A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 3
Volume 9
Issue 3
IEEE/CAA Journal of Automatica Sinica
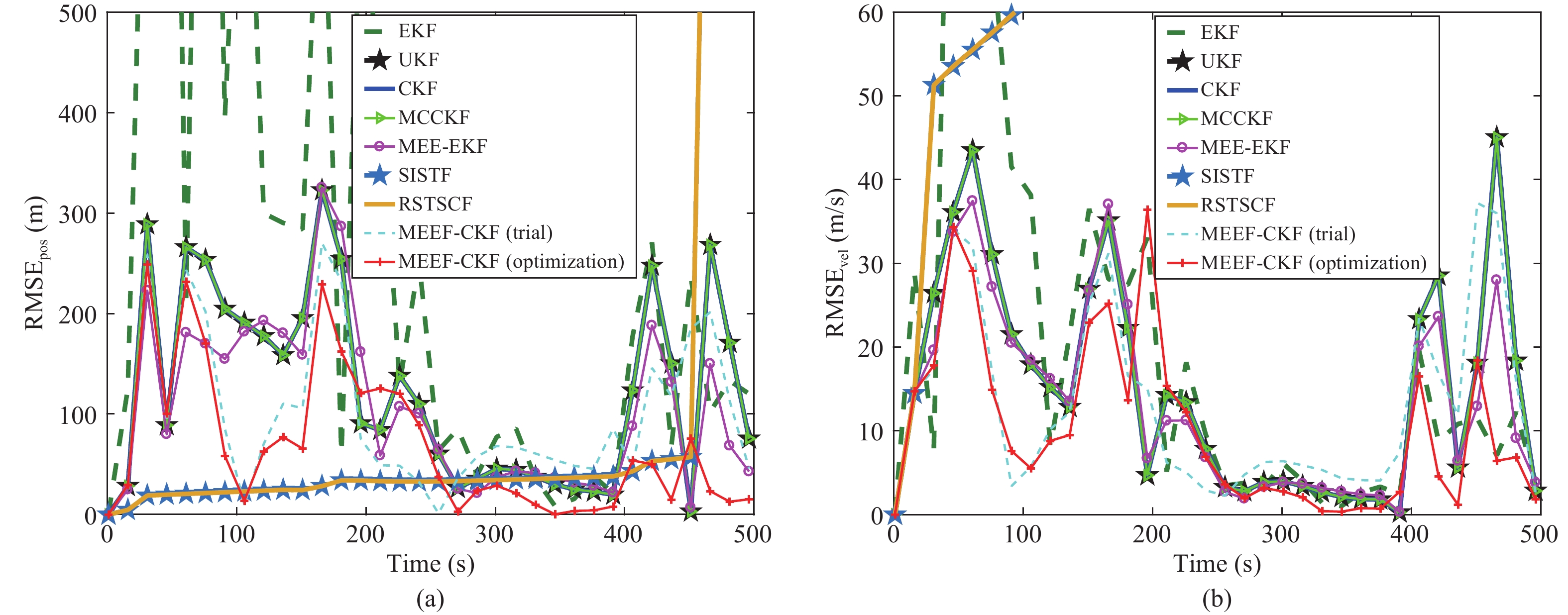
| Citation: | L. J. Dang, B. D. Chen, Y. L. Huang, Y. G. Zhang, and H. Q. Zhao, “Cubature Kalman filter under minimum error entropy with fiducial points for INS/GPS integration,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 3, pp. 450–465, Mar. 2022. doi: 10.1109/JAS.2021.1004350

|

| [1] |
B. Parkinson, J. Spilker, P. Axelrad, and P. Enge, Global Positioning System: Theory and Applications. Norwood, MA, USA: Artech House, 2008.
|
| [2] |
L. Chang, J. Li, and K. Li, “Optimization-based alignment for strapdown inertial navigation system: Comparison and extension,” IEEE Trans. Aerosp. Electron. Syst., vol. 52, no. 4, pp. 1697–1713, Aug. 2016. doi: 10.1109/TAES.2016.130824
|
| [3] |
D. Titterton and J. Weston, Strapdown Inertial Navigation Technology. London, UK: Institution of Engineering and Technology, 2004.
|
| [4] |
P. D. Groves, Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. Washington, USA: American Institute of Aeronautics and Astronautics, 1996.
|
| [5] |
M. Grewal, L. Weill, and A. Andrews, Global Positioning Systems, Inertial Navigation, and Integration. Hoboken, NJ: A John Wiley & Sons, 2007.
|
| [6] |
F. Zhao, C. Chen, W. He, and S. Sam Ge, “A filtering approach based on MMAE for a SINS / CNS integrated navigation system,” IEEE/CAA Journal of Automatica Sinica, vol. 5, no. 6, pp. 1113–1120, Nov. 2018. doi: 10.1109/JAS.2017.7510445
|
| [7] |
Y. Huang, Y. Zhang, and L. Chan, “A new fast in-motion coarse alignment method for GPS-aided low-cost SINS,” IEEE/ASME Trans. Mechatronics, vol. 23, no. 3, pp. 1303–1313, May 2018. doi: 10.1109/TMECH.2018.2835486
|
| [8] |
C. B. Medeiros and M. M. Wanderley, “Multiple-model linear Kalman filter framework for unpredictable signals,” IEEE Sensors J., vol. 14, no. 4, pp. 979–991, Apr. 2014. doi: 10.1109/JSEN.2013.2291683
|
| [9] |
A. Singh, “Major development under Gaussian filtering since unscented Kalman filter,” IEEE/CAA Journal of Automatica Sinica, vol. 7, no. 5, pp. 1308–1325, Sep. 2020.
|
| [10] |
S. Julier and J. Uhlmann, “A new extension of the Kalman filter to nonlinear systems,” in Proc. 11th Int. Symp. Aerospace/Defence Sens., Simul. Controls, 1997, pp. 182–193.
|
| [11] |
K. H. Kim, J. G. Lee, and C. G. Park, “Adaptive two-stage extended Kalman filter for a fault-tolerant INS/GPS loosely coupled system,” IEEE Trans. Aerosp. Electron. Syst., vol. 45, no. 1, pp. 125–137, Jan. 2009. doi: 10.1109/TAES.2009.4805268
|
| [12] |
D. Sun, M. G. Petovello, and M. E. Cannon, “Ultratight GPS/reducedIMU integration for land vehicle navigation,” IEEE Trans. Aerosp. Electron. Syst., vol. 49, no. 3, pp. 1781–1791, Jul. 2013. doi: 10.1109/TAES.2013.6558019
|
| [13] |
J. Wendel, J. Metzger, R. Moenikes, A. Maier, and G. F. Trommer, “A performance comparison of tightly coupled GPS/INS navigation systems based on extended and sigma point Kalman filters,” Navigation, vol. 53, no. 1, pp. 21–31, Aug. 2014.
|
| [14] |
J. Zhou, Y. Yang, J. Zhang, E. Edwan, and O. Loffeld, “Tightly coupled INS/GPS using quaternion-based unscented Kalman filter,” in Proc. AIAA Guid., Navigat., Control Conf., Portland, OR, USA, 2011, pp. 1–14.
|
| [15] |
L. Chang, K. Li, and B. Hu, “Huber’s M-estimation-based process uncertainty robust filter for integrated INS/GPS,” IEEE Sensors J., vol. 15, no. 6, pp. 3367–3374, Jun. 2015. doi: 10.1109/JSEN.2014.2384492
|
| [16] |
I. Arasaratnam and S. Haykin, “Cubature Kalman filters,” IEEE Trans. Autom. Control, vol. 54, pp. 1254–1269, Jun. 2009. doi: 10.1109/TAC.2009.2019800
|
| [17] |
B. Cui, X. Chen, and X. Tang, “Improved cubature Kalman filter for GNSS/INS based on transformation of posterior sigma-points error,” IEEE Trans. Signal Process., vol. 65, no. 11, pp. 2975–2987, Mar. 2017. doi: 10.1109/TSP.2017.2679685
|
| [18] |
Y. Zhao, “Performance evaluation of cubature Kalman filter in a GPS/IMU tightly-coupled navigation system,” Signal Process., vol. 119, pp. 67–79, Feb. 2016. doi: 10.1016/j.sigpro.2015.07.014
|
| [19] |
B. Cui, X. Chen, Y. Xu, H. Huang, and X. Liu, “Performance analysis of improved iterated cubature Kalman filter and its application to GNSS/INS,” ISA Trans., vol. 66, pp. 460–468, Jan. 2017. doi: 10.1016/j.isatra.2016.09.010
|
| [20] |
M. D. Pham, K. S. Low, S. T. Goh, and S. S. Chen, “Gain-scheduled extended Kalman filter for nanosatellite attitude determination system,” IEEE Trans. Aerosp. Electron. Syst., vol. 51, no. 2, pp. 1017–1028, Apr. 2015. doi: 10.1109/TAES.2014.130204
|
| [21] |
S. V. Bordonaro, P. W, Y. Bar-Shalom, and T. Luginbuhl, “Converted measurement sigma point Kalman filter for bistatic sonar and radar tracking,” IEEE Trans. Aerosp. Electron. Syst., vol. 55, no. 1, pp. 147–159, Feb. 2019. doi: 10.1109/TAES.2018.2849179
|
| [22] |
K. Feng, J. Li, X. Zhang, X. Zhang, C. Shen, H. Cao, Y. Yang, and J. Liu, “An improved strong tracking cubature Kalman filter for GPS/INS integrated navigation systems,” Sensors, vol. 18, no. 6, Article No. 1919, Jun. 2018. doi: 10.3390/s18061919
|
| [23] |
X. Chen, C. Shen, W. B. Zhang, M. Tomizuka, Y. Xu, and K. L. Chiu, “Novel hybrid of strong Kalman filter and wavelet neural network for GPS/INS during GPS outages,” Measurement, vol. 46, no. 10, pp. 3847–3854, Dec. 2013. doi: 10.1016/j.measurement.2013.07.016
|
| [24] |
M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking,” IEEE Trans. Signal Process., vol. 50, no. 2, pp. 174–188, Feb. 2002. doi: 10.1109/78.978374
|
| [25] |
X. Liu, H. Qu, J. Zhao, and P. Yue, “Maximum correntropy squareroot cubature Kalman filter with application to SINS/GPS integrated systems,” ISA Trans., vol. 80, pp. 195–202, May 2018. doi: 10.1016/j.isatra.2018.05.001
|
| [26] |
J. C. Príncipe, Information Theoretic Learning: Renyis Entropy and Kernel Perspectives, New York, NY, USA: Springer, 2010.
|
| [27] |
D. L. Alspach and H. Sorenson, “Nonlinear Bayesian estimation using Gaussian sum approximations,” IEEE Trans. Autom. Control, vol. 17, no. 4, pp. 439–448, Aug. 1972. doi: 10.1109/TAC.1972.1100034
|
| [28] |
Y. Huang and Y. Zhang, “A new process uncertainty robust Student’s t based Kalman filter for SINS/GPS integration,” IEEE Access, vol. 5, pp. 14391–14404, Jul. 2017. doi: 10.1109/ACCESS.2017.2726519
|
| [29] |
O. Straka and J. Duník, “Stochastic integration Student’s − t filter,” in Proc. 20th Int. Conf. Inf. Fusion, pp. 1–8, Jul. 2017.
|
| [30] |
Y. Huang and Y. Zhang, “Robust student’s t based stochastic cubature filter for nonlinear systems with heavy-tailed process and measurement noises,” IEEE Access, vol. 5, no. 5, pp. 7964–7974, May 2017.
|
| [31] |
F. Sun and L. Tang, “Cubature particle filter,” Syst. Eng. Electron., vol. 33, no. 11, pp. 2554–2557, Nov. 2011.
|
| [32] |
B. Cui, X. Chen, X. Tang, H. Huang, and X. Liu, “Robust cubature Kalman filter for GNSS/INS with missing observations and colored measurement noise,” ISA Trans., vol. 72, pp. 138–146, Jan. 2018. doi: 10.1016/j.isatra.2017.09.019
|
| [33] |
L. Mili, G. Steeno, F. Dobraca, and D. French, “A robust estimation method for topology error identification,” IEEE Trans. Power Syst., vol. 14, no. 4, pp. 1469–1476, Nov. 1999. doi: 10.1109/59.801932
|
| [34] |
L. Mili and C. W. Coakley, “Robust estimation in structured linear regression,” Ann. Statist., vol. 24, no. 6, pp. 2593–2607, Dec. 1996.
|
| [35] |
Y. S. Shmaliy, “An iterative Kalman-like algorithm ignoring noise and initial conditions,” IEEE Trans. Signal Process., vol. 59, no. 6, pp. 2465–2473, Jun. 2011. doi: 10.1109/TSP.2011.2129516
|
| [36] |
T. Chien-Hao, S. F. Lin, and J. Dah-Jing, “Robust Huber-based cubature Kalman filter for GPS navigation processing,” J. Navigat, vol. 229, no. 7, vol. 70, pp. 527–546, Otc. 2016.
|
| [37] |
K. Li, B. Hu, L. Chang, and Y. Li, “Robust square – Root cubature Kalman filter based on Huber’s mestimation methodology,” Proc. Inst. Mech. Eng. G-J. Aer., vol. 229, no. 7, pp. 1236–1245, Jun. 2015. doi: 10.1177/0954410014548698
|
| [38] |
A. Singh and J. C. Príncipe, “Using correntropy as a cost function in linear adaptive filters,” in Proc. Int. Joint Conf. Neural Netw (IJCNN), Jul. 2009, pp. 2950–2955.
|
| [39] |
B. Chen, J. Wang, H. Zhao, N. Zheng, and J. C. Príncipe, “Convergence of a fixed-point algorithm under maximum correntropy criterion,” IEEE Signal Process. Lett., vol. 22, no. 10, pp. 1723–1727, Otc. 2015. doi: 10.1109/LSP.2015.2428713
|
| [40] |
B. Chen, X. Liu, H. Zhao, and J. C. Príncipe, “Maximum correntropy Kalman filter,” Automatica, vol. 76, pp. 70–77, Feb. 2017. doi: 10.1016/j.automatica.2016.10.004
|
| [41] |
H. Wang, H. Li, J. Zuo, W. Zhang, and H. Wang, “Maximum correntropy derivative-free robust Kalman filter and smoother,” IEEE Access, vol. 6, pp. 70794–70807, Nov. 2018. doi: 10.1109/ACCESS.2018.2880618
|
| [42] |
S. Wang, C. Yin, G. Qian, Y. Feng, S. Kai, and L. Wang, “Maximum correntropy cubature Kalman filter based on statistical linear regression,” C.N. Patent, 106487358 A, Mar. 8, 2017. [Online]. Available: https://ieeexplore.ieee.org/document/9546666.
|
| [43] |
B. Chen, L. Xing, B. Xu, H. Zhao, and J. C. Príncipe, “Insights into the robustness of minimum error entropy estimation,” IEEE Trans. Neural Netw. Learn. Syst., vol. 29, no. 3, pp. 731–737, Mar. 2018. doi: 10.1109/TNNLS.2016.2636160
|
| [44] |
D. Erdogmus and J. C. Príncipe., “An error-entropy minimization for supervised training of nonlinear adaptive systems,” IEEE Trans. Signal Process., vol. 50, no. 7, pp. 1780–1786, Jul. 2002. doi: 10.1109/TSP.2002.1011217
|
| [45] |
Y. Zhang, B. Chen, X. Liu, Z. Yuan, and J. C. Príncipe, “Convergence of a fixed-point minimum error entropy algorithm,” Entropy, vol. 17, no. 8, pp. 5549–5560, Aug. 2015.
|
| [46] |
B. Chen, L. Dang, Y. Gu, N. Zheng, and J. C. Principe, “Minimum error entropy Kalman filter,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 51, no. 9, pp. 5819–5829, Sep. 2021.
|
| [47] |
W. Liu, P. P. Pokharel, and J. C. Príncipe, “Error entropy, correntropy and M-estimation,” in Proc. 16th IEEE Workshop Machine Learn. Signal Process., 2006, pp. 179–184.
|
| [48] |
J. Zhao and L. Mili, “A robust generalized-maximum likelihood unscented Kalman filter for power system dynamic state estimation,” IEEE J. Sel. Topics Signal Process., vol. 12, no. 4, pp. 578–592, Aug. 2018. doi: 10.1109/JSTSP.2018.2827261
|
| [49] |
C. Andreou and V. Karathanassi, “Estimation of the number of endmembers using robust outlier detection method,” IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens., vol. 7, no. 1, pp. 247–256, Jan. 2014. doi: 10.1109/JSTARS.2013.2260135
|
| [50] |
B. Chen, X. Wang, Y. Li, and J. C. Príncipe, “Maximum correntropy criterion with variable center,” IEEE Signal Process. Lett., vol. 26, no. 8, pp. 1212–1216, Aug. 2019. doi: 10.1109/LSP.2019.2925692
|
| [51] |
B. Chen, X. Wang, Z. Yuan, P. Ren, and J. Qin, “MultiKernel correntropy for robust learning,” [Online]. Available: https://ieeexplore.ieee.org/document/9546666. Accessed on: Oct. 15, 2021.
|
| [52] |
B. Ristic, S. Arulampalam, and N. Gordon, Beyond the Kalman Filter: Particle Filters for Tracking Applications. Norwood, MA, USA: Artech House, 2003.
|

Figures(7) / Tables(4)






 DownLoad:
DownLoad: