A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 7
Volume 9
Issue 7
IEEE/CAA Journal of Automatica Sinica
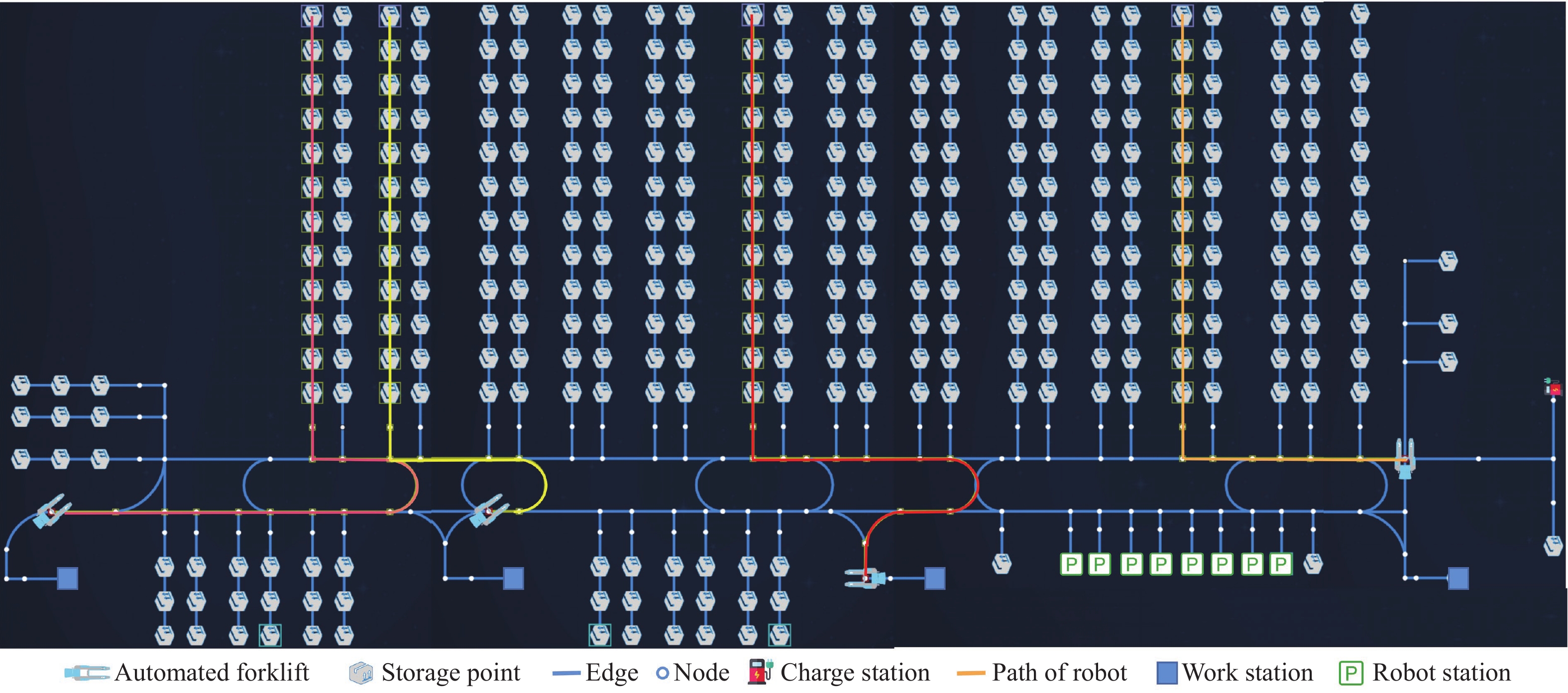
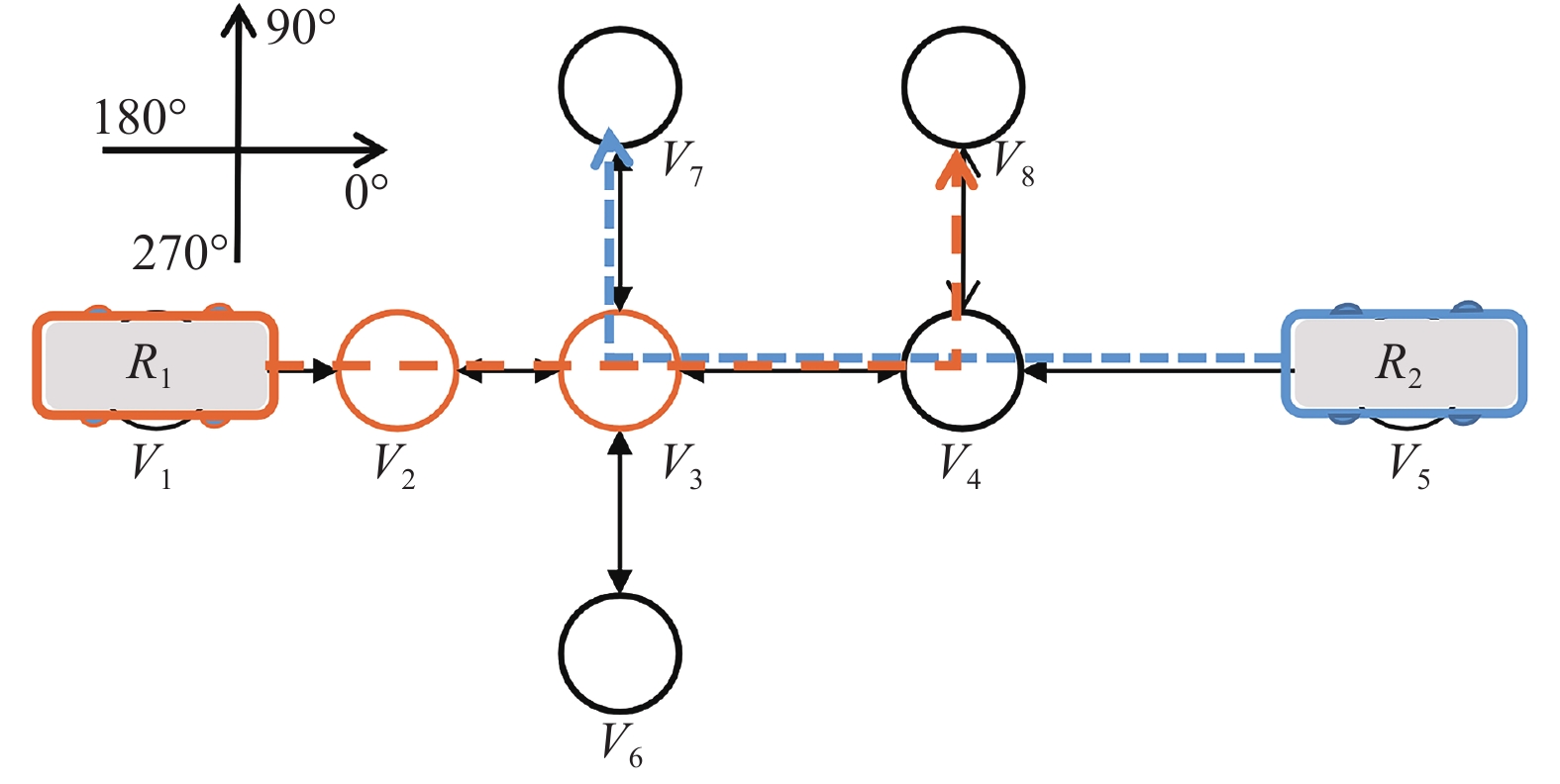
| Citation: | Z. C. Xing, X. Y. Chen, X. K. Wang, W. M. Wu, and R. F. Hu, “Collision and deadlock avoidance in multi-robot systems based on glued nodes,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 7, pp. 1327–1330, Jul. 2022. doi: 10.1109/JAS.2022.105710

|

| [1] |
L. Kalinovcic, T. Petrovic, S. Bogdan, and V. Bobanac, “Modified banker’s algorithm for scheduling in multi-AGV systems,” in Proc. IEEE Int. Conf. Automation Science and Engineering, 2011, pp. 351–356.
|
| [2] |
Y. Zhou, H. Hu, Y. Liu, S.-W. Lin, and Z. Ding, “A distributed method to avoid higher-order deadlocks in multi-robot systems,” Automatica, vol. 112, p. 108706, 2020.
|
| [3] |
J. Zajac and W. Malopolski, “Structural on-line control policy for collision and deadlock resolution in multi-AGV systems,” J. Manufacturing Systems, vol. 60, pp. 80–92, 2021. doi: 10.1016/j.jmsy.2021.05.002
|
| [4] |
W. Malopolski, “A sustainable and conflict-free operation of AGVs in a square topology,” Computers &Industrial Engineering, vol. 126, pp. 472–481, 2018.
|
| [5] |
Y. Zhao, X. Liu, S. Wu, and W. Gang, “Spare zone based hierarchical motion coordination for multi-AGV systems,” Simulation Modelling Practice and Theory, vol. 109, p. 102294, 2021.
|
| [6] |
C. Zu, C. Yang, J. Wang, W. Gao, D. Cao, and F.-Y. Wang, “Simulation and field testing of multiple vehicles collision avoidance algorithms,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1045–1063, 2020.
|
| [7] |
X. Wang, M. Kloetzer, C. Mahulea, and M. Silva, “Collision avoidance of mobile robots by using initial time delays,” in Proc. 54th IEEE Conf. Decision and Control, 2015, pp. 324–329.
|
| [8] |
J. Luo, Y. Wan, W. Wu, and Z. Li, “Optimal petri-net controller for avoiding collisions in a class of automated guided vehicle systems,” IEEE Trans. Intelligent Transportation Systems, vol. 21, no. 11, pp. 4526–4537, 2020. doi: 10.1109/TITS.2019.2937058
|
| [9] |
E. Coffman, M. Elphick, and A. Shoshani, “System deadlocks,” ACM Computing Surveys (CSUR)
|
| [10] |
R. Tarjan, “Depth-first search and linear graph algorithms,” SIAM Journal on Computing, vol. 1, no. 2, pp. 146–160, 1972. doi: 10.1137/0201010
|
 JAS-2022-0280-supp.pdf
JAS-2022-0280-supp.pdf
|

|
Figures(2) / Tables(2)






 DownLoad:
DownLoad: