A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 3
Volume 7
Issue 3
IEEE/CAA Journal of Automatica Sinica
| Citation: | Reza Mohsenipour and Xinzhi Liu, "Robust D-Stability Test of LTI General Fractional Order Control Systems," IEEE/CAA J. Autom. Sinica, vol. 7, no. 3, pp. 853-864, May 2020. doi: 10.1109/JAS.2020.1003159

|

| [1] |
K. Diethelm, The Analysis of Fractional Differential Equations: An Application-Oriented Exposition Using Differential Operators of Caputo Type. Springer-Verlag, 2010.
|
| [2] |
J. Xu and J. Li, “Stochastic dynamic response and reliability assessment of controlled structures with fractional derivative model of viscoelastic dampers,” Mech. Syst. Sig. Process., vol. 72, pp. 865–896, 2016.
|
| [3] |
I. N. Doye, K. N. Salama, and T. M. Laleg-Kirati, “Robust fractionalorder proportional-integral observer for synchronization of chaotic fractional-order systems,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 268–277, 2019. doi: 10.1109/JAS.2017.7510874
|
| [4] |
J. Liang and Y. Q. Chen, “Hybrid symbolic and numerical simulation studies of time-fractional order wave-diffusion systems,” Int. J. Control, vol. 79, no. 11, pp. 1462–1470, 2006. doi: 10.1080/00207170600726493
|
| [5] |
C. Ionescu, A. Lopes, D. Copot, J. A. T. Machado, and J. H. T. Bates, “The role of fractional calculus in modeling biological phenomena: A review,” Commun. Nonlinear Sci. Numer. Simul., vol. 51, pp. 141–159, 2017. doi: 10.1016/j.cnsns.2017.04.001
|
| [6] |
H. Yang, F. Wang, and F. Han, “Containment control of fractional order multi-agent systems with time delays,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 727–732, 2018. doi: 10.1109/JAS.2016.7510211
|
| [7] |
J. Huang, Y. Chen, H. Li, and X. Shi, “Fractional order modeling of human operator behavior with second order controlled plant and experiment research,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 3, pp. 271–280, 2016. doi: 10.1109/JAS.2016.7508802
|
| [8] |
Y. Zhao, Y. Li, F. Zhou, Z. Zhou, and Y. Q. Chen, “An iterative learning approach to identify fractional order KiBaM model,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 2, pp. 322–331, 2017. doi: 10.1109/JAS.2017.7510358
|
| [9] |
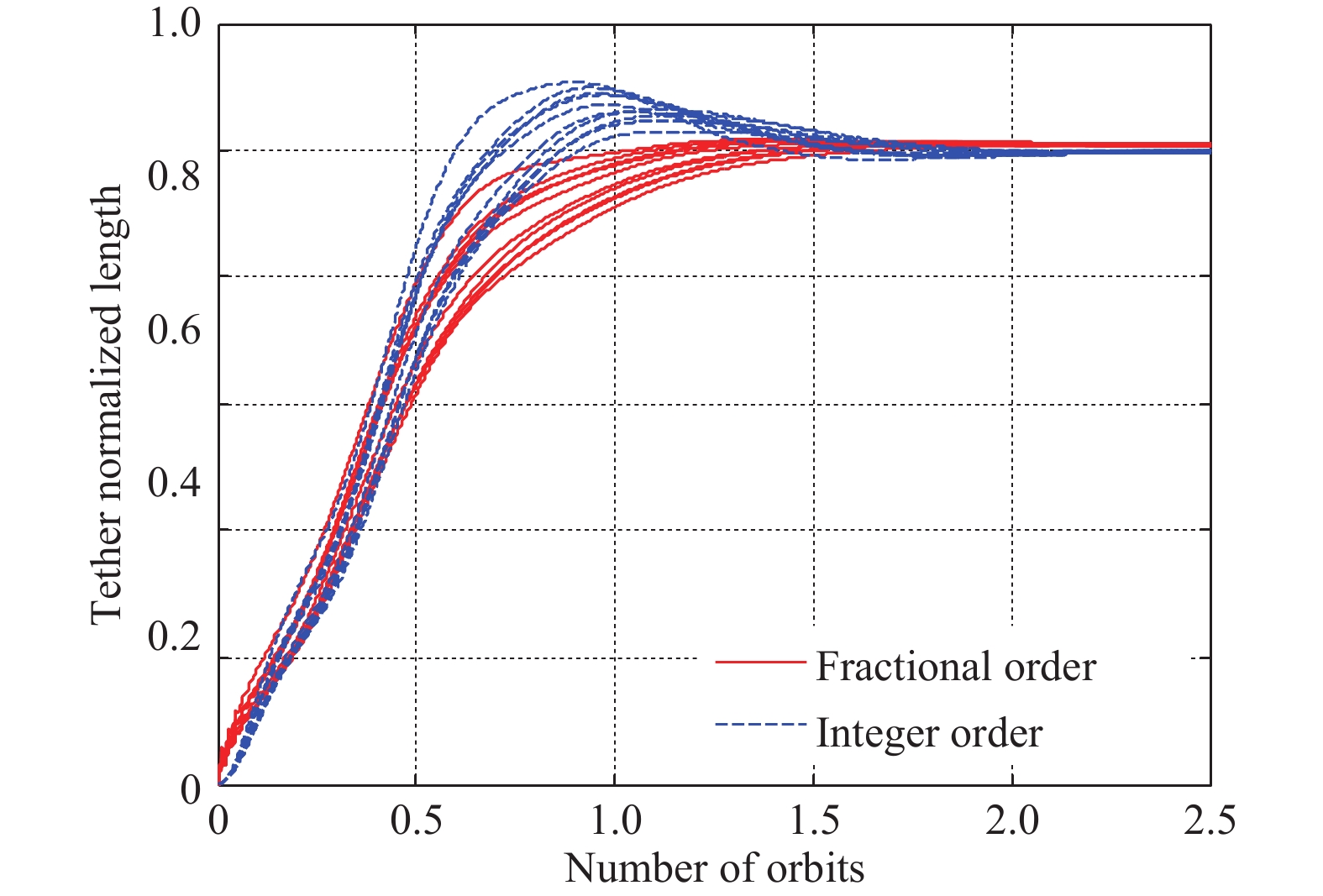
R. Mohsenipour, “Robust performance control of space tether deployment using fractional order tension law,” J. Guid. Control Dyn., vol. 43, no. 2, pp. 347–353, 2020. doi: 10.2514/1.G004304
|
| [10] |
C. A. Monje, B. M. Vinagre, V. Feliu, and Y. Q. Chen, “Tuning and autotuning of fractional order controllers for industry applications,” Control Eng. Pract., vol. 16, no. 7, pp. 798–812, 2008. doi: 10.1016/j.conengprac.2007.08.006
|
| [11] |
C. Hua, T. Zhang, Y. Li, and X. Guan, “Robust output feedback control for fractional order nonlinear systems with time-varying delays,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 4, pp. 477–482, 2016. doi: 10.1109/JAS.2016.7510106
|
| [12] |
R. Mohsenipour and M. Fathi-Jegarkandi, “Fractional order MIMO controllers for robust performance of airplane longitudinal motion,” Aerosp. Sci. Technol., vol. 91, pp. 617–626, 2019. doi: 10.1016/j.ast.2019.06.036
|
| [13] |
Z. Liao, C. Peng, W. Li, and Y. Wang, “Robust stability analysis for a class of fractional order systems with uncertain parameters,” J. Franklin Inst., vol. 348, no. 6, pp. 1101–1113, 2011. doi: 10.1016/j.jfranklin.2011.04.012
|
| [14] |
I. NDoye, M. Darouach, M. Zasadzinski, and N. E. Radhy, “Robust stabilization of uncertain descriptor fractional-order systems,” Automatica, vol. 49, no. 6, pp. 1907–1913, 2013. doi: 10.1016/j.automatica.2013.02.066
|
| [15] |
J. G. Lu and Y. A. Zhao, “Decentralised robust H ∞ control of fractionalorder interconnected systems with uncertainties,” Int. J. Control, vol. 90, no. 6, pp. 1221–1229, 2017. doi: 10.1080/00207179.2016.1201595
|
| [16] |
J. G. Lu and G. Chen, “Robust stability and stabilization of fractionalorder interval systems: An LMI approach,” IEEE Trans. Autom. Control, vol. 54, no. 6, pp. 1294–1299, 2009. doi: 10.1109/TAC.2009.2013056
|
| [17] |
S. Marir and M. Chadli, “Robust admissibility and stabilization of uncertain singular fractional-order linear time-invariant systems,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 3, pp. 685–692, 2019. doi: 10.1109/JAS.2019.1911480
|
| [18] |
B. Aguiar, T. Gonzalez, and M. Bernal, “Comments on “robust stability and stabilization of fractional-order interval systems with the fractional order α: The 0 < α < 1 case”,” IEEE Trans. Autom. Control, vol. 60, no. 2, pp. 582–583, 2015. doi: 10.1109/TAC.2014.2332711
|
| [19] |
M. Góra and D. Mielczarek, “Comments on “necessary and sufficient stability condition of fractional-order interval linear systems”[Automatica 44(2008), 2985–2988],” Automatica, vol. 50, no. 10, pp. 2734–2735, 2014. doi: 10.1016/j.automatica.2014.08.013
|
| [20] |
B. B. Alagoz, “A note on robust stability analysis of fractional order interval systems by minimum argument vertex and edge polynomials,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 4, pp. 411–421, 2016. doi: 10.1109/JAS.2016.7510088
|
| [21] |
H. Taghavian and M. S. Tavazoei, “Robust stability analysis of uncertain multiorder fractional systems: Young and Jensen inequalities approach,” Int. J. Robust Nonlinear Control, vol. 28, no. 4, pp. 1127–1144, 2018. doi: 10.1002/rnc.3919
|
| [22] |
N. Tan, Ö. Faruk Özgüven, and M. Mine Özyetkin, “Robust stability analysis of fractional order interval polynomials,” ISA Trans., vol. 48, no. 2, pp. 166–172, 2009. doi: 10.1016/j.isatra.2009.01.002
|
| [23] |
K. Akbari-Moornani and M. Haeri, “Robust stability testing function and Kharitonov-like theorem for fractional order interval systems,” IET Control Theory Appl., vol. 4, no. 10, pp. 2097–2108, 2010. doi: 10.1049/iet-cta.2009.0485
|
| [24] |
Z. Gao and X. Liao, “Robust stability criterion of fractional-order functions for interval fractional-order systems,” IET Control Theory Appl., vol. 7, no. 1, pp. 60–67, 2013. doi: 10.1049/iet-cta.2011.0356
|
| [25] |
Z. Gao, “Robust stabilization criterion of fractional-order controllers for interval fractional-order plants,” Automatica, vol. 61, pp. 9–17, 2015. doi: 10.1016/j.automatica.2015.07.021
|
| [26] |
C. Yeroglu and B. Senol, “Investigation of robust stability of fractional order multilinear affine systems: 2q-convex parpolygon approach,” Syst. Control Lett., vol. 62, no. 10, pp. 845–855, 2013. doi: 10.1016/j.sysconle.2013.06.005
|
| [27] |
K. Akbari-Moornani and M. Haeri, “On robust stability of linear time invariant fractional-order systems with real parametric uncertainties,” ISA Trans., vol. 48, no. 4, pp. 484–490, 2009. doi: 10.1016/j.isatra.2009.04.006
|
| [28] |
S. Zheng, “Robust stability of fractional order system with general interval uncertainties,” Syst. Control Lett., vol. 99, pp. 1–8, 2017. doi: 10.1016/j.sysconle.2016.11.001
|
| [29] |
S. Zheng and W. Li, “Stabilizing region of PDμ controller for fractional order system with general interval uncertainties and an interval delay,” J. Franklin Inst., vol. 355, no. 3, pp. 1107–1138, 2018. doi: 10.1016/j.jfranklin.2017.12.020
|
| [30] |
G. Chesi, “Parameter and controller dependent Lyapunov functions for robust D-stability and robust performance controller design,” IEEE Trans. Autom. Control, vol. 62, no. 9, pp. 4798–4803, 2017. doi: 10.1109/TAC.2017.2692559
|
| [31] |
C. Bonnet and J. R. Partington, “Analysis of fractional delay systems of retarded and neutral type,” Automatica, vol. 38, no. 7, pp. 1133–1138, 2002. doi: 10.1016/S0005-1098(01)00306-5
|
| [32] |
S. Zheng, X. Tang, and B. Song, “Graphical tuning method of FOPID controllers for fractional order uncertain system achieving robust D-stability,” Int. J. Robust Nonlinear Control, vol. 26, no. 5, pp. 1112–1142, 2016. doi: 10.1002/rnc.3363
|
| [33] |
R. Mohsenipour and M. Fathi-Jegarkandi, “Robust D-stability testing function for LTI fractional order interval systems, ” in Proc. IEEE Conf. Control Technol. Appl., pp. 1277–1282, 2018.
|
| [34] |
R. Mohsenipour and M. Fathi-Jegarkandi, “Robust D-stability analysis of fractional order interval systems of commensurate and incommensurate orders,” IET Control Theory Appl., vol. 13, no. 8, pp. 1039–1050, 2019. doi: 10.1049/iet-cta.2018.5111
|
| [35] |
R. Mohsenipour and M. Fathi-Jegarkandi, “A comment on “algorithm of robust stability region for interval plant with time delay using fractional order PIλDμ controller” [Commun. Nonlinear Sci. Numer. Simul. 17(2012) 979–991],” Commun. Nonlinear Sci. Numer. Simul., vol. 63, pp. 202–204, 2018. doi: 10.1016/j.cnsns.2018.03.008
|
| [36] |
K. Akbari-Moornani and M. Haeri, “On robust stability of LTI fractional-order delay systems of retarded and neutral type,” Automatica, vol. 46, no. 2, pp. 362–368, 2010. doi: 10.1016/j.automatica.2009.11.006
|
| [37] |
R. J. Minnichelli, J. J. Anagnost, and C. A. Desoer, “An elementary proof of Kharitonov’s stability theorem with extensions,” IEEE Trans. Autom. Control, vol. 34, no. 9, pp. 995–998, 1989. doi: 10.1109/9.35816
|
| [38] |
F. L. Janssens and J. C. van der Ha, “Stability of spinning satellite under axial thrust, internal mass motion, and damping,” J. Guid. Control Dyn., vol. 38, no. 4, pp. 761–771, 2015. doi: 10.2514/1.G000123
|
| [39] |
Z. Alam, L. Yuan, and Q. Yang, “Chaos and combination synchronization of a new fractional-order system with two stable node-foci,” IEEE/CAA J. Autom. Sinica, vol. 3, no. 2, pp. 157–164, 2016. doi: 10.1109/JAS.2016.7451103
|
| [40] |
B. Senol, A. Ates, B. Baykant Alagoz, and C. Yeroglu, “A numerical investigation for robust stability of fractional-order uncertain systems,” ISA Trans., vol. 53, no. 2, pp. 189–198, 2014. doi: 10.1016/j.isatra.2013.09.004
|
| [41] |
S. J. Chen and J. L. Lin, “Robust D-stability of discrete and continuous time interval systems,” J. Franklin Inst., vol. 341, no. 6, pp. 505–517, 2004. doi: 10.1016/j.jfranklin.2004.05.002
|
| [42] |
M. Marden, Geometry of Polynomials. No. 3, American Mathematical Society, 2 ed., 1966.
|
| [43] |
G. Sun and Z. H. Zhu, “Fractional-order tension control law for deployment of space tether system,” J. Guid. Control Dyn., vol. 37, no. 6, pp. 2057–2061, 2014. doi: 10.2514/1.G000496
|
| [44] |
S. Pradeep, “A new tension control law for deployment of tethered satellites,” Mech. Res. Commun., vol. 24, no. 3, pp. 247–254, 1997. doi: 10.1016/S0093-6413(97)00021-9
|
| [45] |
O. Y. Viro, O. A. Ivanov, N. Y. Netsvetaev, and V. M. Kharlamov, Elementary Topology: Problem Textbook. American Mathematical Society, 2008.
|
| [46] |
N. G. Lloyd, “Remarks on generalising Rouché’s theorem,” J. London Math. Soc., vol. s2–20, no. 2, pp. 259–272, 1979. doi: 10.1112/jlms/s2-20.2.259
|
Figures(10)






 DownLoad:
DownLoad: