A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 2
Volume 10
Issue 2
IEEE/CAA Journal of Automatica Sinica
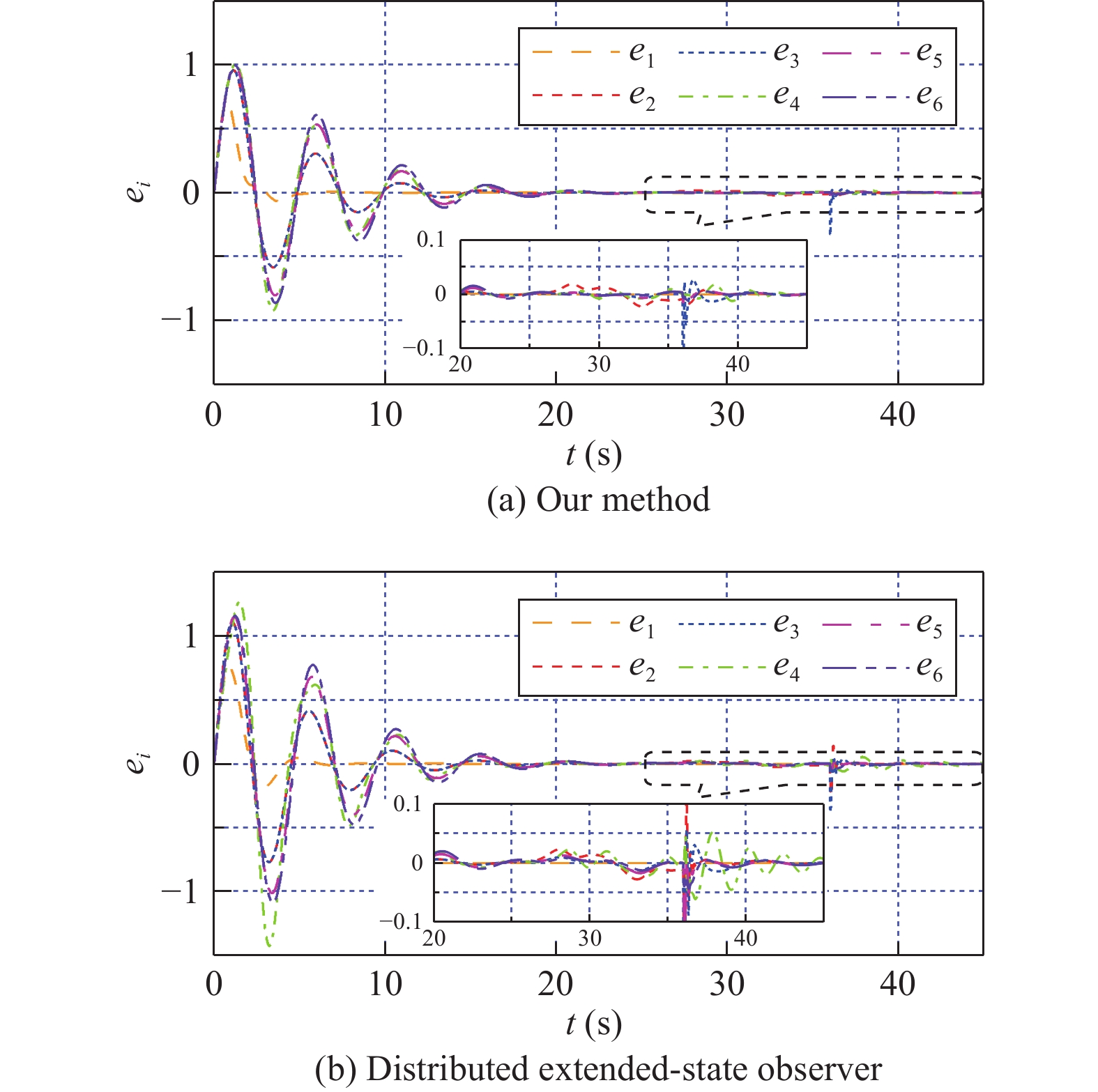
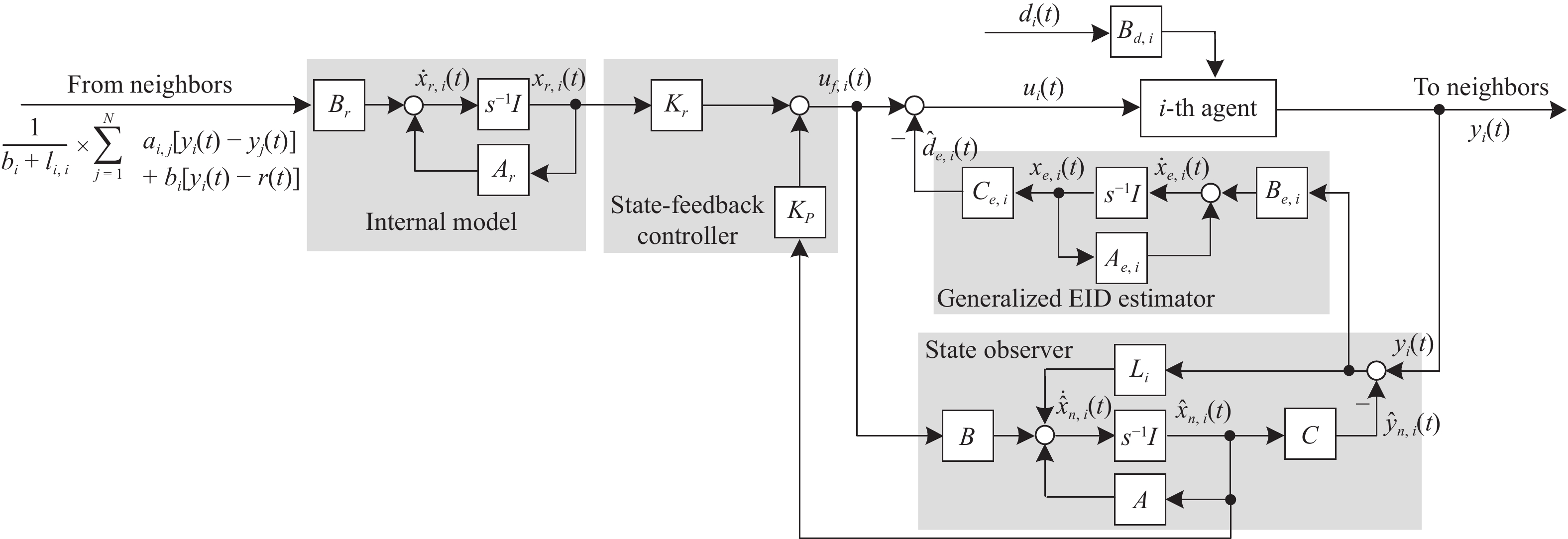
| Citation: | P. Yu, K.-Z. Liu, X. D. Liu, X. L. Li, M. Wu, and J. She, “Robust consensus tracking control of uncertain multi-agent systems with local disturbance rejection,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 427–438, Feb. 2023. doi: 10.1109/JAS.2023.123231

|

| [1] |
R. W. Beard, T. W. McLain, M. A. Goodrich, and E. Anderson, “Coordinated target assignment and intercept for unmanned air vehicles,” IEEE Trans. Robot. Autom., vol. 18, no. 6, pp. 911–922, Dec. 2002. doi: 10.1109/TRA.2002.805653
|
| [2] |
J. R. Carpenter, “Decentralized control of satellite formations,” Int. J. Robust Nonlinear Control, vol. 12, no. 2/3, pp. 141–161, Feb./Mar. 2002.
|
| [3] |
Z. Li, Z. Duan, G. Chen, and L. Huang, “Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint,” IEEE Trans. Circuits Syst. I, vol. 57, no. 1, pp. 213–224, 2010. doi: 10.1109/TCSI.2009.2023937
|
| [4] |
X. Li, Y. C. Soh, and L. Xie, “Output-feedback protocols without controller interaction for consensus of homogeneous multi-agent systems: A unified robust control view,” Automatica, vol. 81, pp. 37–45, 2017. doi: 10.1016/j.automatica.2017.03.001
|
| [5] |
Q. Wei, X. Wang, X. Zhong, and N. Wu, “Consensus control of leader-following multi-agent systems in directed topology with heterogeneous disturbances,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 423–431, Feb. 2021. doi: 10.1109/JAS.2021.1003838
|
| [6] |
A. Elahi, A. Alfi, and H. Modares, “H∞ consensus control of discrete-time multi-agent systems under network imperfections and external disturbance,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 3, pp. 667–675, May 2019. doi: 10.1109/JAS.2019.1911474
|
| [7] |
Y. Z. Lv, Z. K. Li, and Z. S. Duan, “Distributed PI control for consensus of heterogeneous multiagent systems over directed graphs,” IEEE Trans. Syst. Man Cybern. Syst., vol. 50, no. 4, pp. 1602–1609, Apr. 2020. doi: 10.1109/TSMC.2018.2792472
|
| [8] |
Q. Wang, Z. Duan, and J. Wang, “Distributed optimal consensus control algorithm for continuous-time multi-agent systems,” IEEE Trans. Circuits Syst. Ⅱ-Express Briefs, vol. 67, no. 1, pp. 102–106, Jan. 2020. doi: 10.1109/TCSII.2019.2900758
|
| [9] |
H. Zhang, J. Han, Y. Wang, and H. Jiang, “H∞ consensus for linear heterogeneous discrete-time multiagent systems with output feedback control,” IEEE Trans. Cybern., vol. 49, no. 10, pp. 3713–3721, Oct. 2019. doi: 10.1109/TCYB.2018.2849361
|
| [10] |
K.-Z. Liu and Y. Yao, Robust Control: Theory and Applications. Hoboken, NJ, USA: Wiley, 2016.
|
| [11] |
M. Guo, D. Xu, and L. Liu, “Design of cooperative output regulators for heterogeneous uncertain nonlinear multiagent systems,” IEEE Trans. Cybern., vol. 52, no. 6, pp. 5174–5183, 2022.
|
| [12] |
Y. Hua, X. Dong, Q. Li, and Z. Ren, “Distributed time-varying formation robust tracking for general linear multiagent systems with parameter uncertainties and external disturbances,” IEEE Trans. Cybern., vol. 47, no. 8, pp. 1959–1969, Aug. 2017. doi: 10.1109/TCYB.2017.2701889
|
| [13] |
J. Huang, Nonlinear Output Regulation: Theory and Applications. Philadelphia, PA, USA: SIAM, 2004.
|
| [14] |
X. Wang, Y. Hong, J. Huang, and Z.-P. Jiang, “A distributed control approach to a robust output regulation problem for multi-agent linear systems,” IEEE Trans. Automat. Control, vol. 55, no. 12, pp. 2891–2895, Dec. 2010. doi: 10.1109/TAC.2010.2076250
|
| [15] |
Y. Su, Y. Hong, and J. Huang, “A general result on the robust cooperative output regulation for linear uncertain multi-agent systems,” IEEE Trans. Automat. Control, vol. 58, no. 5, pp. 1275–1279, May 2013. doi: 10.1109/TAC.2012.2229837
|
| [16] |
H. L. Trentelman, K. Takaba, and N. Monshizadeh, “Robust synchronization of uncertain linear multi-agent systems,” IEEE Trans. Autom. Control, vol. 58, no. 6, pp. 1511–1523, Jun. 2013. doi: 10.1109/TAC.2013.2239011
|
| [17] |
X. Li, Y. C. Soh, and L. Xie, “Design of output-feedback protocols for robust consensus of uncertain linear multi-agent systems,”in Proc. Amer. Control Conf., Seattle, WA, USA, 2017, pp. 936–941.
|
| [18] |
W. H. Chen, J. Yang, L. Guo, and S. Li, “Disturbance observer-based control and related methods: An overview,” IEEE Trans. Ind. Electron., vol. 63, no. 2, pp. 1083–1095, Feb. 2016. doi: 10.1109/TIE.2015.2478397
|
| [19] |
K. Liu, Y. Chen, Z. Duan, and J. Lu, “Cooperative output regulation of LTI plant via distributed observers with local measurement,” IEEE Trans. Cybern., vol. 48, no. 7, pp. 2181–2191, Jul. 2018. doi: 10.1109/TCYB.2017.2728812
|
| [20] |
X. Li, Y. C. Soh, L. Xie, and F. L. Lewis, “Cooperative output regulation of heterogeneous linear multi-agent networks via H∞ performance allocation,” IEEE Trans. Automat. Control, vol. 64, no. 2, pp. 683–696, Feb. 2019.
|
| [21] |
Y. Huo, Y. Lv, X. Wu, and Z. Duan, “Fully distributed consensus for general linear multi-agent systems with unknown external disturbances,” IET Contr. Theory Appl., vol. 13, no. 16, pp. 2595–2609, Oct. 2019. doi: 10.1049/iet-cta.2018.6457
|
| [22] |
G. Li, X. Wang, S. Li, W. X. Zheng, and X. Chen, “Finite-time output consensus of second-order multi-agent systems with mismatched disturbances via active anti-disturbance control,”in Proc. 11th Asian Control Conf., Gold Coast, QLD, 2017, pp. 2042–2047.
|
| [23] |
Q. Wang and C. Sun, “Distributed asymptotic consensus in directed networks of nonaffine systems with nonvanishing disturbance,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 6, pp. 1133–1140, Jun. 2021. doi: 10.1109/JAS.2021.1004021
|
| [24] |
J. She, M. Fang, Q. Ohyama, H. Hashimoto, and M. Wu, “Improving disturbance-rejection performance based on an equivalent-input-disturbance approach,” IEEE Trans. Ind. Electron., vol. 55, no. 1, pp. 380–389, Jan. 2008. doi: 10.1109/TIE.2007.905976
|
| [25] |
Y u, K. Liu, X. Liu, X. Li, J. She, and M. Wu, “Analysis of equivalent-input-disturbance-based control systems and a coordinated design algorithm for uncertain systems,” Int. J. Robust Nonlinear Control, vol. 31, no. 5, pp. 1755–1773, Jan. 2021. doi: 10.1002/rnc.5375
|
| [26] |
K. M. Zhou, J. C. Doyle, and K. Glover, Robust and Optimal Control. Englewood Cliffs, NJ, USA: Prentice-Hall, 1996.
|
| [27] |
Z. Ding, “Consensus disturbance rejection with disturbance observers,” IEEE Trans. Ind. Electron., vol. 62, no. 9, pp. 5829–5837, Sep. 2015. doi: 10.1109/TIE.2015.2442218
|
| [28] |
X. Wang, G. Wang, and S. Li, “Distributed finite-time optimization for integrator chain multiagent systems with disturbances,” IEEE Trans. Autom. Control, vol. 65, no. 12, pp. 5296–5311, Dec. 2020. doi: 10.1109/TAC.2020.2979274
|
| [29] |
X. Wang, S. Li, and G. Wang, “Distributed optimization for disturbed second-order multiagent systems based on active anti-disturbance control,” IEEE Trans. Neural Netw. Learn. Syst., vol. 31, no. 6, pp. 2104–2117, Jun. 2020. doi: 10.1109/TNNLS.2019.2951790
|
| [30] |
B. A. Francis, “The linear multivariable regulator problem,” SIAM J. Control Optimiz., vol. 15, no. 3, pp. 486–505, 1977. doi: 10.1137/0315033
|
| [31] |
Q. Shen, B. Jiang, P. Shi, and J. Zhao, “Cooperative adaptive fuzzy tracking control for networked unknown nonlinear multiagent systems with time-varying actuator faults,” IEEE Trans. Fuzzy Syst., vol. 22, no. 3, pp. 494–504, Jun. 2014. doi: 10.1109/TFUZZ.2013.2260757
|
| [32] |
F. Yaghmaie, F. Lewis, and R. Su, “Output regulation of linear heterogeneous multi-agent systems via output and state feedback,” Automatica, vol. 67, pp. 157–164, 2016. doi: 10.1016/j.automatica.2016.01.040
|
| [33] |
S. Skogestad and I. Postlethwaite, Multivariable Feedback Control. Hoboken, NJ, USA: Wiley, 2001.
|
| [34] |
J. Gu, et al., “Design and flight testing evaluation of formation control laws,” IEEE Trans. Control Syst. Technol., vol. 14, no. 6, pp. 1105–1112, Nov. 2006. doi: 10.1109/TCST.2006.880203
|
| [35] |
Y. Liu, D. Yao, H. Li, and R. Lu, “Distributed cooperative compound tracking control for a platoon of vehicles with adaptive NN,” IEEE Trans. Cybern., vol. 52, no. 7, pp. 7039–7048, 2022.
|
| [36] |
Y. Liu, H. Li, Z. Zuo, X. Li, and R. Lu, “An overview of finite/fixed-time control and its application in engineering systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 12, pp. 2106–2120, 2022.
|
Figures(6)






 DownLoad:
DownLoad: