A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 3
Volume 9
Issue 3
IEEE/CAA Journal of Automatica Sinica
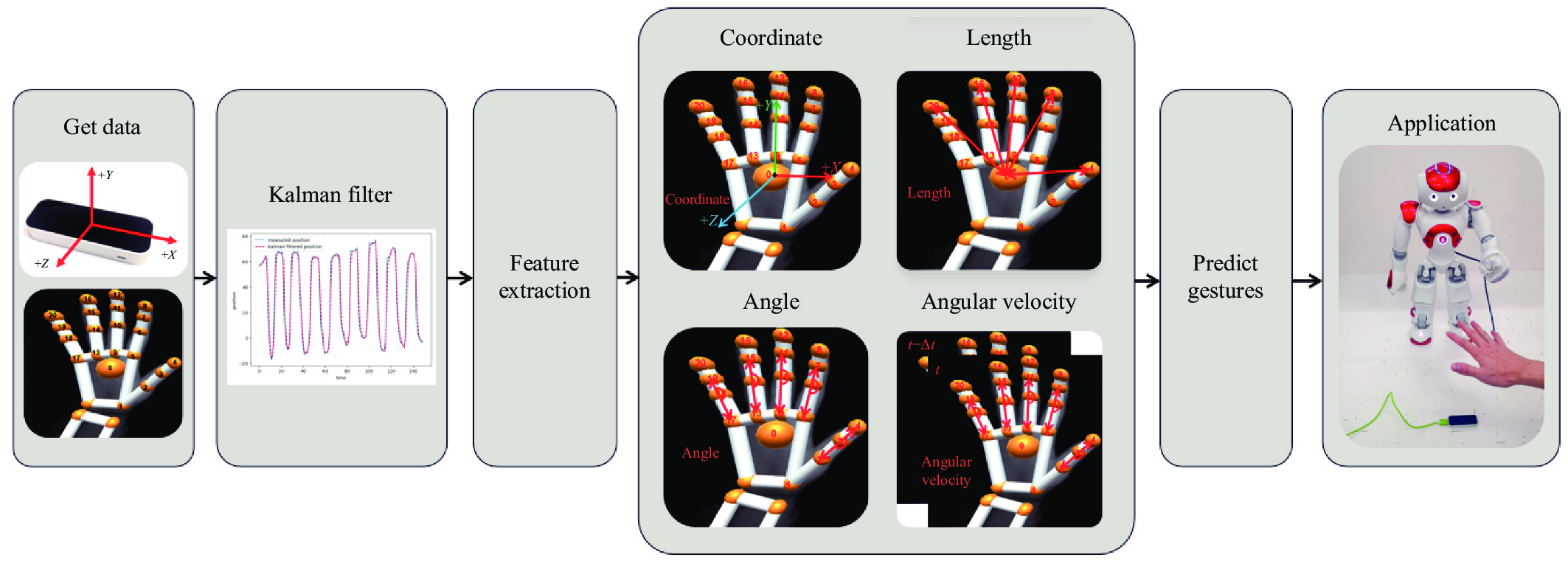
| Citation: | B. X. Wu, J. P. Zhong, and C. G. Yang, “A visual-based gesture prediction framework applied in social robots,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 3, pp. 510–519, Mar. 2022. doi: 10.1109/JAS.2021.1004243

|

| [1] |
C. Yang, H. Wu, Z. Li, W. He, N. Wang, and C.-Y. Su, “Mind control of a robotic arm with visual fusion technology,” IEEE Trans. Industrial Informatics, vol. 14, no. 9, pp. 3822–3830, 2017.
|
| [2] |
J. Zhang, M. Li, Y. Feng, and C. Yang, “Robotic grasp detection based on image processing and random forest,” Multimedia Tools and Applications, vol. 79, no. 3, pp. 2427–2446, 2020.
|
| [3] |
J. Li, J. Zhong, J. Yang, and C. Yang, “An incremental learning framework to enhance teaching by demonstration based on multimodal sensor fusion,” Frontiers in Neurorobotics, vol. 14, p. 5, 2020.
|
| [4] |
P. Premaratne, “Historical development of hand gesture recognition,” in Human Computer Interaction Using Hand Gestures. Singapore: Springer, 2014, pp. 5–29.
|
| [5] |
M. Oudah, A. Al-Naji, and J. Chahl, “Hand gesture recognition based on computer vision: A review of techniques,” Journal of Imaging, vol. 6, no. 8, p. 73, 2020.
|
| [6] |
A. S. Al-Shamayleh, R. Ahmad, M. A. Abushariah, K. A. Alam, and N. Jomhari, “A systematic literature review on vision based gesture recognition techniques,” Multimedia Tools and Applications, vol. 77, no. 21, pp. 28121–28184, 2018. doi: 10.1007/s11042-018-5971-z
|
| [7] |
L. Dipietro, A. M. Sabatini, and P. Dario, “A survey of glove-based systems and their applications,” IEEE Trans. Systems,Man,and Cybernetics,Part C (Applications and Reviews)
|
| [8] |
A. Jaramillo-Yánez, M. E. Benalcázar, and E. Mena-Maldonado, “Real-time hand gesture recognition using surface electromyography and machine learning: A systematic literature review,” Sensors, vol. 20, no. 9, p. 2467, 2020.
|
| [9] |
J. Qi, G. Jiang, G. Li, Y. Sun, and B. Tao, “Surface EMG hand gesture recognition system based on PCA and GRNN,” Neural Computing and Applications, vol. 32, no. 10, pp. 6343–6351, 2020. doi: 10.1007/s00521-019-04142-8
|
| [10] |
S. Jiang, Q. Gao, H. Liu, and P. B. Shull, “A novel, co-located EMG-FMG-sensing wearable armband for hand gesture recognition,” Sensors and Actuators A: Physical, vol. 301, p. 111738, 2020.
|
| [11] |
W.-T. Shi, Z.-J. Lyu, S.-T. Tang, T.-L. Chia, and C.-Y. Yang, “A bionic hand controlled by hand gesture recognition based on surface EMG signals: A preliminary study,” Biocybernetics and Biomedical Engineering, vol. 38, no. 1, pp. 126–135, 2018. doi: 10.1016/j.bbe.2017.11.001
|
| [12] |
S. S. Rautaray and A. Agrawal, “Vision based hand gesture recognition for human computer interaction: A survey,” Artificial Intelligence Review, vol. 43, no. 1, pp. 1–54, 2015. doi: 10.1007/s10462-012-9356-9
|
| [13] |
A. Kurakin, Z. Zhang, and Z. Liu, “A real time system for dynamic hand gesture recognition with a depth sensor,” in Proc. IEEE 20th European Signal Processing Conf., 2012, pp. 1975–1979.
|
| [14] |
H. Cheng, L. Yang, and Z. Liu, “Survey on 3D hand gesture recognition,” IEEE Trans. Circuits and Systems for Video Technology, vol. 26, no. 9, pp. 1659–1673, 2015.
|
| [15] |
P. Barros, N. T. Maciel-Junior, B. J. Fernandes, B. L. Bezerra, and S. M. Fernandes, “A dynamic gesture recognition and prediction system using the convexity approach,” Computer Vision and Image Understanding, vol. 155, pp. 139–149, 2017. doi: 10.1016/j.cviu.2016.10.006
|
| [16] |
P. K. Pisharady and M. Saerbeck, “Recent methods and databases in vision-based hand gesture recognition: A review,” Computer Vision and Image Understanding, vol. 141, pp. 152–165, 2015. doi: 10.1016/j.cviu.2015.08.004
|
| [17] |
Z. Ren, J. Yuan, J. Meng, and Z. Zhang, “Robust part-based hand gesture recognition using kinect sensor,” IEEE Trans. Multimedia, vol. 15, no. 5, pp. 1110–1120, 2013. doi: 10.1109/TMM.2013.2246148
|
| [18] |
Y. Li, “Hand gesture recognition using kinect,” in Proc. IEEE Int. Conf. Computer Science and Automation Engineering, 2012, pp. 196–199.
|
| [19] |
D. Bachmann, F. Weichert, and G. Rinkenauer, “Review of three-dimensional human-computer interaction with focus on the leap motion controller,” Sensors, vol. 18, no. 7, p. 2194, 2018.
|
| [20] |
D. Avola, M. Bernardi, L. Cinque, G. L. Foresti, and C. Massaroni, “Exploiting recurrent neural networks and leap motion controller for the recognition of sign language and semaphoric hand gestures,” IEEE Trans. Multimedia, vol. 21, no. 1, pp. 234–245, 2018.
|
| [21] |
Z. Zhang, C. He, and K. Yang, “A novel surface electromyographic signal-based hand gesture prediction using a recurrent neural network,” Sensors, vol. 20, no. 14, p. 3994, 2020.
|
| [22] |
C. Wei, W. Zhou, J. Pu, and H. Li, “Deep grammatical multi-classifier for continuous sign language recognition,” in Proc. IEEE 5th Int. Conf. Multimedia Big Data, 2019, pp. 435–442.
|
| [23] |
P. Kumar, H. Gauba, P. P. Roy, and D. P. Dogra, “A multimodal framework for sensor based sign language recognition,” Neurocomputing, vol. 259, pp. 21–38, 2017. doi: 10.1016/j.neucom.2016.08.132
|
| [24] |
S. Hochreiter and J. Schmidhuber, “Long short-term memory,” Neural Computation, no. 9, pp. 1735–1780, 1997.
|
| [25] |
X. Yu, W. He, H. Li, and J. Sun, “Adaptive fuzzy full-state and outputfeedback control for uncertain robots with output constraint,” IEEE Trans. Systems,Man,and Cybernetics:Systems, 2020.
|
| [26] |
W. He, Z. Li, and C. P. Chen, “A survey of human-centered intelligent robots: Issues and challenges,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 4, pp. 602–609, 2017. doi: 10.1109/JAS.2017.7510604
|
| [27] |
T.-W. Chong and B.-G. Lee, “American sign language recognition using leap motion controller with machine learning approach,” Sensors, vol. 18, no. 10, p. 3554, 2018.
|
| [28] |
A. Vaitkevičius, M. Taroza, T. Blažauskas, R. Damaševičius, R. Maske-liūnas, and M. Woźniak, “Recognition of american sign language gestures in a virtual reality using leap motion,” Applied Sciences, vol. 9, no. 3, p. 445, 2019.
|
| [29] |
W. Zeng, C. Wang, and Q. Wang, “Hand gesture recognition using leap motion via deterministic learning,” Multimedia Tools and Applications, vol. 77, no. 21, pp. 28185–28206, 2018.
|
| [30] |
G. Marin, F. Dominio, and P. Zanuttigh, “Hand gesture recognition with jointly calibrated leap motion and depth sensor,” Multimedia Tools and Applications, vol. 75, no. 22, pp. 1–25, 2016.
|
| [31] |
F. Weichert, D. Bachmann, B. Rudak, and D. Fisseler, “Analysis of the accuracy and robustness of the leap motion controller,” Sensors, vol. 13, no. 5, pp. 6380–6393, 2013. doi: 10.3390/s130506380
|
| [32] |
D. Gouaillier, V. Hugel, P. Blazevic, C. Kilner, J. Monceaux, P. Lafourcade, B. Marnier, J. Serre, and B. Maisonnier, “Mechatronic design of NAO humanoid,” in Proc. IEEE Int. Conf. Robotics and Automation, 2009, pp. 769–774.
|
Figures(17)






 DownLoad:
DownLoad: