsubo, and S. Hosoe, “Design of decentralized capturing behavior by multiple mobile robots,” in Proc. IEEE Workshop on Distributed Intelligent Systems: Collective Intelligence and Its Applications, 2006, pp. 13–18.
|
| [11] |
F. Chen, W. Ren, and Y. Cao, “Surrounding control in cooperative agent networks,” Systems &Control Letters, vol. 59, no. 11, pp. 704–712, 2010.
|
| [12] |
Z. Chen, “A cooperative target-fencing protocol of multiple vehicles,” Automatica, vol. 107, pp. 591–594, 2019. doi: 10.1016/j.automatica.2019.05.034
|
| [13] |
B. Hu, H. Zhang, B. Liu, H. Meng, and G. Chen, “Distributed surrounding control of multiple unmanned surface vessels with varying interconnection topologies,” IEEE Trans. Control Systems Technology, vol. 30, no. 1, pp. 400–407, Jan. 2022. doi: 10.1109/TCST.2021.3057640
|
| [14] |
C. Altafini, “Consensus problems on networks with antagonistic interactions,” IEEE Trans. Automatic Control, vol. 58, no. 4, pp. 935–946, 2012.
|
| [15] |
J. Wu, Y. Zhu, Y. Zheng, and H. Wang, “Resilient bipartite consensus of second-order multiagent systems with event-triggered communication,” IEEE Systems J., 2021, DOI: 10.1109/JSYST.2021.3132623.
|
| [16] |
L. Shi, W. X. Zheng, J. Shao, and Y. Cheng, “Sub-super-stochastic matrix with applications to bipartite tracking control over signed networks,” SIAM J. Control and Optimization, vol. 59, no. 6, pp. 4563–4589, 2021. doi: 10.1137/19M1239982
|
| [17] |
J. Shao, W. X. Zheng, L. Shi, and Y. Cheng, “Bipartite tracking consensus of generic linear agents with discrete-time dynamics over cooperation-competition networks,” IEEE Trans. Cybernetics, vol. 51, no. 11, pp. 5225–5235, 2020.
|
Figures(2)






 DownLoad:
DownLoad: