A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 2
Volume 10
Issue 2
IEEE/CAA Journal of Automatica Sinica
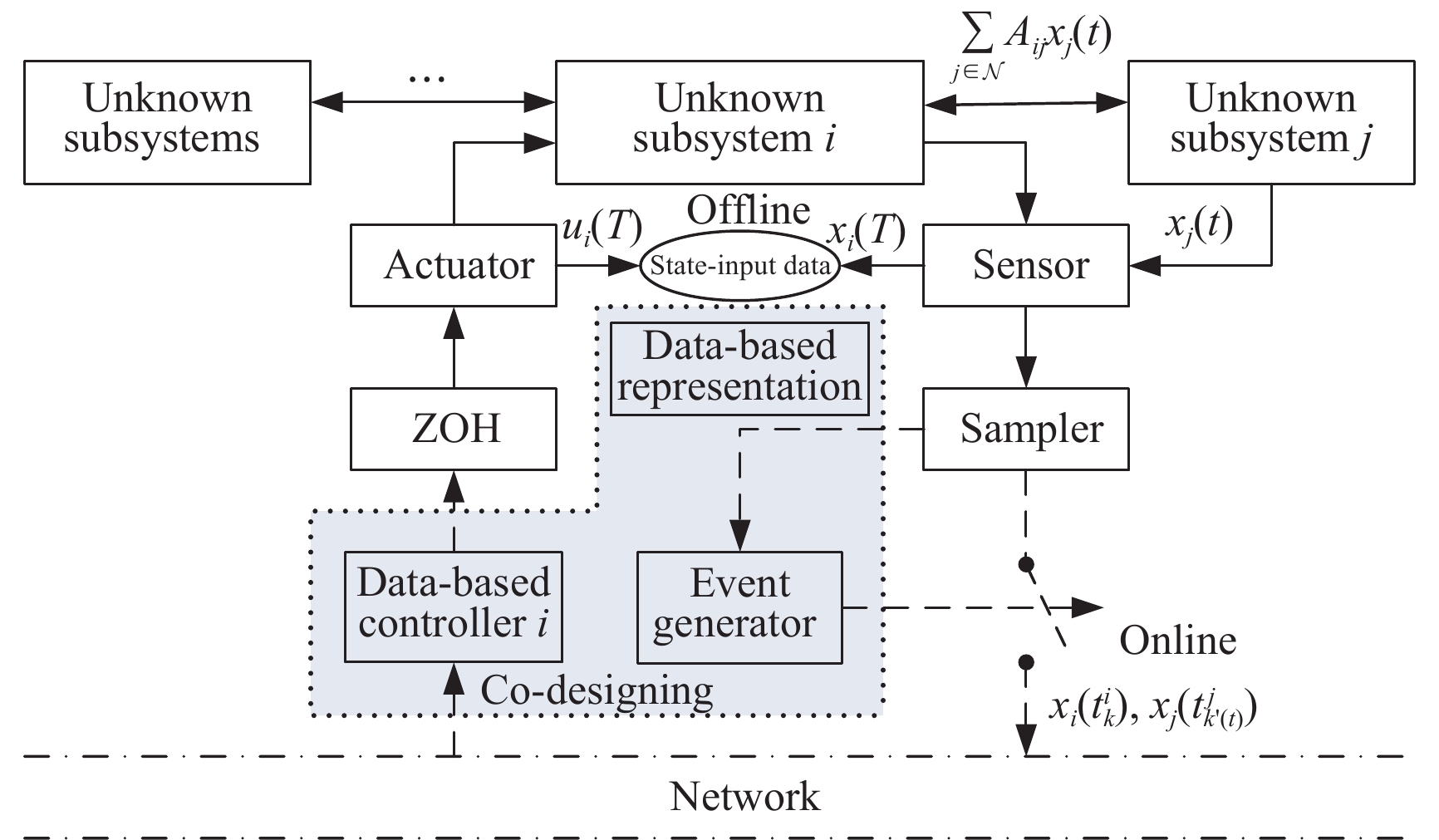
| Citation: | X. Wang, J. Sun, G. Wang, F. Allgöwer, and J. Chen, “Data-driven control of distributed event-triggered network systems,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 351–364, Feb. 2023. doi: 10.1109/JAS.2023.123225

|

| [1] |
D. V. Dimarogonas, E. Frazzoli, and K. H. Johansson, “Distributed event-triggered control for multi-agent systems,” IEEE Trans. Autom. Control, vol. 57, no. 5, pp. 1291–1297, May 2012. doi: 10.1109/TAC.2011.2174666
|
| [2] |
G. H. Lin, H. Y. Li, H. Ma, D. Y. Yao, and R. Q. Lu, “Human-in-the-loop consensus control for nonlinear multi-agent systems with actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 111–122, Jan. 2022. doi: 10.1109/JAS.2020.1003596
|
| [3] |
K. Bansal and P. Mukhija, “Aperiodic sampled-data control of distributed networked control systems under stochastic cyber-attacks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1064–1073, Jul. 2020. doi: 10.1109/JAS.2020.1003249
|
| [4] |
J. Chen, J. Sun, and G. Wang, “From unmanned systems to autonomous intelligent systems,” Engineering, vol. 12, no. 5, pp. 16–19, 2022.
|
| [5] |
Y. L. Ding, B. Xin, and J. Chen, “A review of recent advances in coordination between unmanned aerial and ground vehicles,” Unmanned Syst., vol. 9, no. 2, pp. 97–117, Apr. 2021. doi: 10.1142/S2301385021500084
|
| [6] |
X. Wang, J. Sun, G. Wang, and L. Dou, “Improved stability conditions for time-varying delay systems via relaxed Lyapunov functionals,” Int. J. Control, 2022. [Online]. Available: http://dx.doi.org/10.1080/00207179.2022.2056716.
|
| [7] |
W. P. Heemels, K. H. Johansson, and P. Tabuada, “An introduction to event-triggered and self-triggered control,” in Proc. 51st IEEE Conf. Decision and Control. Maui, USA, 2012, pp. 3270–3285.
|
| [8] |
I. Ahmad, X. H. Ge, and Q.-L. Han, “Decentralized dynamic event-triggered communication and active suspension control of in-wheel motor driven electric vehicles with dynamic damping,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 971–986, Apr. 2021. doi: 10.1109/JAS.2021.1003967
|
| [9] |
M. C. F. Donkers and W. P. M. H. Heemels, “Output-based event-triggered control with guaranteed
|
| [10] |
Z. Y. Chen, Q.-L. Han, Y. M. Yan, and Z.-G. Wu, “How often should one update control and estimation: Review of networked triggering techniques,” Sci. China Inf. Sci., vol. 63, no. 5, pp. 2–19, May 2020.
|
| [11] |
Y. Chen, M. Z. Zhu, R. Q. Lu, and A. K. Xue, “Distributed H∞ filtering of nonlinear systems with random topology by an event-triggered protocol,” Sci. China Inf. Sci., vol. 64, no. 10, pp. 202–216, Oct. 2021.
|
| [12] |
X. Wang, J. Sun, G. Wang, and L. H. Dou, “A mixed switching event-triggered transmission scheme for networked control systems,” IEEE Trans. Control Netw. Syst., vol. 9, no. 1, pp. 390–402, Mar. 2022. doi: 10.1109/TCNS.2021.3106447
|
| [13] |
X. Wang and M. D. Lemmon, “Event-triggering in distributed networked control systems,” IEEE Trans. Autom. Control, vol. 56, no. 3, pp. 586–601, Jul. 2011. doi: 10.1109/TAC.2010.2057951
|
| [14] |
Z. X. Wang, M. R. Fei, D. J. Du, and M. Zheng, “Decentralized event-triggered average consensus for multi-agent systems in CPSs with communication constraints,” IEEE/CAA J. Autom. Sinica, vol. 2, no. 3, pp. 248–257, Jul. 2015. doi: 10.1109/JAS.2015.7152658
|
| [15] |
T. Shi, T. T. Tang, and J. J. Bai, “Distributed event-triggered control co-design for large-scale systems via static output feedback,” J. Frankl. Inst., vol. 356, no. 17, pp. 10393–10404, Nov. 2019. doi: 10.1016/j.jfranklin.2018.05.051
|
| [16] |
C. Deng, W. W. Che, and Z. G. Wu, “A dynamic periodic event-triggered approach to consensus of heterogeneous linear multiagent systems with time-varying communication delays,” IEEE Trans. Cybern., vol. 51, no. 4, pp. 1812–1821, Sept. 2021. doi: 10.1109/TCYB.2020.3015746
|
| [17] |
G. Guo, L. Ding, and Q.-L. Han, “A distributed event-triggered transmission strategy for sampled-data consensus of multi-agent systems,” Automatica, vol. 50, no. 5, pp. 1489–1496, May 2014. doi: 10.1016/j.automatica.2014.03.017
|
| [18] |
K. J. Åström and B. Wittenmark, “On self-tuning regulators,” Automatica, vol. 9, no. 2, pp. 185–199, Mar. 1973. doi: 10.1016/0005-1098(73)90073-3
|
| [19] |
Z. S. Hou and Z. Wang, “From model-based control to data-driven control: Survey, classification and perspective,” IEEE Trans. Ind. Inform., vol. 235, pp. 3–35, Jun. 2013.
|
| [20] |
I. Markovsky and F. Dörfler, “Behavioral systems theory in data-driven analysis, signal processing, and control,” Annu. Rev. Control, vol. 52, pp. 42–64, Jan. 2021. doi: 10.1016/j.arcontrol.2021.09.005
|
| [21] |
L. Ren, T. Wang, Y. J. Laili, and L. Zhang, “A data-driven self-supervised LSTM-DeepFM model for industrial soft sensor,” IEEE Trans. Ind. Inf., vol. 18, no. 9, pp. 5859–5869, Sept. 2022. doi: 10.1109/TII.2021.3131471.
|
| [22] |
J. Eising and J. Cortés, “Informativity for centralized design of distributed controllers for networked systems,” arXiv: 2207.14770, Jul. 2022.
|
| [23] |
H. J. van Waarde, M. K. Camlibel, and M. Mesbahi, “From noisy data to feedback controllers: Nonconservative design via a matrix S-lemma,” IEEE Trans. Autom. Control, vol. 67, no. 1, pp. 162–175, Jan. 2022. doi: 10.1109/TAC.2020.3047577
|
| [24] |
E. Fridman, “A refined input delay approach to sampled-data control,” Automatica, vol. 46, no. 2, pp. 421–427, Feb. 2010. doi: 10.1016/j.automatica.2009.11.017
|
| [25] |
J. Berberich, S. Wildhagen, M. Hertneck, and F. Allgöwer, “Data-driven analysis and control of continuous-time systems under aperiodic sampling,” IFAC-PapersOnLine, vol. 54, no. 7, pp. 210–215, Jul. 2021. doi: 10.1016/j.ifacol.2021.08.360
|
| [26] |
S. Wildhagen, J. Berberich, M. Hertneck, and F. Allgöwer, “Data-driven analysis and controller design for discrete-time systems under aperiodic sampling,” IEEE Trans. Autom. Control, pp. 1–16, Jun. 2022. DOI: 10.1109/TAC.2022.3183969
|
| [27] |
W. Liu, J. Sun, G. Wang, F. Bullo, and J. Chen, “Data-driven resilient predictive control under denial-of-service,” IEEE Trans. Autom. Control, pp. 1–13, 2022. [Online]. Available: https://dx.doi.org/10.1109/TAC.2022.3209399.
|
| [28] |
X. Wang, J. Sun, J. Berberich, G. Wang, F. Allgöwer, and J. Chen, “Data-driven control of dynamic event-triggered systems with delays,” Int. J. Robust Nonlin. Control, pp. 1–20, 2022. [Online]. Available: https://arxiv.org/abs/2110.12768.
|
| [29] |
X. Wang, J. Berberich, J. Sun, G. Wang, F. Allgöwer, and J. Chen, “Model-based and data-driven control of event- and self-triggered discrete-time LTI systems”. IEEE Trans. Cybern, pp. 1–14, 2022. [Online]. Available: https://arxiv.org/abs/2202.08019
|
| [30] |
A. Seuret, “A novel stability analysis of linear systems under asynchronous samplings,” Automatica, vol. 48, no. 1, pp. 177–182, Jan. 2012. doi: 10.1016/j.automatica.2011.09.033
|
| [31] |
Y. P. Guan, G. N. Ping, W. X. Zheng, and H. J. Yao, “Distributed event-triggered scheduling in networked interconnected systems with sparse connections,” Neurocomputing, vol. 400, pp. 420–428, Aug. 2020. doi: 10.1016/j.neucom.2019.04.080
|
| [32] |
C. Nowzari, E. Garcia, and J. Cortés, “Event-triggered communication and control of networked systems for multi-agent consensus,” Automatica, vol. 105, pp. 1–27, 2019. doi: 10.1016/j.automatica.2019.03.009
|
| [33] |
C. De Persis and P. Tesi, “Formulas for data-driven control: Stabilization, optimality, and robustness,” IEEE Trans. Autom. Control, vol. 65, no. 3, pp. 909–924, Mar. 2020. doi: 10.1109/TAC.2019.2959924
|
| [34] |
A. Girard, “Dynamic triggering mechanisms for event-triggered control,” IEEE Trans. Autom. Control, vol. 60, no. 7, pp. 1992–1997, Jul. 2015. doi: 10.1109/TAC.2014.2366855
|
| [35] |
R. K. Mishra and H. Ishii, “Dynamic event-triggered consensus control of discrete-time linear multi-agent systems,” IFAC-PapersOnLine, vol. 54, no. 17, pp. 123–128, Sept. 2021. doi: 10.1016/j.ifacol.2021.11.036
|
| [36] |
J. Chen, S. Y. Xu, X. L. Jia, and B. Y. Zhang, “Novel summation inequalities and their applications to stability analysis for systems with time-varying delay,” IEEE Trans. Autom. Control, vol. 62, no. 5, pp. 2470–2475, Sept. 2017. doi: 10.1109/TAC.2016.2606902
|
| [37] |
X. Wang, J. Sun, and L. Dou, “Improved results on stability analysis of sampled-data systems,” Int. J. Robust Nonlin. Control, vol. 31, no. 14, pp. 6549–6561, Sept. 2021. doi: 10.1002/rnc.5633
|
| [38] |
C. W. Scherer, “LPV control and full block multipliers,” Automatica, vol. 37, no. 3, pp. 361–375, Mar. 2001. doi: 10.1016/S0005-1098(00)00176-X
|
| [39] |
J. Park and P. Park, “An extended looped-functional for stability analysis of sampled-data systems,” Int. J. Robust Nonlin. Control, vol. 30, no. 18, pp. 7962–7969, Dec. 2020. doi: 10.1002/rnc.5221
|
| [40] |
J. Berberich, C. W. Scherer, and F. Allgöwer, “Combining prior knowledge and data for robust controller design,” arXiv: 2009.05253, Sept. 2020.
|
| [41] |
J. F. Sturm, “Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones,” Optim. Methods Softw., vol. 11, no. 1, pp. 625–653, Mar. 1999.
|
Figures(8) / Tables(2)







 DownLoad:
DownLoad: