A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 7
Volume 9
Issue 7
IEEE/CAA Journal of Automatica Sinica
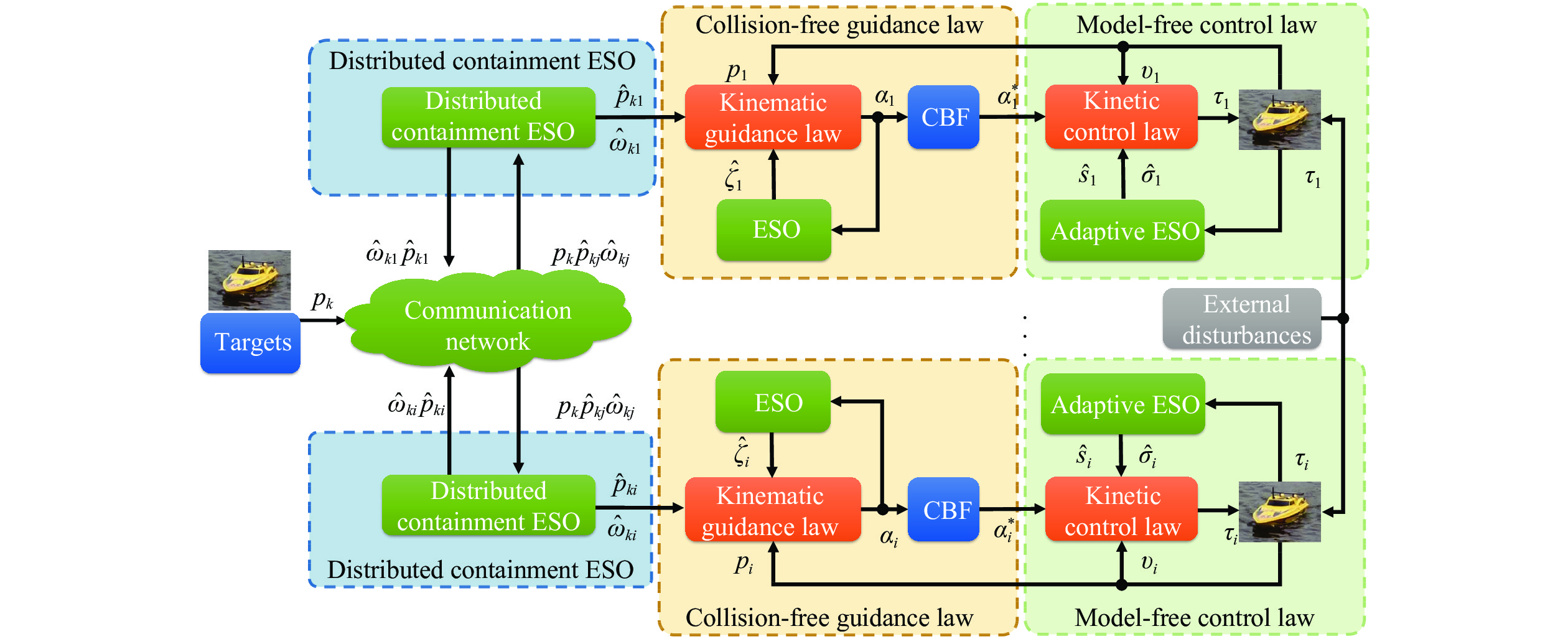
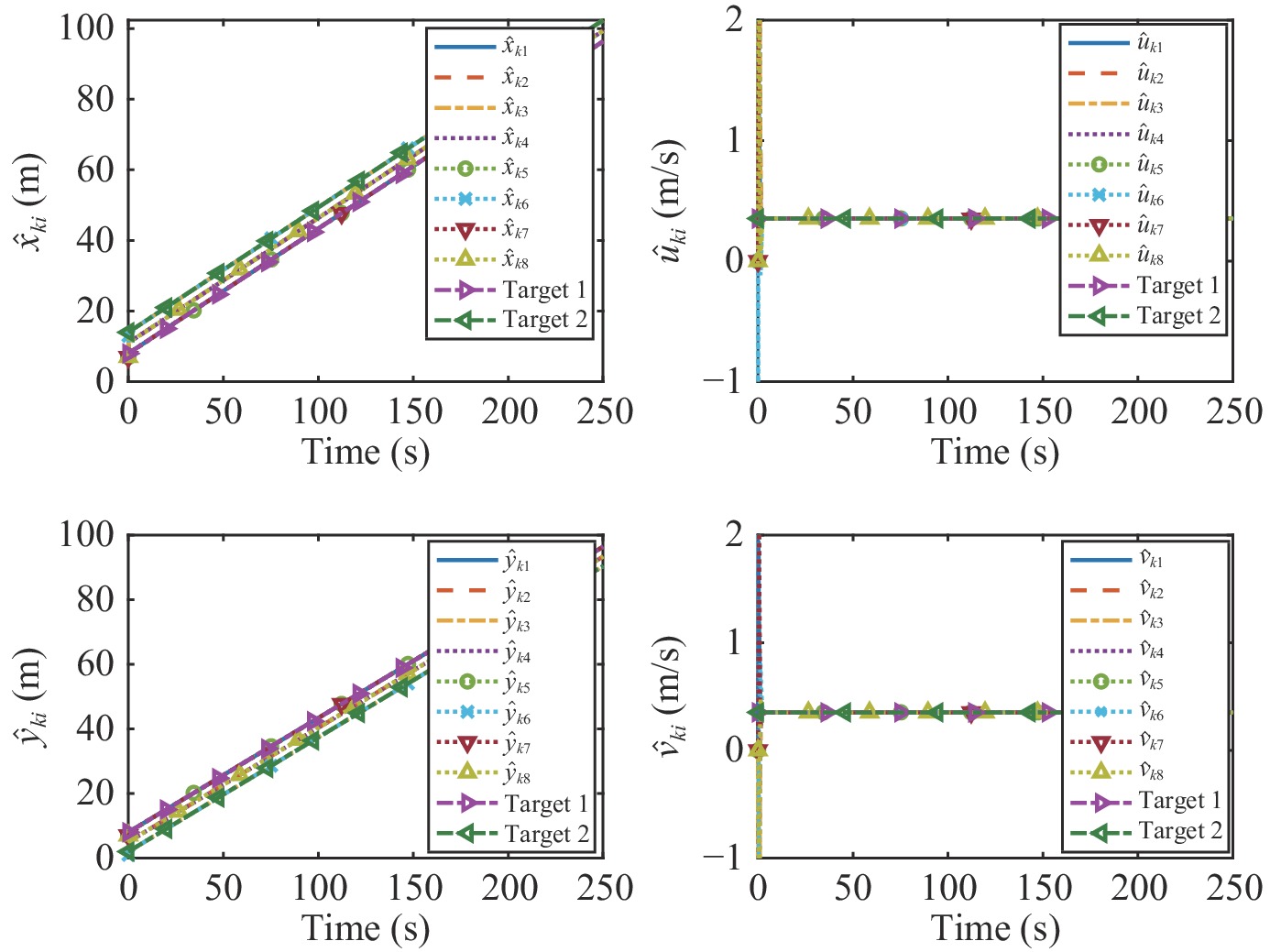
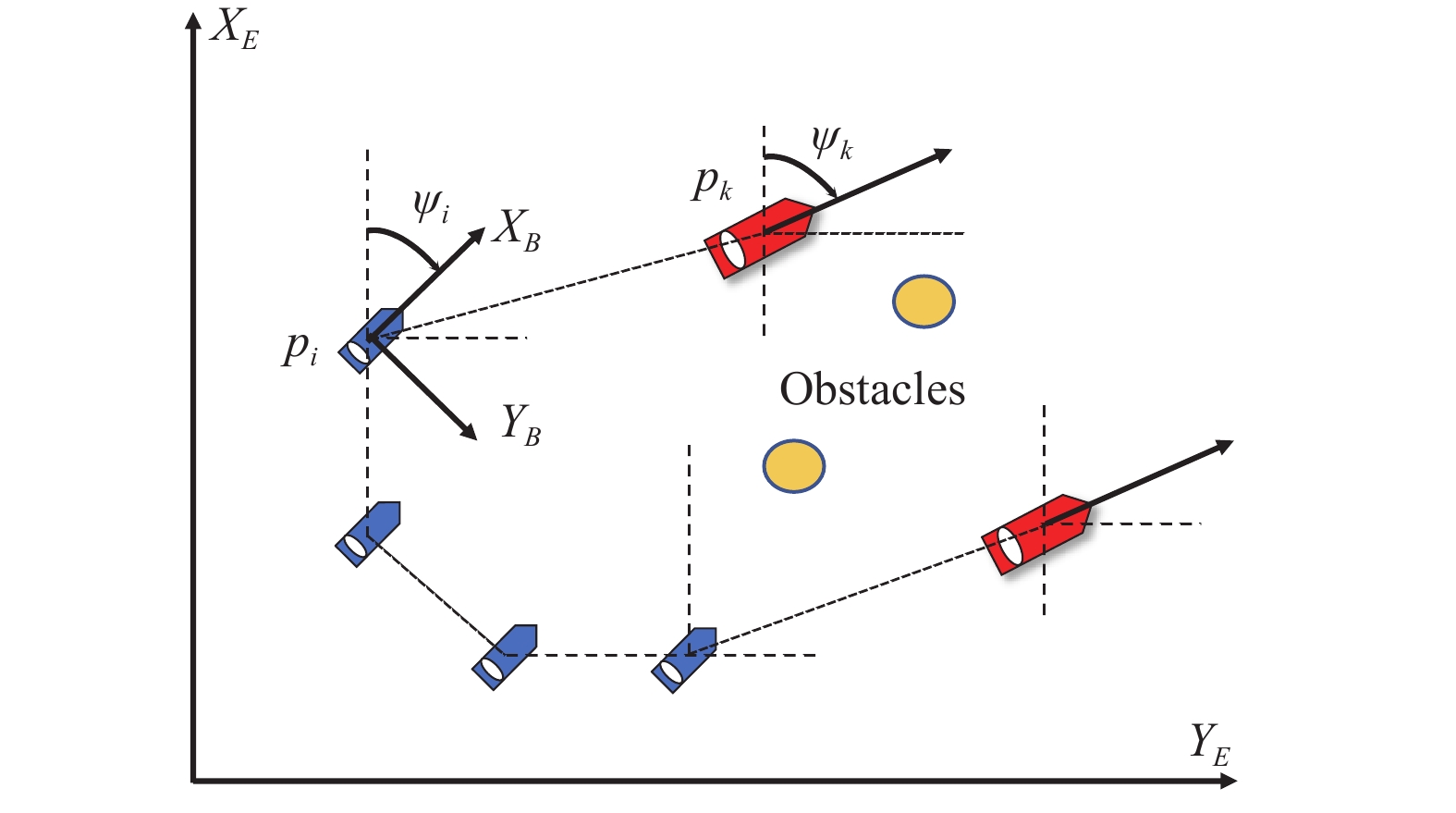
| Citation: | S. N. Gao, Z. H. Peng, H. L. Wang, L. Liu, and D. Wang, “Safety-critical model-free control for multi-target tracking of USVs with collision avoidance,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 7, pp. 1323–1326, Jul. 2022. doi: 10.1109/JAS.2022.105707

|

| [1] |
Z. Peng, J. Wang, D. Wang, and Q.-L. Han, “An overview of recent advances in coordinated control of multiple autonomous surface vehicles,” IEEE Trans. Ind. Inform., vol. 17, no. 2, pp. 732–745, Feb. 2021. doi: 10.1109/TII.2020.3004343
|
| [2] |
X. Ge, Q.-L. Han, and X.-M. Zhang, “Achieving cluster formation of multi-agent systems under aperiodic sampling and communication delays,” IEEE Trans. Ind. Inform., vol. 65, no. 4, pp. 3417–3426, Apr. 2018. doi: 10.1109/TIE.2017.2752148
|
| [3] |
X.-M. Zhang, Q.-L. Han, X. Ge, D. Ding, L. Ding, D. Yue, and C. Peng, “Networked control systems: A survey of trends and techniques,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 1–17, Jan. 2020. doi: 10.1109/JAS.2019.1911861
|
| [4] |
S.-L. Dai, S. He, M. Wang, and C. Yuan, “Adaptive neural control of underactuated surface vessels with prescribed performance guarantees,” IEEE Trans. Neural Netw. Learn. Syst., vol. 30, no. 12, pp. 3686–3698, Dec. 2019. doi: 10.1109/TNNLS.2018.2876685
|
| [5] |
T. Li, R. Zhao, C. L. P. Chen, L. Fang, and C. Liu, “Finite-time formation control of under-actuated ships using nonlinear sliding mode control,” IEEE Trans. Cybern., vol. 48, no. 11, pp. 3243–3253, Nov. 2018. doi: 10.1109/TCYB.2018.2794968
|
| [6] |
Z. Zheng, Y. Huang, L. Xie, and B. Zhu, “Adaptive trajectory tracking control of a fully actuated surface vessel with asymmetrically constrained input and output,” IEEE Trans. Control Syst. Technol, vol. 26, no. 5, pp. 1851–1859, Sep. 2018. doi: 10.1109/TCST.2017.2728518
|
| [7] |
Z. Wang, S. Yang, X. Xiang, A. Vasilijevic, N. Miskovic, and D. Nad, “Cloud-based mission control of USV fleet: Architecture, implementation and experiments, ” Control. Eng. Pract., vol. 106, Jan. p. 104657, 2021.
|
| [8] |
Y. Jiang, Z. Peng, D. Wang, Y. Yin, and Q.-L. Han, “Cooperative target enclosing of ring-networked under-actuated autonomous surface vehicles based on data-driven fuzzy predictors and extended state observers, ” IEEE Trans. Fuzzy Syst., 2021. DOI: 10.1109/TFUZZ.2021.3087920.
|
| [9] |
Y. Yu, S. Peng, X. Dong, Q. Li, and Z. Ren, “UIF-based cooperative tracking method for multi-agent systems with sensor faults, ” Sci. China Inform. Sci., vol. 62, Jan. 2019, p. 010202.
|
| [10] |
R. Cui, S. S. Ge, B. V. E. How, and Y. S. Choo, “Leader-follower formation control of underactuated autonomous underwater vehicles,” Ocean Eng., vol. 37, pp. 1491–1502, Dec. 2010. doi: 10.1016/j.oceaneng.2010.07.006
|
| [11] |
L. Liu, D. Wang, Z. Peng, and C. L. P. Chen, “Bounded neural network control for target tracking of underactuated autonomous surface vehicles in the presence of uncertain target dynamics,” IEEE Trans. Neural Netw. Learn. Syst., vol. 30, no. 4, pp. 1241–1249, Apr. 2018.
|
| [12] |
S. He, M. Wang, S.-L. Dai, and F. Luo, “Leader-follower formation control of USVs with prescribed performance and collision avoidance,” IEEE Trans. Ind. Inform., vol. 15, no. 1, pp. 572–581, Jan. 2019. doi: 10.1109/TII.2018.2839739
|
| [13] |
J. Zhang, X. Xiang, and W. Li, “Advances in marine intelligent electromagnetic detection system, technology and applications: A review, ” IEEE Sens. J., 2021. DOI: 10.1109/JSEN.2021.3129286.
|
| [14] |
X. Ge, Q.-L. Han, J. Wang, and X.-M. Zhang, “A scalable adaptive approach to multi-vehicle formation control with obstacle avoidance,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 990–1004, 2022. doi: 10.1109/JAS.2021.1004263
|
| [15] |
D. Ding, Z. Wang, J. Lam, and B. Shen, “Finite-horizon H∞ control for discrete time-varying systems with randomly occurring nonlinearities and fading measurements,” IEEE Trans. Autom. Control, vol. 60, no. 9, pp. 2488–2493, Sep. 2015. doi: 10.1109/TAC.2014.2380671
|
| [16] |
H. Zhang and F. L. Lewis, “Adaptive cooperative tracking control of higher-order nonlinear systems with unknown dynamics,” Automatica, vol. 48, pp. 1432–1439, Jul. 2012. doi: 10.1016/j.automatica.2012.05.008
|
| [17] |
Z. Li, Z. Duan, G. Chen, and L. Huang, “Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint,” IEEE Trans. Circuits Syst. I Regul. Pap., vol. 57, no. 1, pp. 213–224, Jan. 2010. doi: 10.1109/TCSI.2009.2023937
|
| [18] |
F. Javier Carrillo and F. Rotella, “Some contributions to estimation for model-free control,” IFAC-PapersOnLine, vol. 48, no. 28, pp. 150–155, Dec. 2015. doi: 10.1016/j.ifacol.2015.12.116
|
| [19] |
R. Skjetne, T. I. Fossen, and P. Kokotovi, “Adaptive maneuvering with experiments for a model ship in a marine control laboratory,” Automatica, vol. 41, pp. 258–298, Feb. 2005.
|
Figures(6)






 DownLoad:
DownLoad: